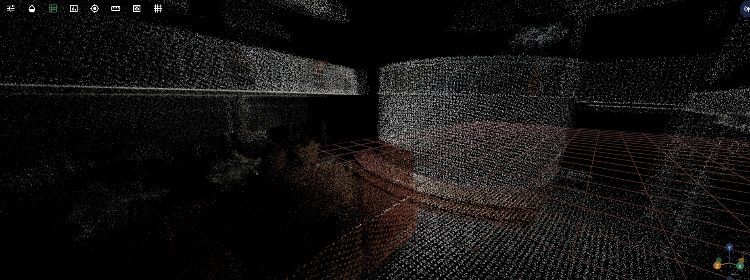
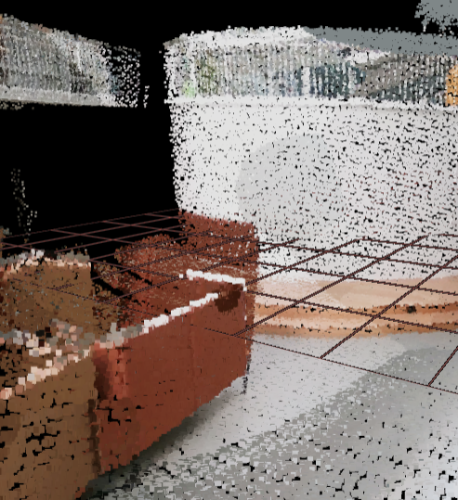
You can give a try with different values for "--cam_projection_decimation" option. For each point, we search the best camera looking at it to attribute its color. If you have a sparse point cloud and high resolution image, the background points may be colored by foreground pixels. Here an example:
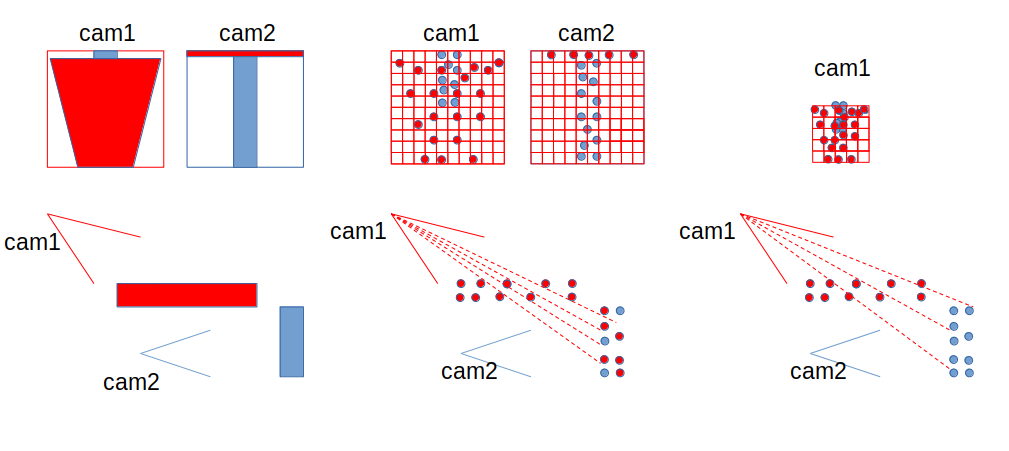
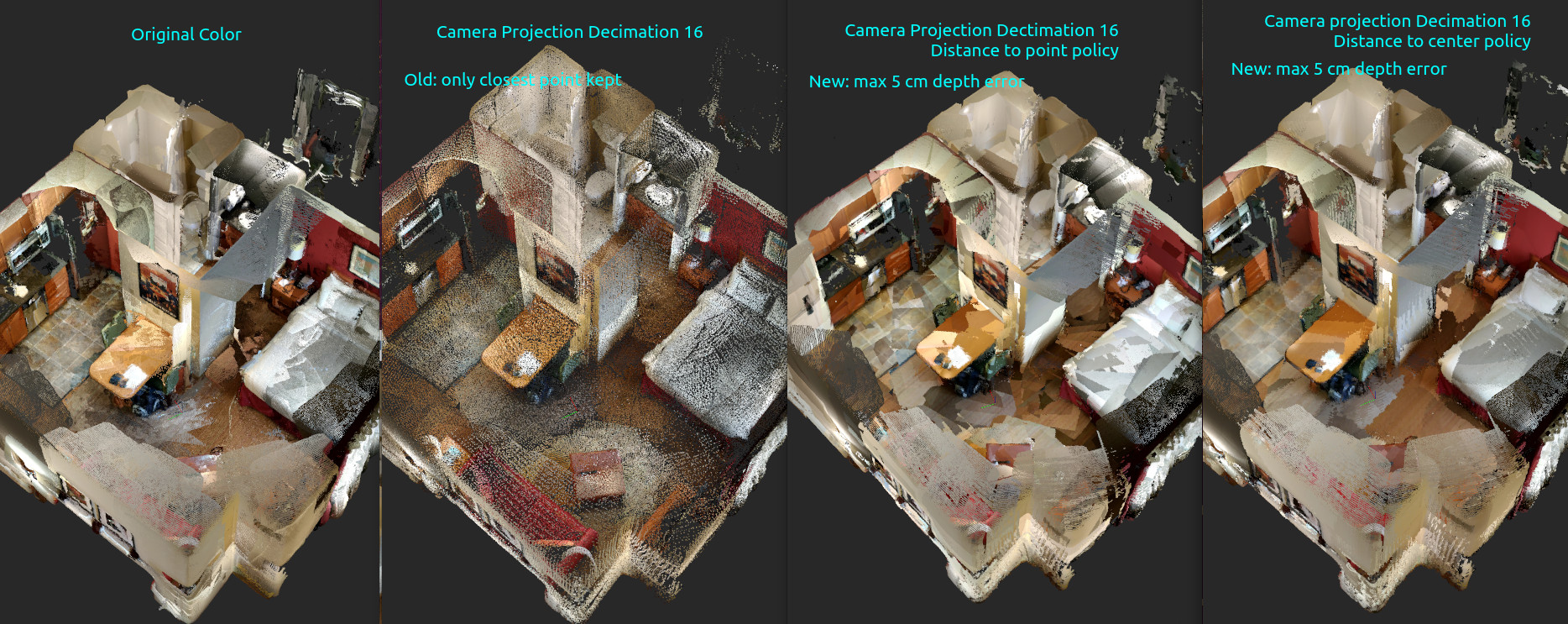
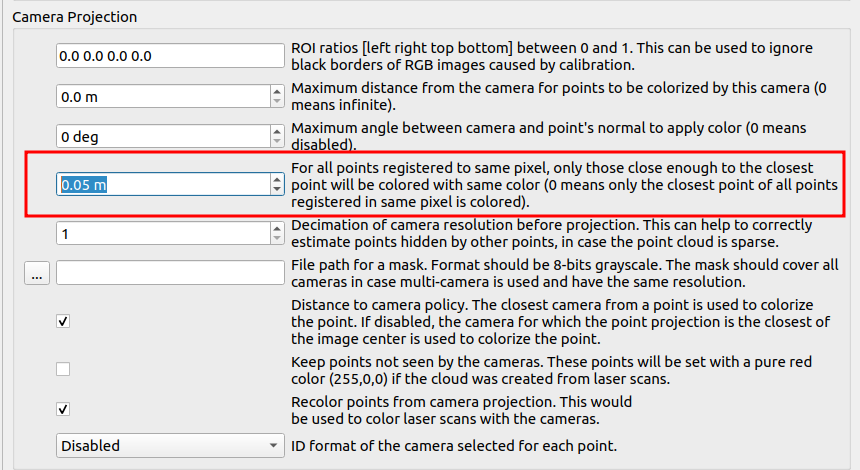
For the resolution setting, let's look at cam1 first (ignore cam2). On the left is the setup, the cam1 sees the top of the red table but cannot see most of the blue box under it. In the middle is how looks like the sparse point cloud if we project it on cam1. For each pixel, we color only the closest point projected in that pixel. Because the point cloud is sparse, some background points are "seen" in the camera, so some points of the blue box will be colored red. On the right, we decimated the camera image by 2, thus for all red pixels, there is a point on the table in them, so the background blue points are ignored by cam1.
The cam2 example is there to show the other option about the distance to cam policy ("--texture_d2c" option). In that case, most blue points are seen by cam2, even if some are seen by cam1 (at high resolution), they will still be colored by cam2.
cheers,
Mathieu