Hi,
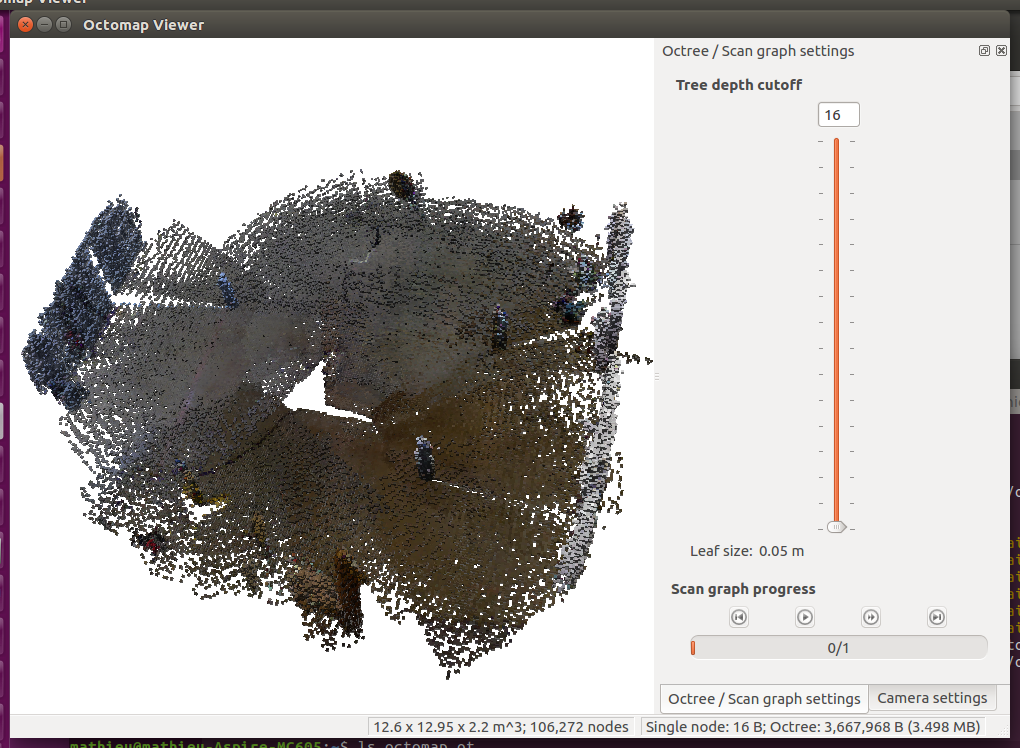
Assuming you are on ROS Kinetic, to just create an octomap from TUM's ground truth poses:
$ roscore
$ rosparam set use_sim_time true
$ roslaunch rtabmap_ros rtabmap.launch visual_odometry:=false odom_frame_id:=world frame_id:=kinect rgb_topic:=/camera/rgb/image_color \
