Dear People,
I have a
rgb and
lidar picture set where they are loaded into a node to create the topics for the
rgbd_sync,
rgbd_odometry and
rtabmap_rosThe lidar data is taken each 0.1 of sec whereas the rgb is taken every second, but the data where synchronized. When I run the
roslauch file I get lots of errors like:
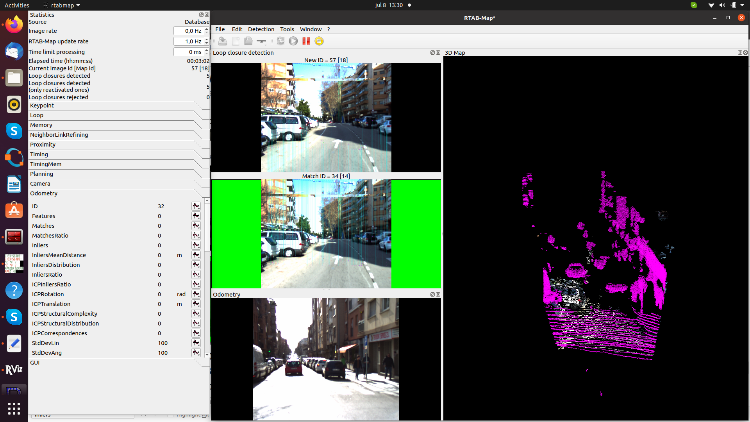
Registration failed: "Not enough inliers 0/20 (matches=108)RGB-D SLAM mode is enabled, memory is incremental but no odometry is providedI can see that I have matches but not inliers, I am confused between inliers and matches.
*What is the real mening between iliers and matches and how can I improve the inliers. Is there any parameter I can tune or I really need a better data set.
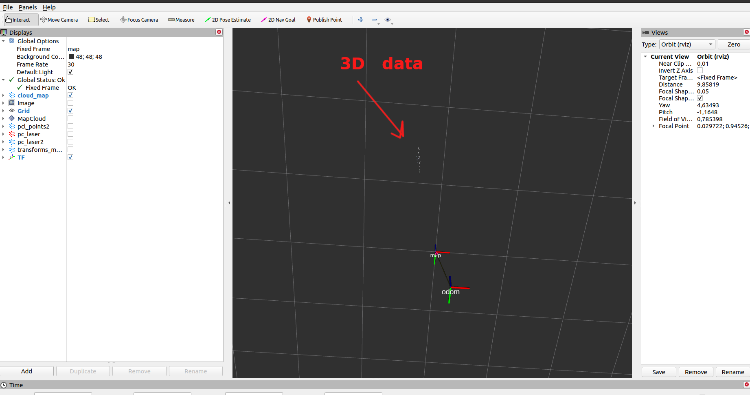
I just run rtabmap gui and it shows a 3D map in some pictures but I get weird data in rviz as you can see in the following pictures.
I also send a
rtabmap_ros for you to take a look at the data set. Any clue or help is appreciate it :)