Hi,
First of all, rtabmap is a very interesting, and useful tool. Thanks.
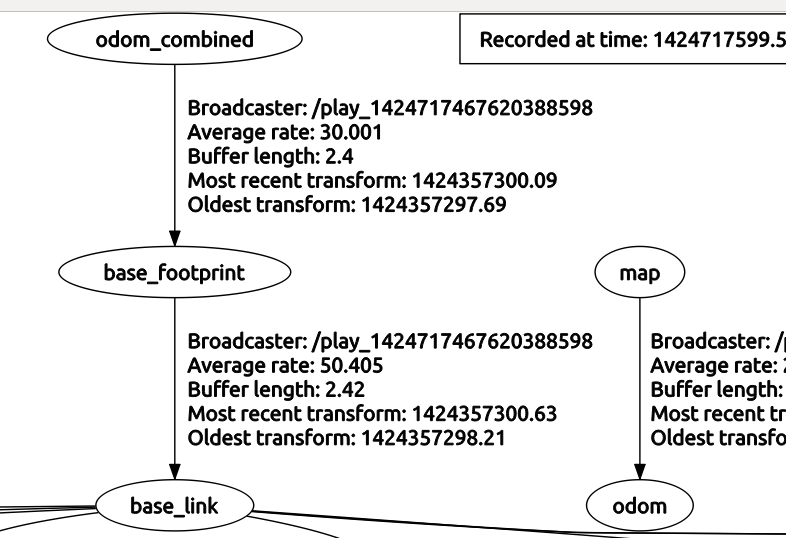
I have a question regarding its use. I'm performing slam using rtabmap (odom, lidar and kinect) --using datasets from a pr2. The problem is that the pr2 is publishing a tf for odometry (odom_combined -> base_footprint), and rtabmap is also publishing an map -> odom. In fact, I have two separate trees in my tf structure (image attached).
I'm new to the pr2 platform but I have seen that there is a EKF node that calculates a more accurate pose using the odometry and it is the one that is publishing the odom_combined tf.
I can see the map in rviz (if a use the fixed frame odom) but I cannot display the inputs from the sensors because there is no transformation between map and odom_combined, so I have no localization. I have seen in your stereo camera example that you filtered out the odom_combined tf, and so I did. But I still have two separate trees. I cannot figure out if I am missing a parameter to rename the odom frame id published by rtabmap, or if I can keep the odom_combined from EKF node (disable the odom tf from rtabmap) and make a transformation between the map to odom_combined.
I would appreciate your help or suggestions.
Best regards