depth_topic:=/camera/depth/image rtabmap_args:="--delete_db_on_start --Kp/MaxFeatures -1" rtabmapviz:=false rviz:=true
$ rosbag play --clock --pause rgbd_dataset_freiburg3_long_office_household.bag
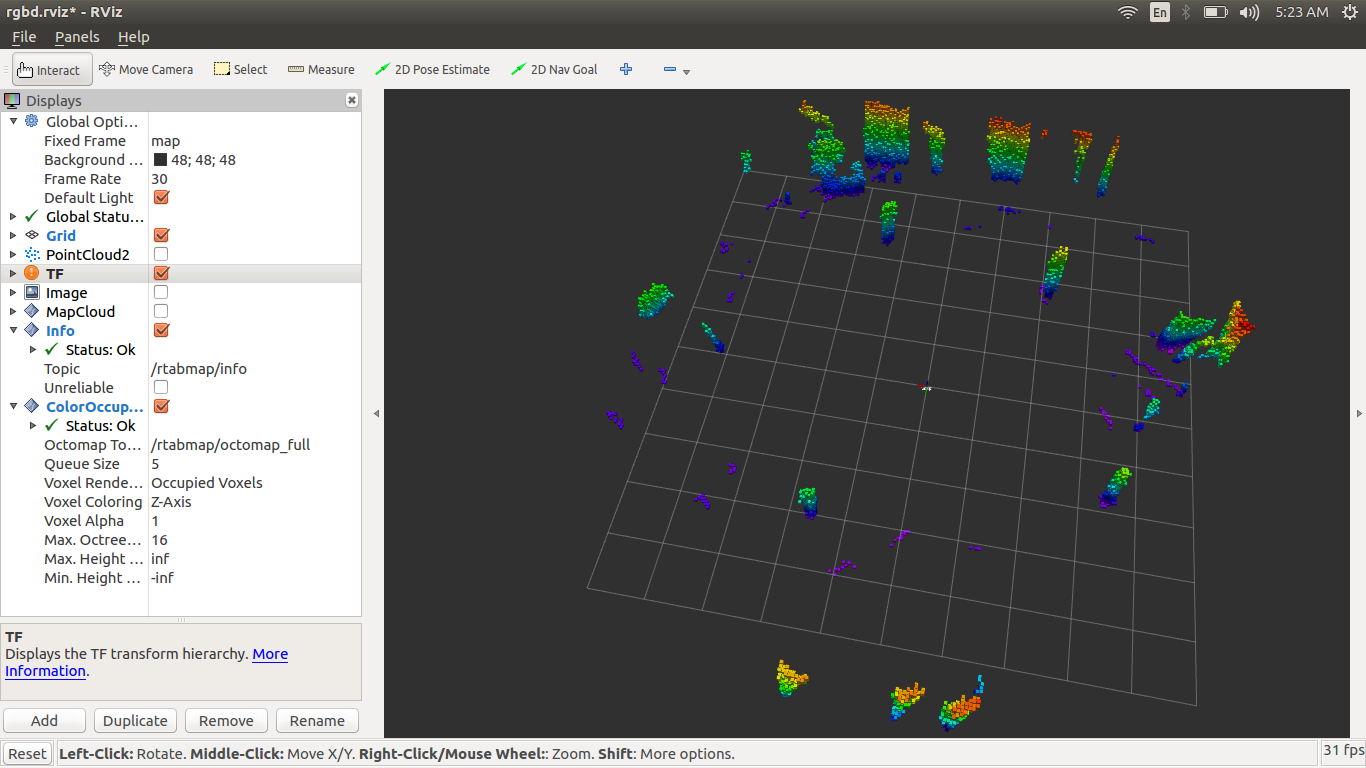
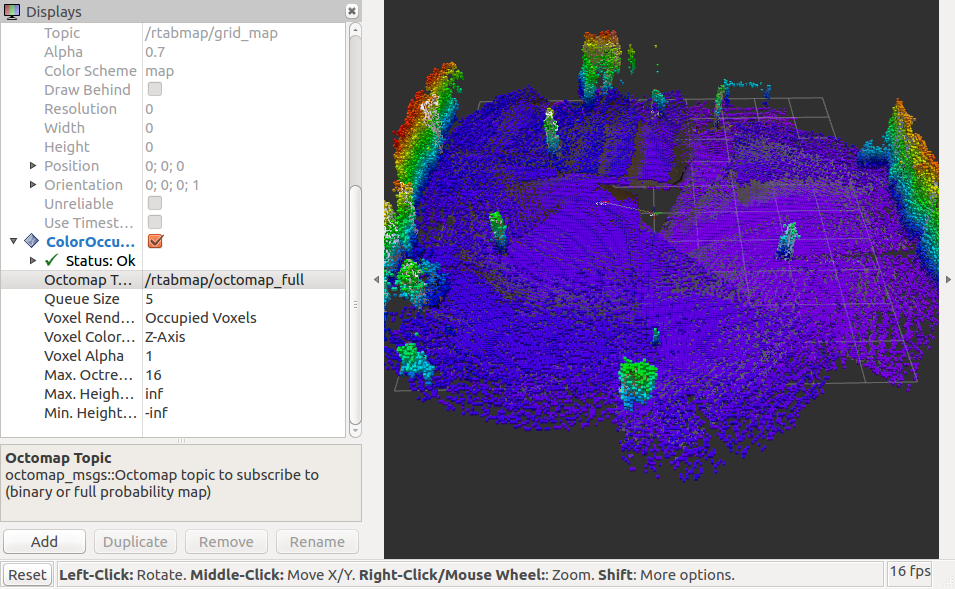
