Hi Mercedes,
I think the problem is in the costmap_common_params.yaml. Instead of:
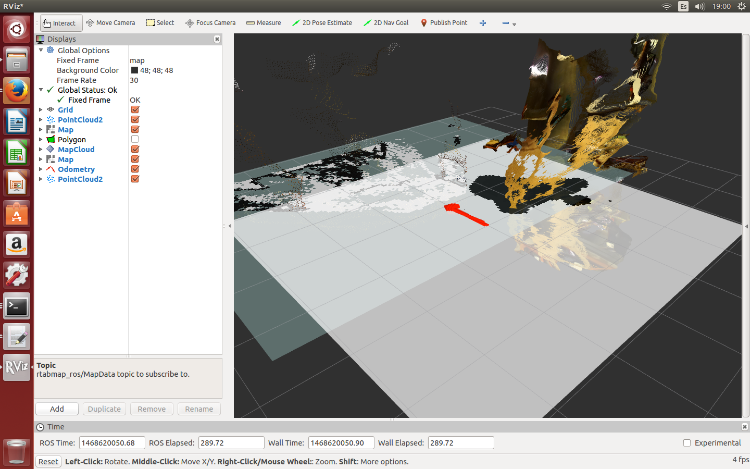
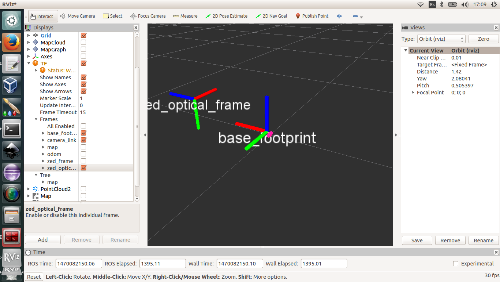
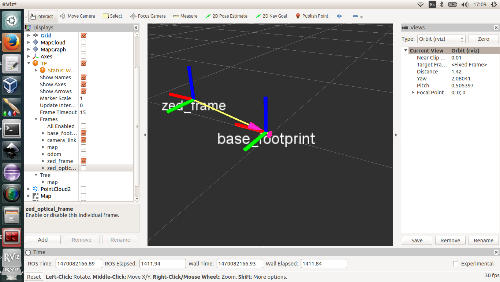
point_cloud_sensor: {sensor_frame: zed_frame, data_type: PointCloud2, topic: /zed/point_cloud/cloud , marking: true, clearing: true}
do:
point_cloud_sensor: {sensor_frame: base_footprint, data_type: PointCloud2, topic: /zed/point_cloud/cloud , marking: true, clearing: true}
i.e., use /base_footprint as sensor_frame instead of /zed_frame. That way the point cloud will be transformed in your robot frame.
cheers,
Mathieu