Hi guys !
Can anyone tell me how i can improve the 3D reconstruction of my pointcloud ? My robot is visiting pipes and i would like to obtain a proper 3D cloud of it. It seems like local maps aren't proprely assembled in the global map. Any ideas ?
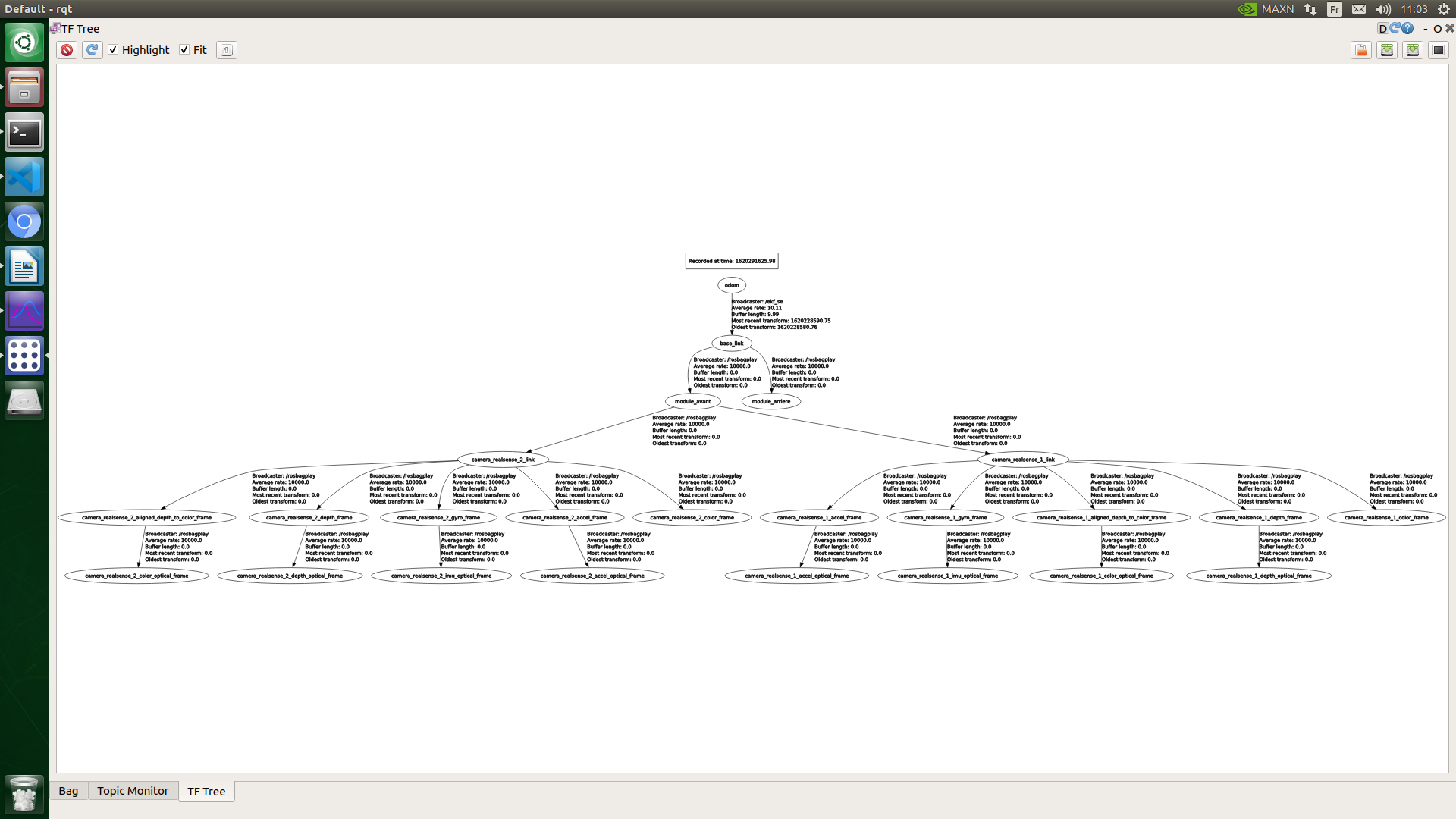
The odometry is correct : i made a round trip as a benchmark for the rgbd_odometry. Is it something related with the camera frame and the robot frame ?
