Hi,
I'm trying to obtain an Octomap (octree/ColorOccupancyGrid/etc) topic from RTABMap ROS but it does not appear in the ROS topic list. I am following this script:
$ roscore
$ rosparam set use_sim_time true
$ roslaunch rtabmap_ros rtabmap.launch visual_odometry:=false odom_frame_id:=world frame_id:=kinect rgb_topic:=/camera/rgb/image_color \
depth_topic:=/camera/depth/image rtabmap_args:="--delete_db_on_start --Kp/MaxFeatures -1" rtabmapviz:=false rviz:=true
$ rosbag play --clock --pause rgbd_dataset_freiburg3_long_office_household.bag
exactly as cited in this (
http://official-rtab-map-forum.206.s1.nabble.com/Octomap-in-RTAB-Map-td4302.html ) thread.
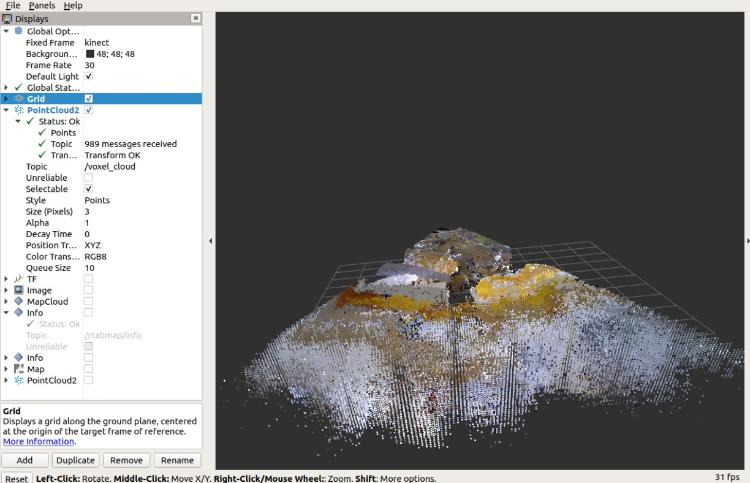
As seen in RVIZ:
I get data in the voxel_cloud topic:
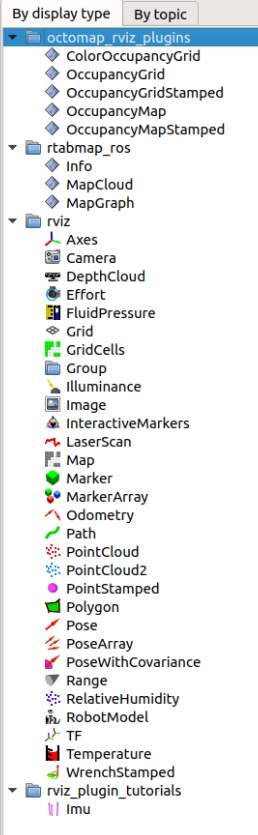
and the ColorOccupancyGrid viewer can be seen in the RVIZ type list:
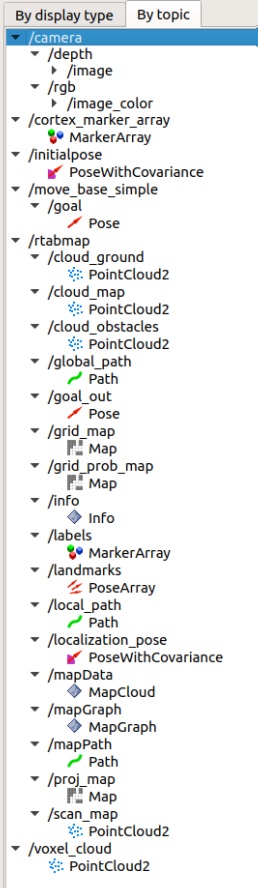
but nothing referring to Octabmap shows up in topics and none of the topics appear to be an octree kind of structure:
I've built from the latest sources, no errors are thrown, data does appear, just no Octomap topics. I've combed through the source and found the ifdefs and as far as I can tell it's including the rtabmap_octomap stuff. I've visited many sites and topics and tried many examples. Of course maybe the Octomap data is there under a new name and I just don't know what I'm looking at. Eiher way, totally stuck. Thanks in advance for taking a look.
- Telemething

