Dear Mathieu,
Thank you very much for the reply.
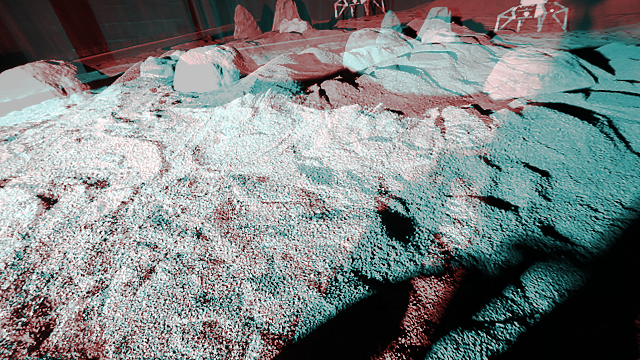
I know, that the images are very challenging and that there are only few good features that can be tracked among images. I attached a stereo image pair to show, what kind of images we are dealing with. The point of my research is exactly the fact, that it is difficult.


I am wondering, why the ROS 2 version does not immediately loose the odometry. I suspect, that it does multiple attempts to reset the odometry before it gives up and declares that it lost the odometry, am I right?
When I use the "--Odom/ResetCountdown 1", is there any trace in the output data, that the odometry was lost? It would be good to know, how many times it had to reset its position along a certain trajectory.
Please let me know, if I can provide any further details.
With kind regards,
Dave
P.S.
I'd like not to put the entire dataset online as it has been submitted for review in a journal, and we are waiting for a reply from the reviewers. I could share it with you privately if you like. I could send you a link vie email if you agree with that. Please let me know.