Just saw this
post about a car with an os1-64 lidar driving under the rain in San Francisco. They provide the rosbag of the ouster:
rain_drive.bag. I've thought it would be nice to see rtabmap running on this public rosbag. I updated
rtabmap.launch to easily use the rosbag without modifications. Then based on the KITTI parameters of this
paper and making sure that rtabmap is built with
libpointmatcher support, we can do:
roslaunch rtabmap_ros rtabmap.launch \
use_sim_time:=true \
depth:=false \
subscribe_scan_cloud:=true \
frame_id:=os1_sensor \
scan_cloud_topic:=/os1_cloud_node/points \
scan_cloud_max_points:=131072 \
icp_odometry:=true \
approx_sync:=false \
args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 2 \
--Odom/ScanKeyFrameThr 0.8 \
--OdomF2M/ScanMaxSize 10000 \
--OdomF2M/ScanSubtractRadius 0.5 \
--Icp/PM true \
--Icp/VoxelSize 0.5 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 10 \
--Icp/PointToPlane false \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 1 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 0 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01"
$ rosbag play --clock --pause rain_drive.bag
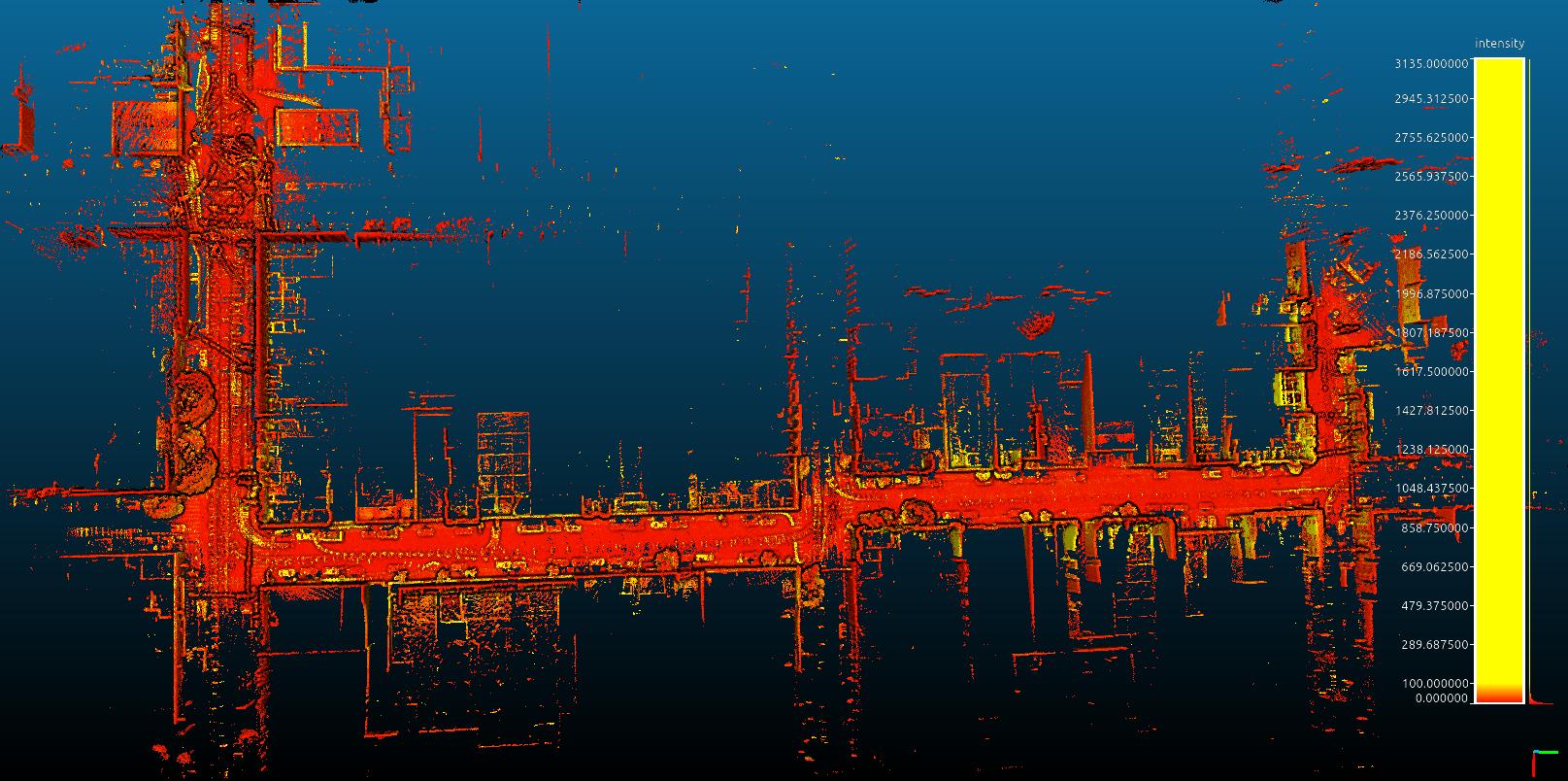
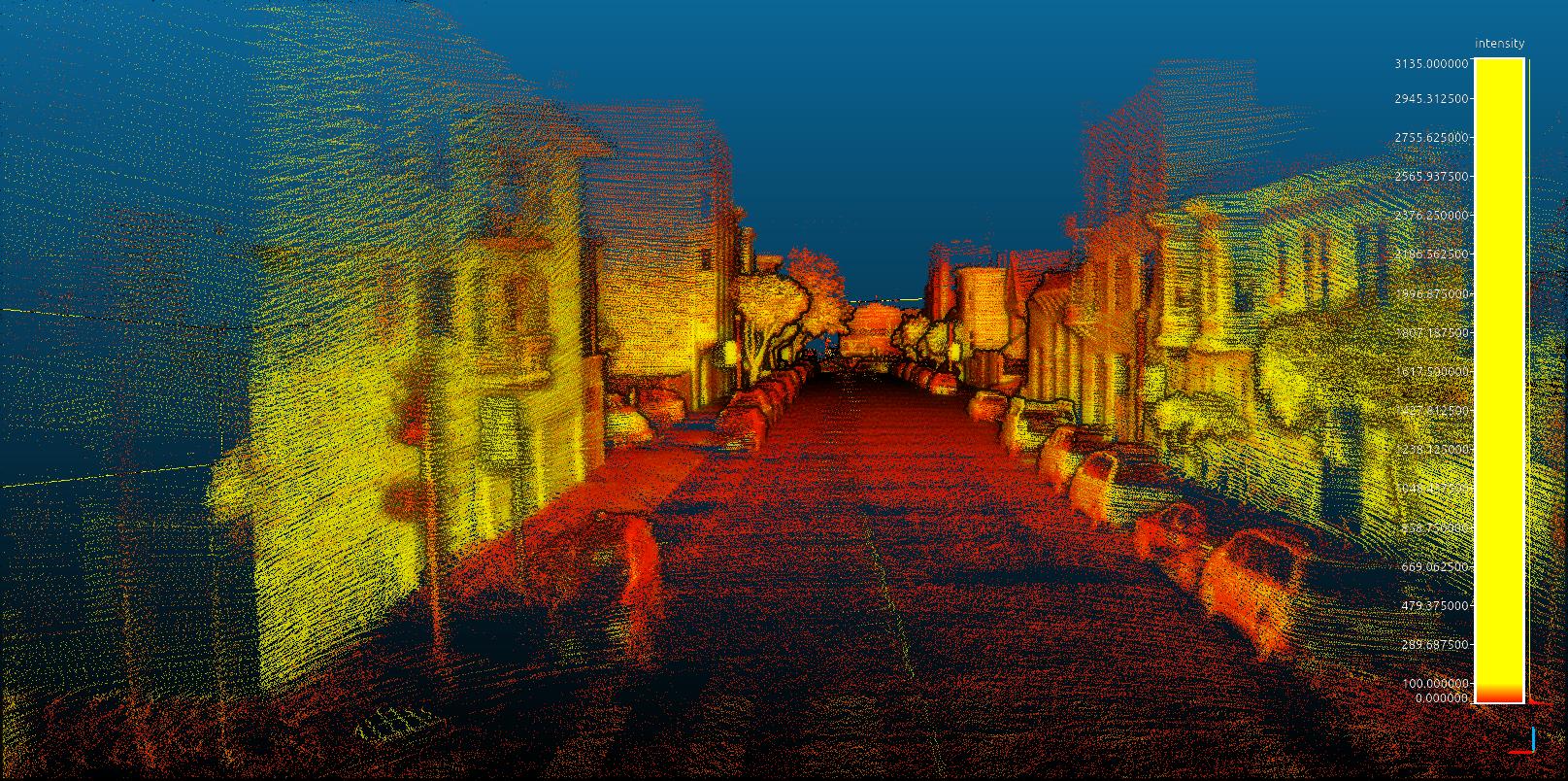
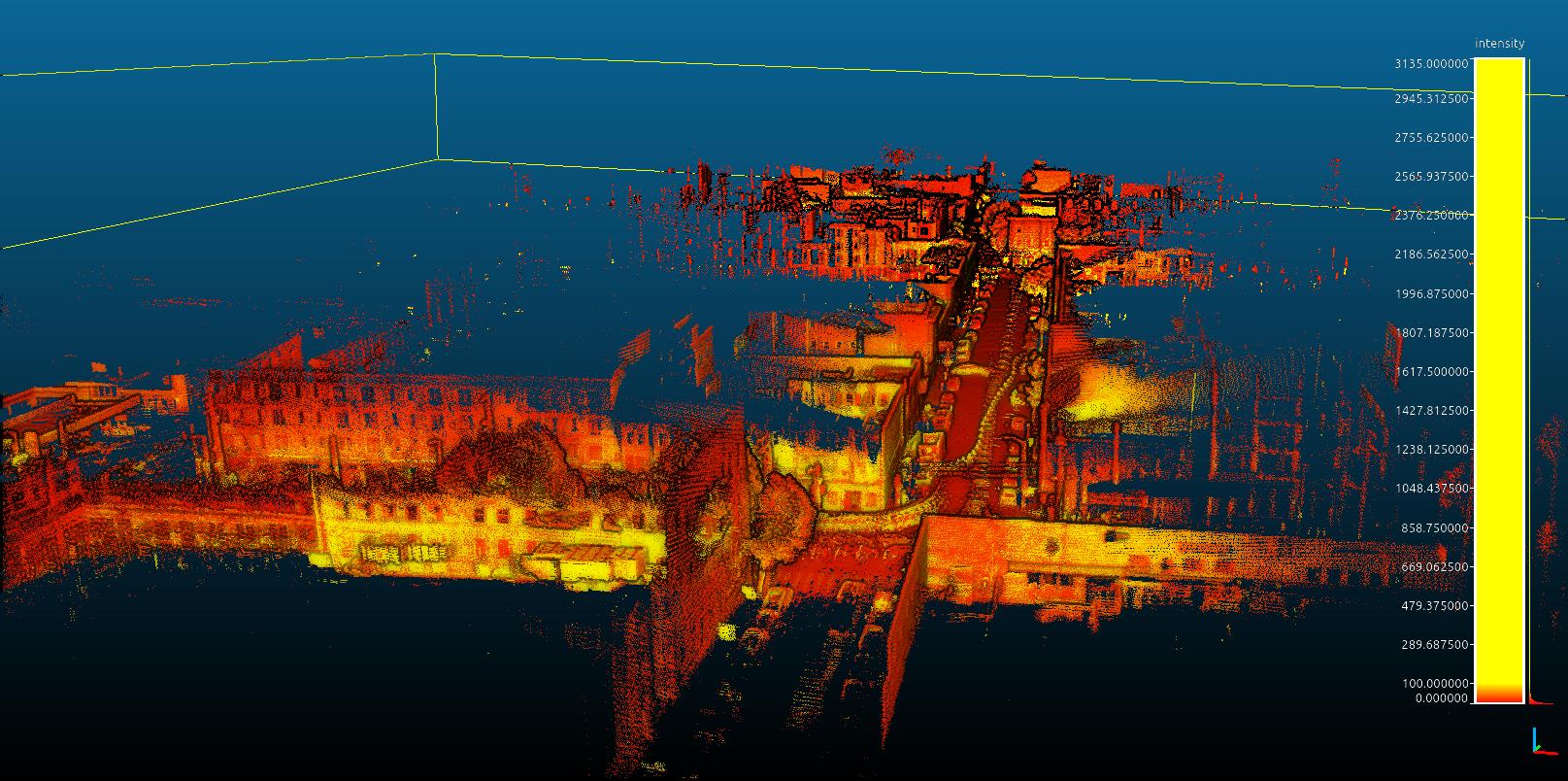
Before unpausing the bag, in rtabmapviz (just for rendering performance), go in Preferences->3D Rendering and set voxel size of 0.5 meters under Map and Odom columns under Laser scan section. in the main window, we can hit keys 1 to 6 to change color of the scan, by default it will use intensity in as gray scale. With latest rtabmap library version, we can right-click on the 3D View, under Scan menu, set maximum intensity to ~400 to better see the contrast of intensity.
After the mapping, we can export in high resolution the resulting clouds (File->Export 3D clouds...). Uncheck the first checkbox to assemble the scans and click on Regenerate clouds. There are some screenshots taken with
CloudCompare in EDL shading mode:
 EDIT: Loop closure detection
EDIT: Loop closure detectionNote that in this mode (only lidar), rtabmap won't do visual loop closure detection, so only small loops could be closed with proximity detection. For large scale mapping, we would need to add a stereo camera to this setup or use the ambient ouster images for loop closure detection (though we cannot do this right know as rtabmap is assuming pinhole camera models, not cylindric images).
EDIT 2Updated parameters above to match exactly those in this KITTI evaluation
script (S2M - PointToPoint, Table 3 in this
paper). Note that if you update rtabmap and rtabmap_ros to latest version (this
commit), we can now add
odom_args:="--Icp/DownsamplingStep 4" with ouster point clouds for a performance boost. On my laptop (XPS2019), I can get an average of 40 ms of computation time for odometry (instead of 49 ms), so mostly all ouster frames at 20 Hz can be processed online.
cheers,
Mathieu

