Hello,
I am using a Windows standalone version of RTAB-MAP.
Thanks so much for your efforts on it.
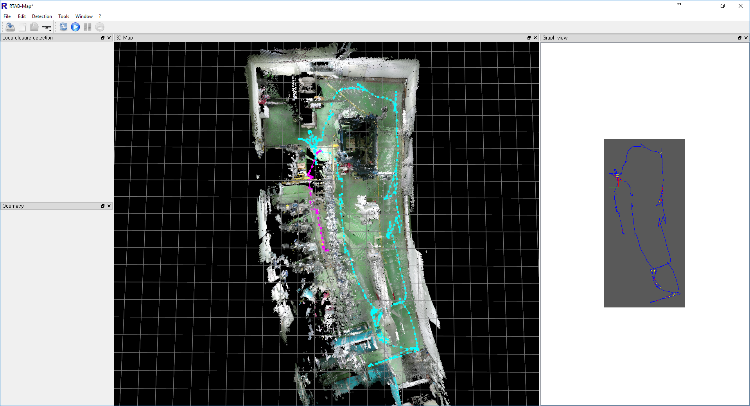
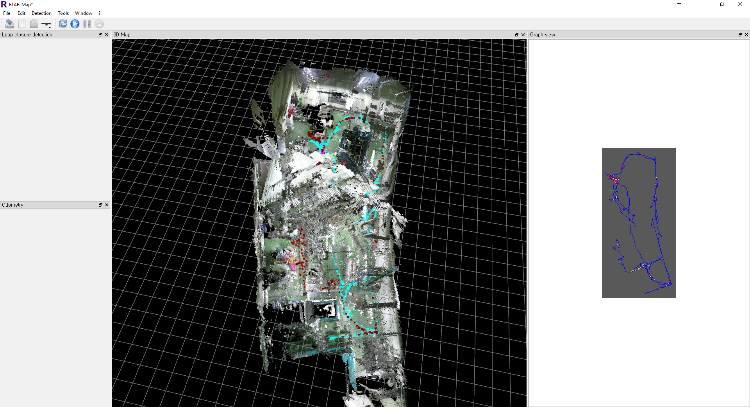
Here are two captures of scanned databases.
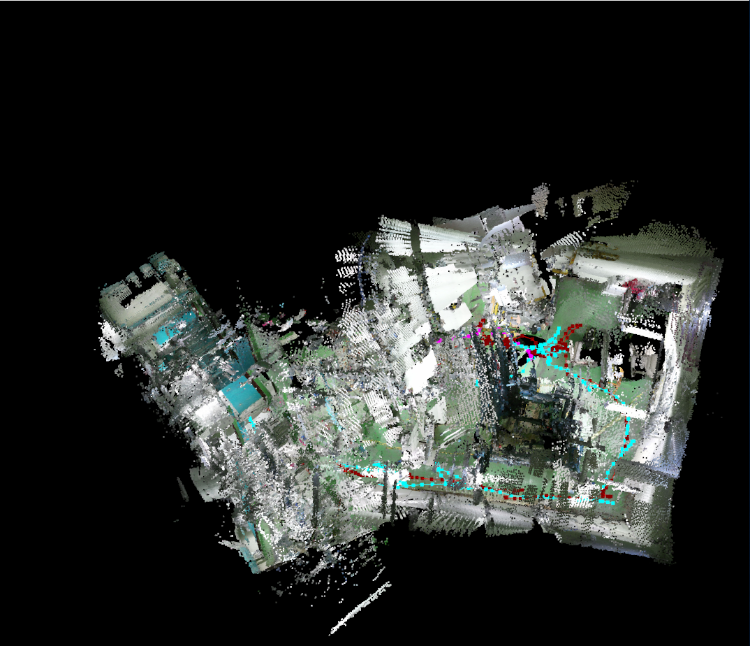
I scanned first round of whole room, and then closed the database and saved it. For safety, I copied the 1st database and renamed it.
Then, I opened the 1st database to continuously scan second round of the room.
But, as you can see, the second database is seems like without global optimization. I am sure I opened the database in global optimization mode.
I think that maybe I have done some mistakes during storing, because sometime my second saved database is fine. In that case, my third round scanned database has problem.
Is there any clue on it? Thanks so much~
Have a nice day.