Hi Mathieu,
I am constantly getting the below error when mapping indoors in well structured environments
Ignoring local loop closure with 205 because resulting transform is to large!?
and
Rtabmap.cpp:1831::process() Rejected loop closure 121 -> 137: Not enough inliers 16/20 (matches=34) between 121 and 137
for many nodes.
I have recently switched the Lidar on the robot from Hokuyo short range to a long range SICK lidar (20 m, 50Hz). When running Gmapping with the robot I find no trouble. But with RTABMAP with the default demo_robot_mapping.launch file the map gets corrupted. I am using the following parameters. I believe that using a long range scanner with high update rate should produce better scan matching for ICP. I am not sure what parameters are wrong.
<!-- RTAB-Map's parameters: do "rosrun rtabmap rtabmap (double-dash)params" to see the list of available parameters. -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/> <!-- Do odometry correction with consecutive laser scans -->
<param name="RGBD/ProximityBySpace" type="string" value="true"/> <!-- Local loop closure detection (using estimated position) with locations in WM -->
<param name="RGBD/ProximityByTime" type="string" value="false"/> <!-- Local loop closure detection with locations in STM -->
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="10"/> <!-- Do also proximity detection by space by merging close scans together. -->
<param name="Reg/Strategy" type="string" value="1"/> <!-- 0=Visual, 1=ICP, 2=Visual+ICP -->
<param name="Vis/InlierDistance" type="string" value="0.1"/> <!-- 3D visual words correspondence distance -->
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/> <!-- Optimize graph from initial node so /map -> /odom transform will be generated -->
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Grid/FromDepth" type="string" value="false"/>
How can I improve the mapping results. With Hokuyo I never had this trouble. Also, when I change
<param name="RGBD/LocalLoopDetectionTime" type="string" value="false"/>
to
true
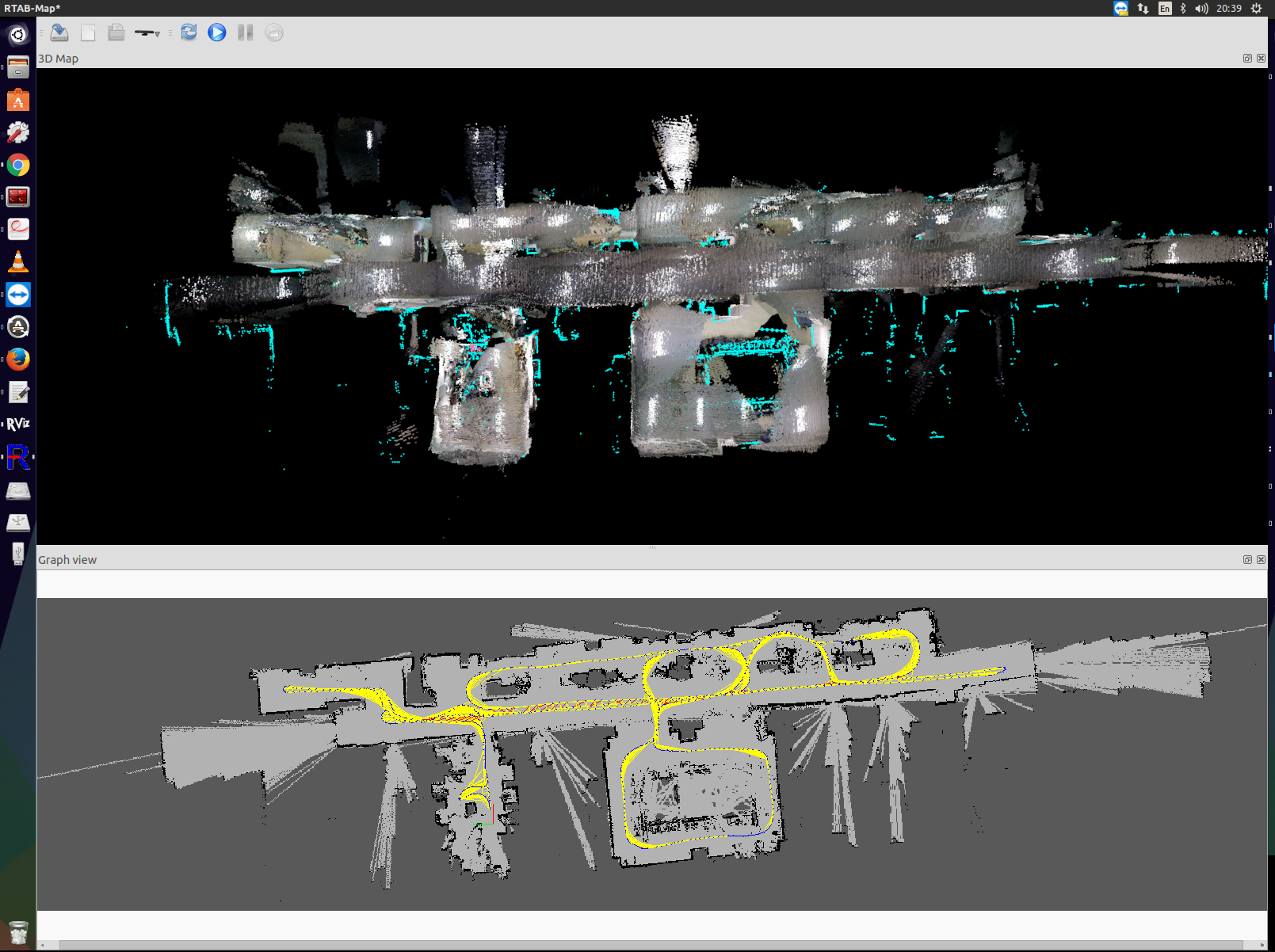
the results are slightly better. But the grid map does not look so good. You can see in the map there are so many areas where the occupancy has not been filled for obstacles.
