Thank you very much for the callbacks!
To precise my goal : I want to produce outdoor maps as accurate as possible while flying so the maps can be read afterwards by humans who can't go where the drone goes.
As I told you, I have some accuracy problems and I have some questions:
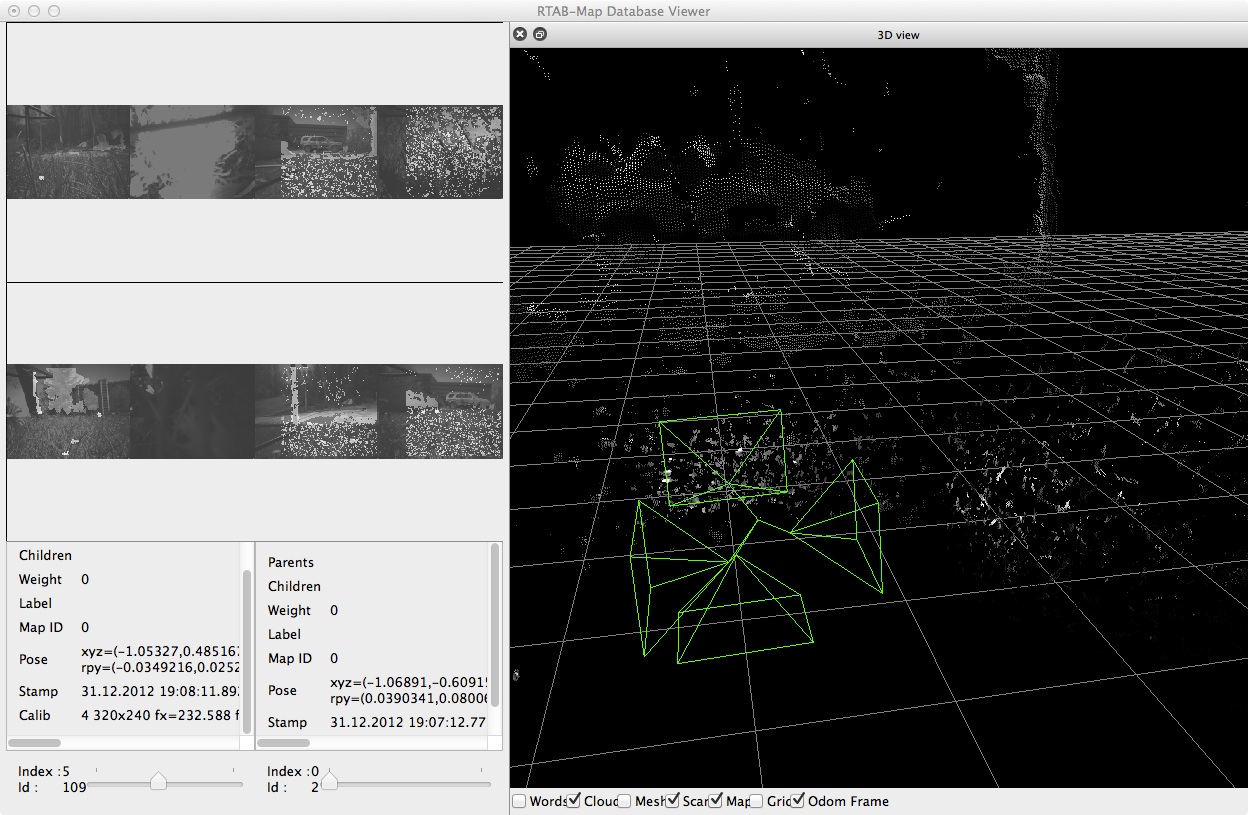
1- I have some noise in the pointclouds, is there a way to filter them in RTAB-map?
2- There are "holes" in the pointclouds if I walk too fast (quite slowly in fact), is it more likely related to the cameras frame rate (10Hz) or to RTAB-map update rate (?Hz) ?
3- Does outdoor lighting have an effect on the map quality?
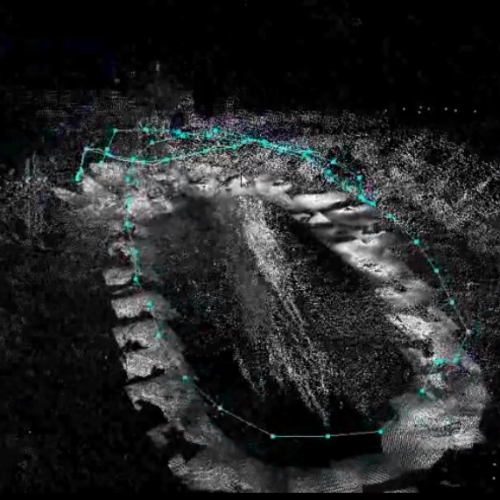
Here's what I can currently obtain. Have you an idea on the causes of this inaccuracy?

Thanks!
Pierre-Yves