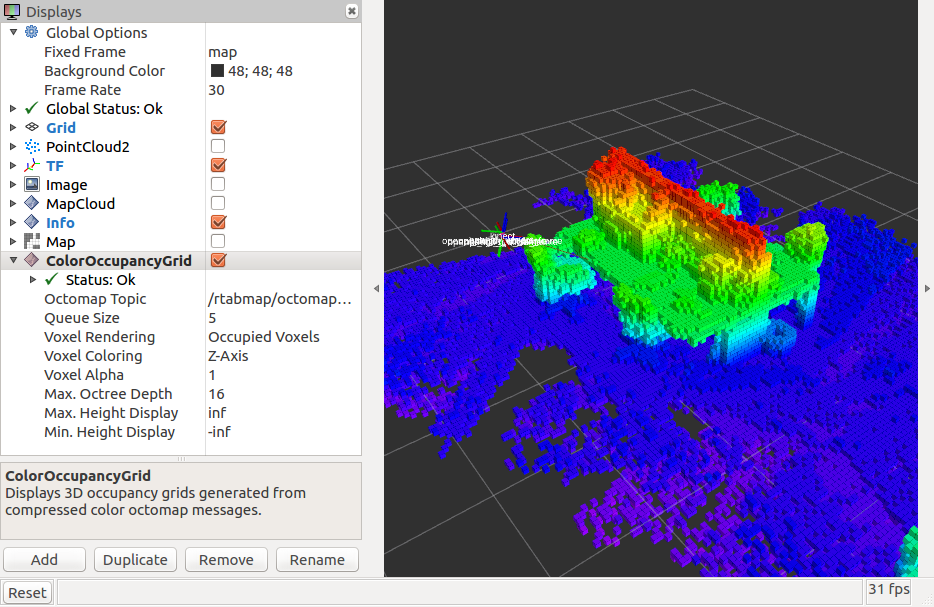
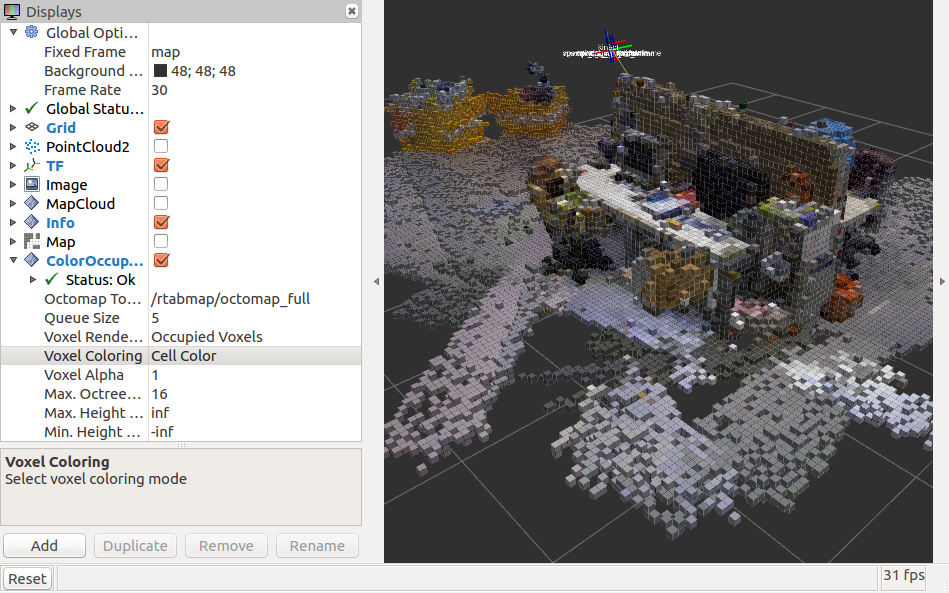
Visual odometry and loop closure detection are disabled. You may have to build
octomap_rviz_plugins from source to get ColorOccupancyGrid plugin working with rtabmap's octomap outputs:
cheers,
Mathieu