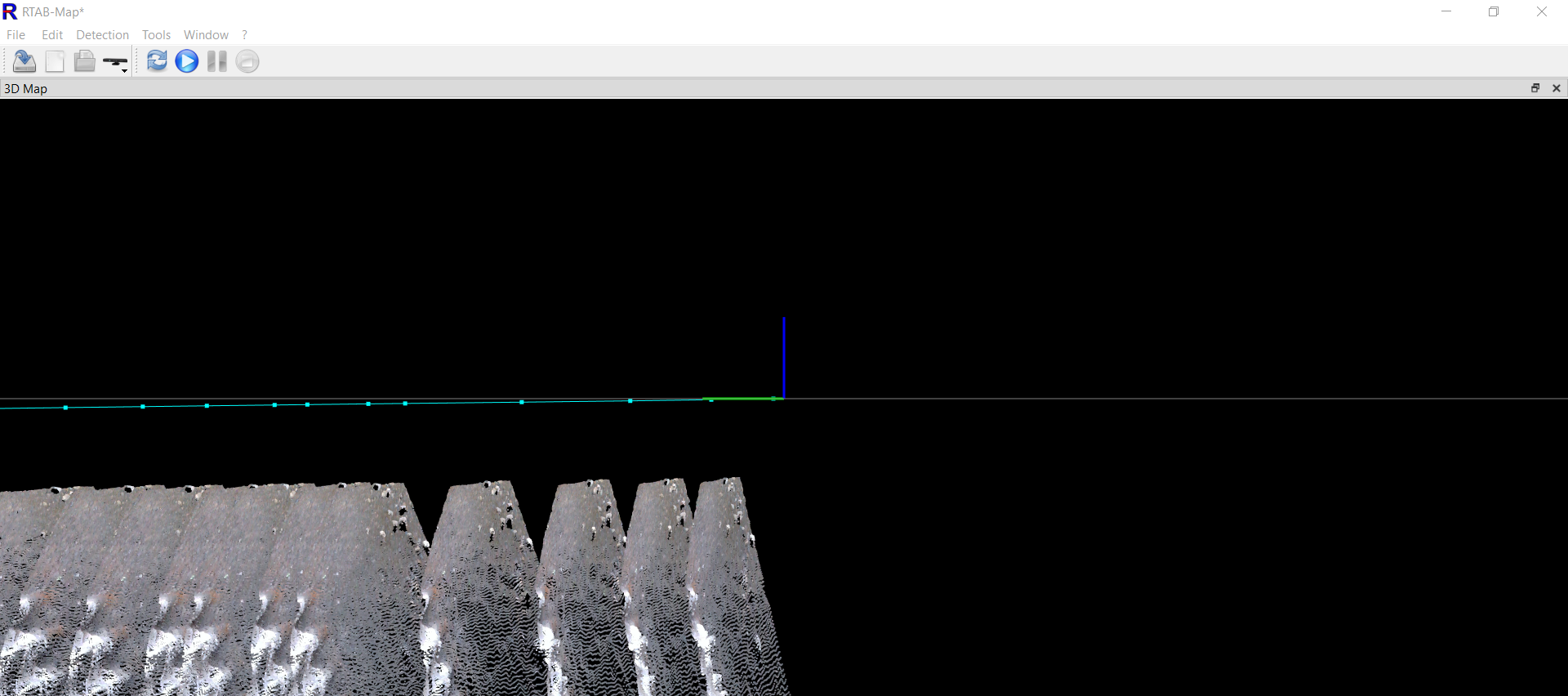
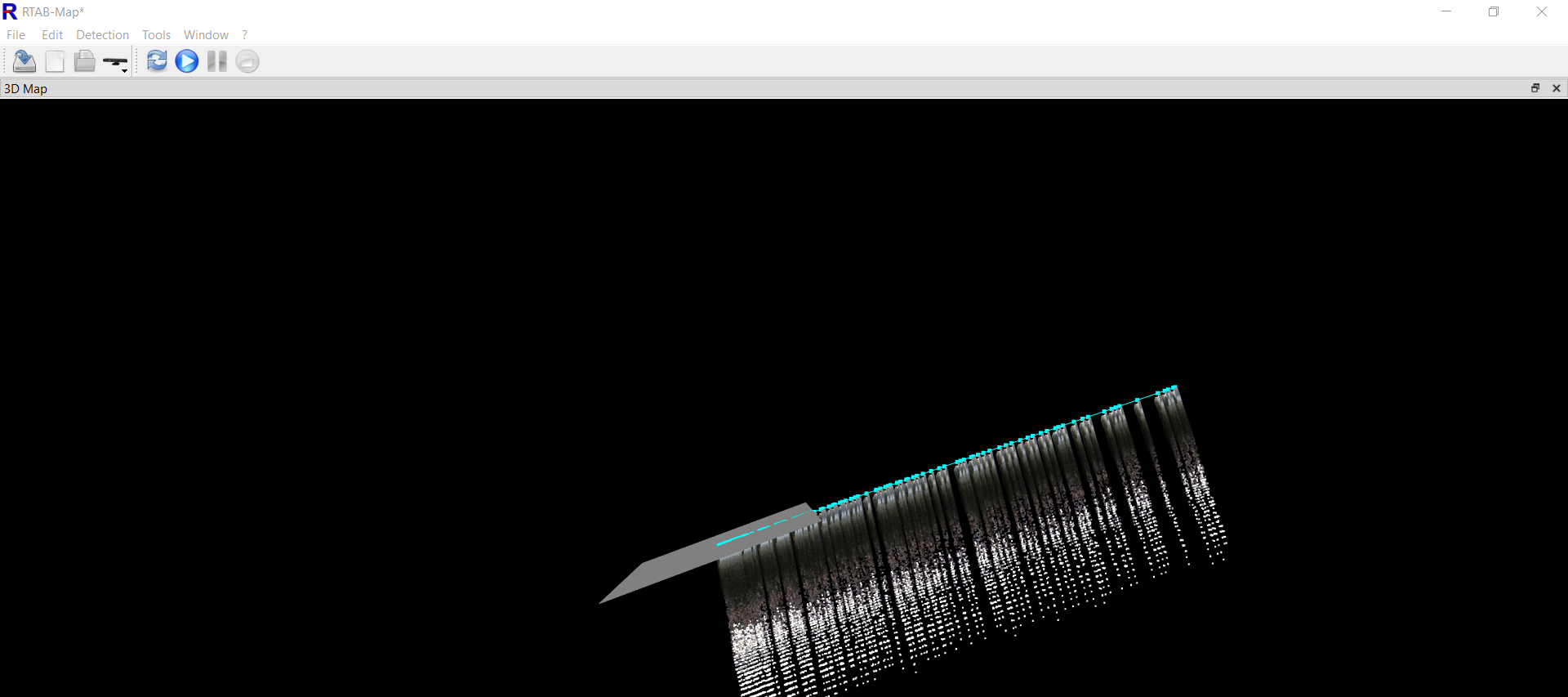
