Hi,
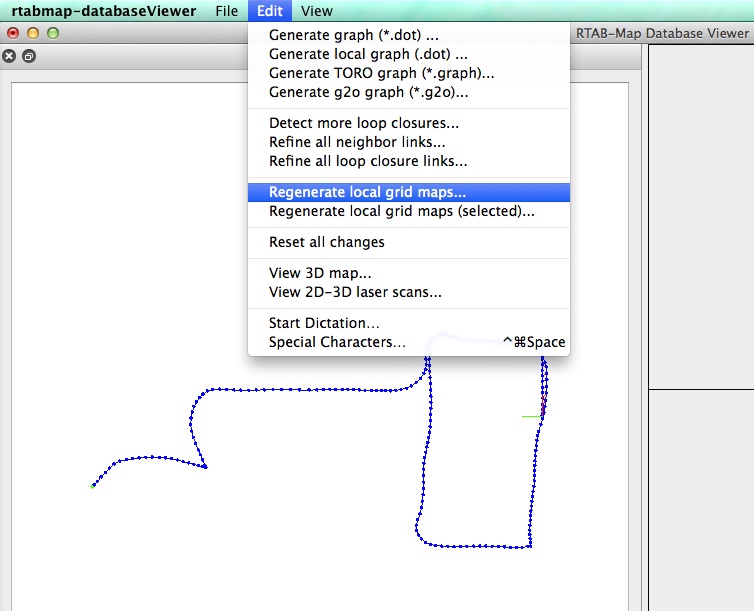
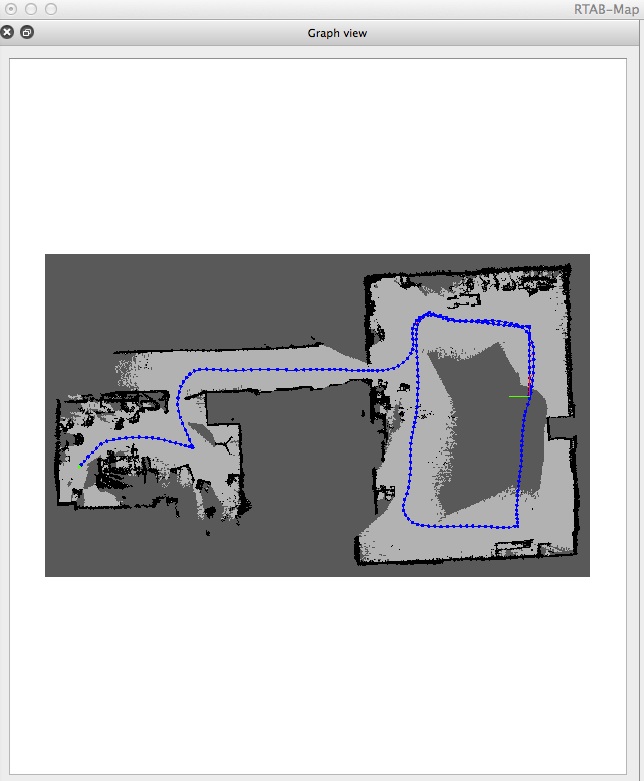
Since 0.11.11, 2D occupancy grid maps are not regenerated every time we reload the map. To visualize them, we must explicitly regenerate them in DatabaseViewer. Here is an example with an old database of the Multi-Session tutorial:
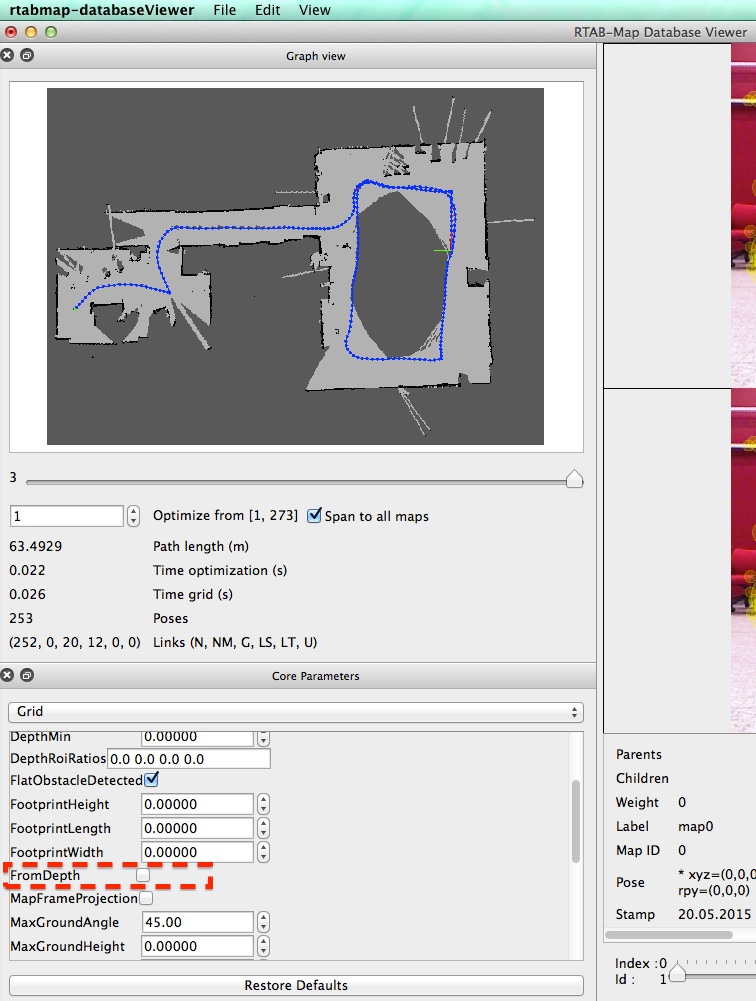
If you want to reconstruct with laser scans, uncheck Grid/FromDepth parameter:
As the database version is <0.11.11, you won't be able to save the occupancy grid back in the database. Note that the ROS wrapper will still regenerate automatically the 2D maps when detecting an old database version.
To migrate an old database format to a new one, the only way now is to create a new database in rtabmap, then start a new mapping session with your old database as source. The new database will have the new format (occupancy grids saved in database).
cheers,
Mathieu