Results with RGBD/LocalLoopDetectionTime = True
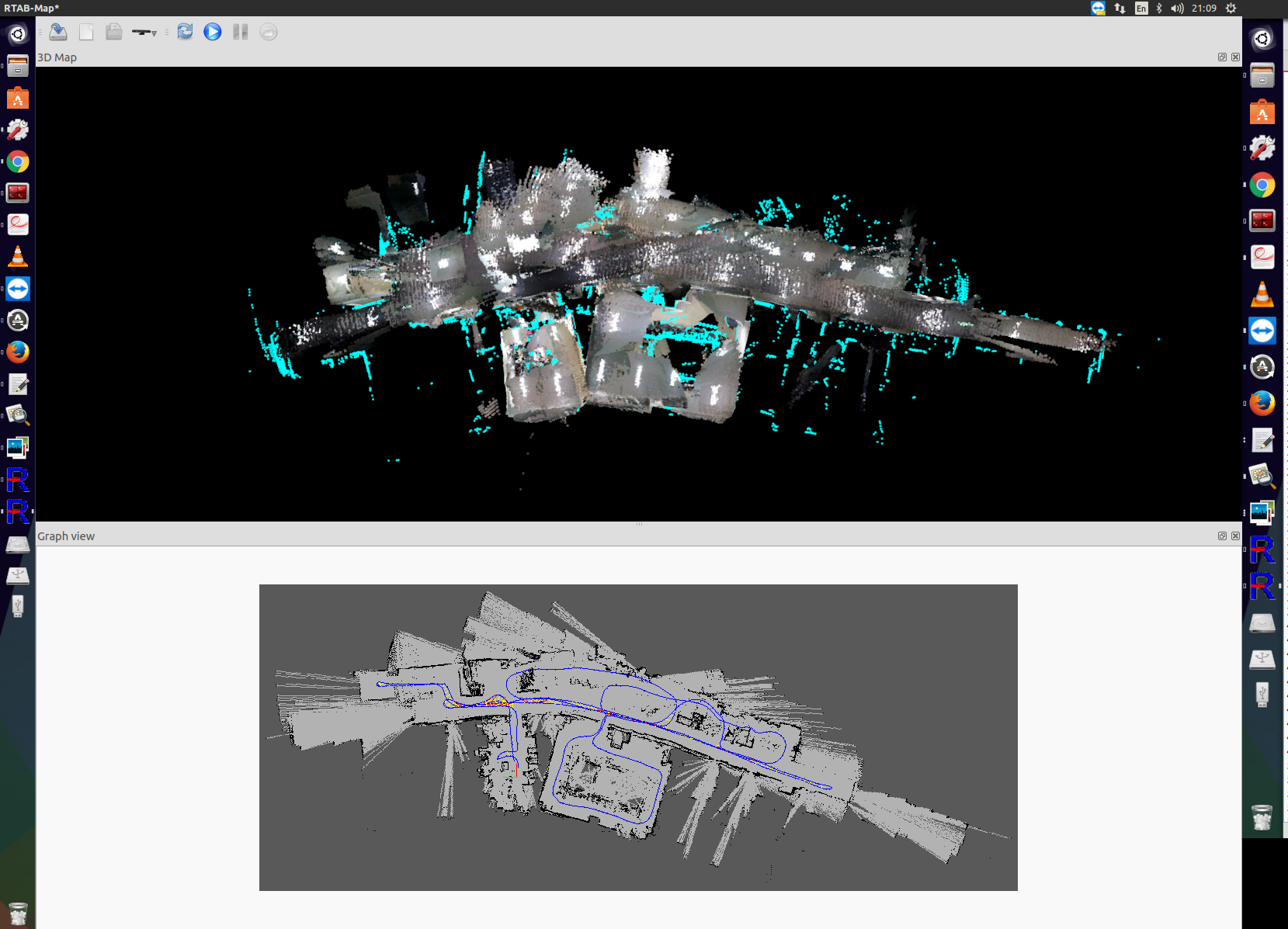
Results with RGBD/LocalLoopDetectionTime = False
Can you suggest something to improve the results. My final goal is to do multi-mapping session for such long environments.
Thanks
------
Alex