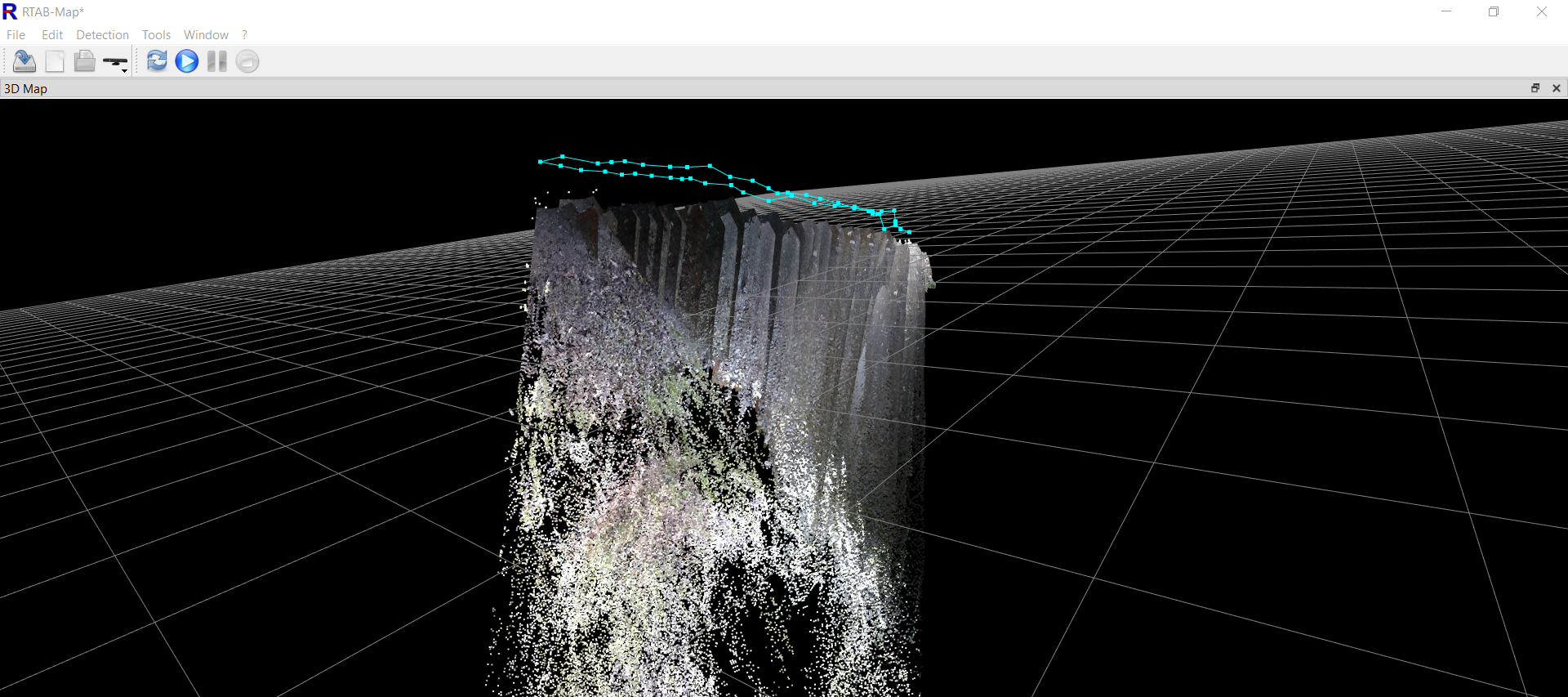
Two different pipes, yet it's the same issue.
