On my computer, the odometry can't run over 20Hz, so generally I record at 15-20Hz source rate to save some space. But yes, this gives large databases.
For loop closure detection in an underground mine, visual features may look all similar, limiting the chance to detect loop closures. In the video you've posted, the second loop closure was on the same panel (with many distinctive visual features) as the early beginning of the video.
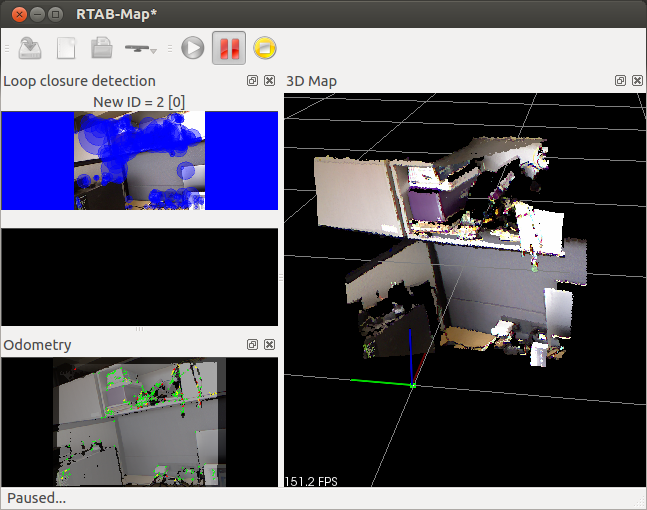
With RTAB-Map, you can do the same to find a loop closure between the beginning and the end of the run. On start, look at something very descriptive for a couple of seconds (make sure the loop closure detection view shows all blue circles as below), the current location will get more weight (it will not be forgotten if the time threshold is set).
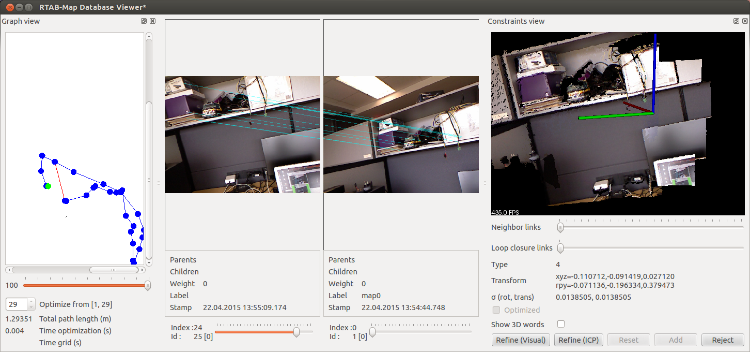
Well, if RTAB-Map cannot find automatically the loop closure, it can be done manually after the mapping is completed using the databaseViewer. Example (adding loop closure between location 1 and 25):
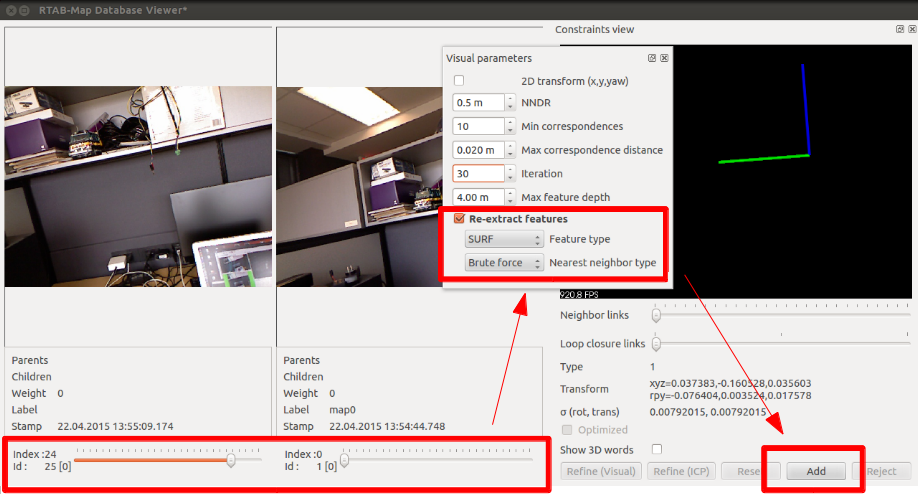
On success, you can see the two point clouds on the right. A red loop closure link is also added in the graph view:
When closing the database viewer, you will be asked to save changes in the database: