Hi Guido,
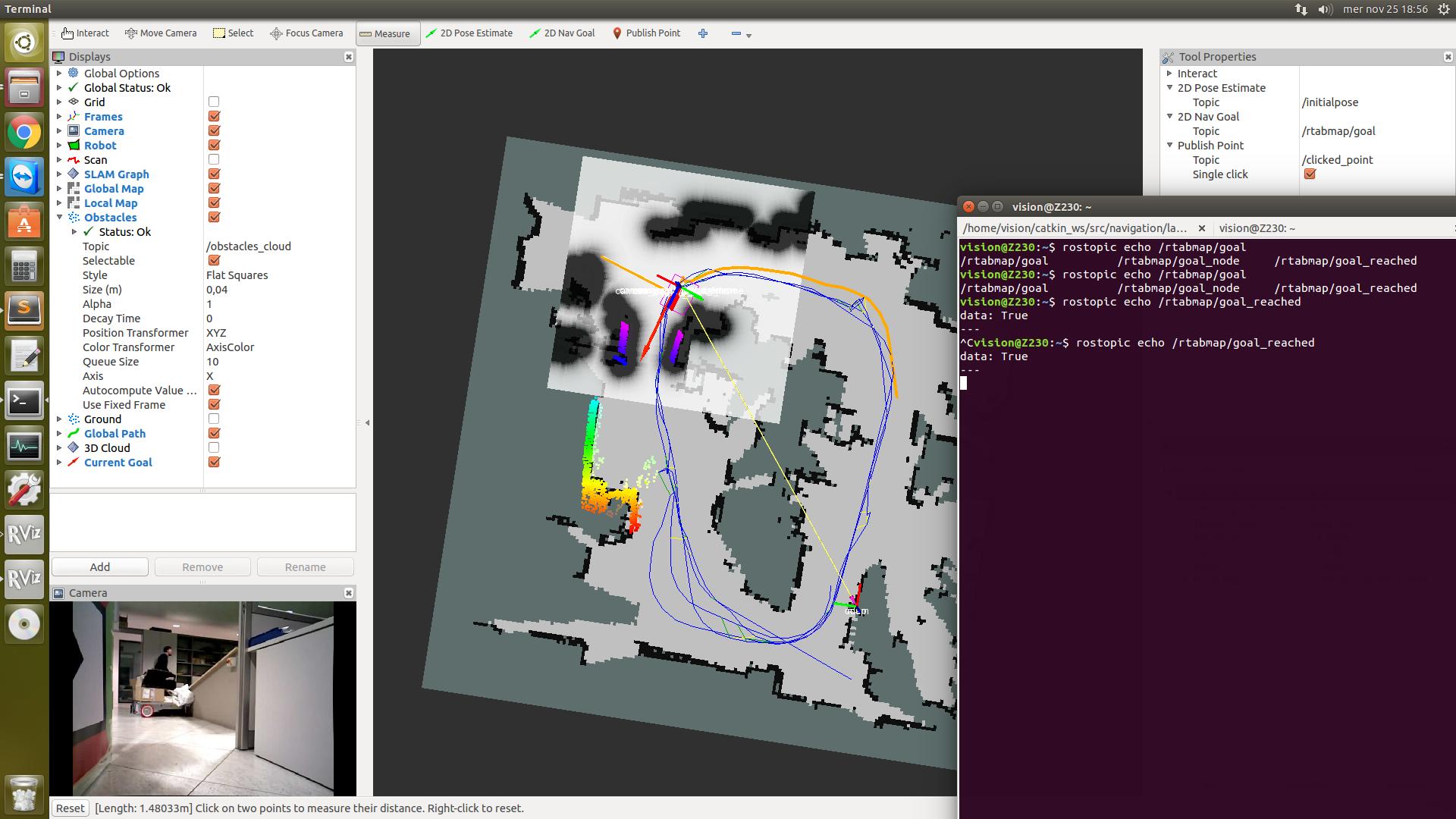
You can look if rtabmap tells if the goal is reached:
$rostopic echo rtabmap/goal_reached
By default, the goal radius is 50 cm. When you set a goal near the graph, rtabmap will make the robot moving to the nearest node on the graph, then when reached, send the pose to the actual goal. If the final goal is already inside the 50 cm, rtabmap will not publish the new pose to move_base, telling that the goal is reached. You can decrease the radius with the following parameter:
$ rosrun rtabmap_ros rtabmap --params | grep Goal
Param: RGBD/GoalReachedRadius = "0.5" [Goal reached radius (m).]
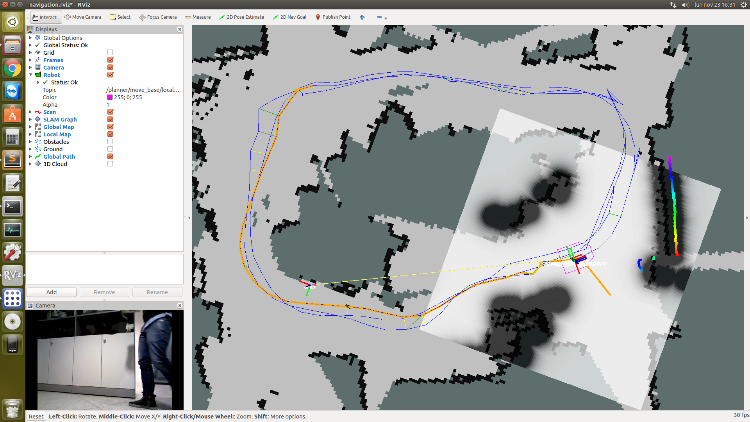
If the goal is actually sent to move_base, I don't really know why move_base wouldn't try to compute a plan to reach it (see the terminal for possible warnings).
cheers