I believe the problem is related with
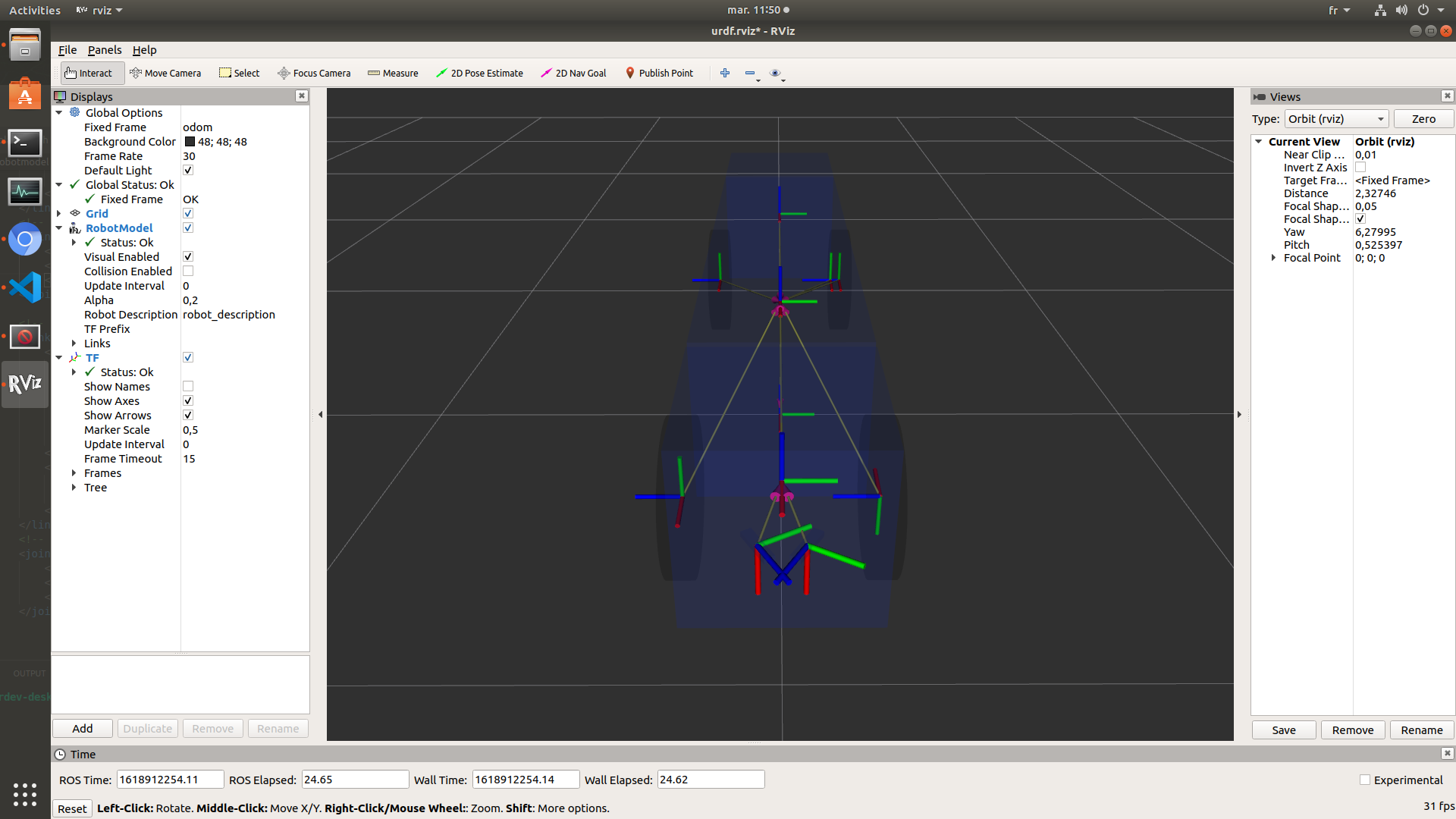
But I don't know how to solve it..
Thanks for your Help ;)