Hi Mathieu,
I successfully compiled the latest rtabmap from github on indigo: here the instruction I followed. Could be useful since there was some errors during compilation:
source /opt/ros/indigo/setup.bash
source ~/catkin_ws/devel/setup.bash
$ sudo apt-get install ros-kinetic-rtabmap ros-kinetic-rtabmap-ros
$ sudo apt-get remove ros-kinetic-rtabmap ros-kinetic-rtabmap-ros
$ cd ~
$ git clone https://github.com/introlab/rtabmap.git rtabmap
$ cd rtabmap/build
$ cmake -DCMAKE_INSTALL_PREFIX=~/catkin_ws/devel .. [<---double dots included]
$ sudo dpkg -r --force-depends "libopenni-dev" && sudo apt-get install libopenni-dev
$ make -j2
$ sudo make install
[Install RTAB-Map ros-pkg in your src folder of your Catkin workspace.]
$ cd ~/catkin_ws
$ git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
$ catkin_make -j1
Everything is fine and now I'm able to set the max ground height as expected.
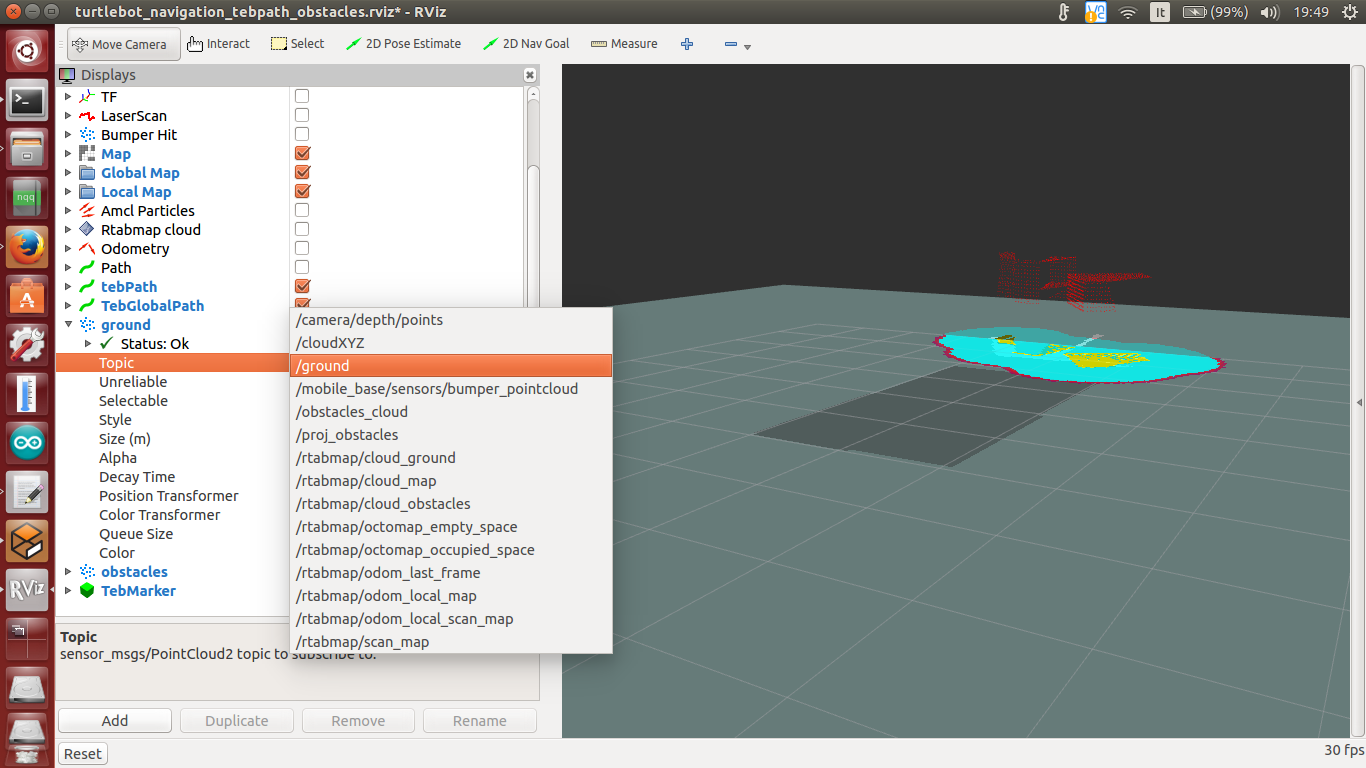
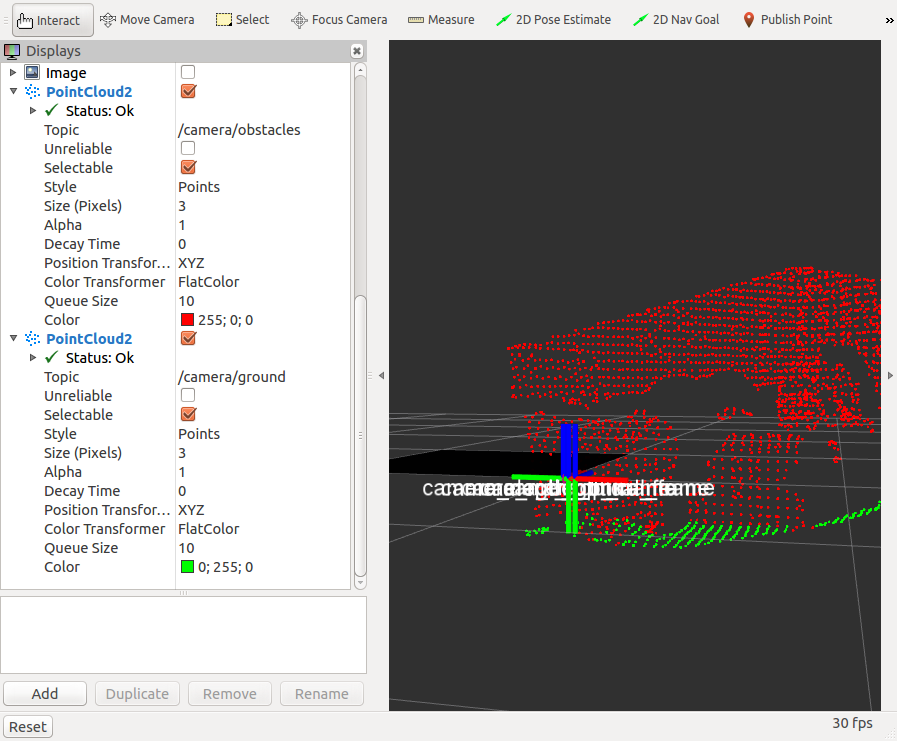
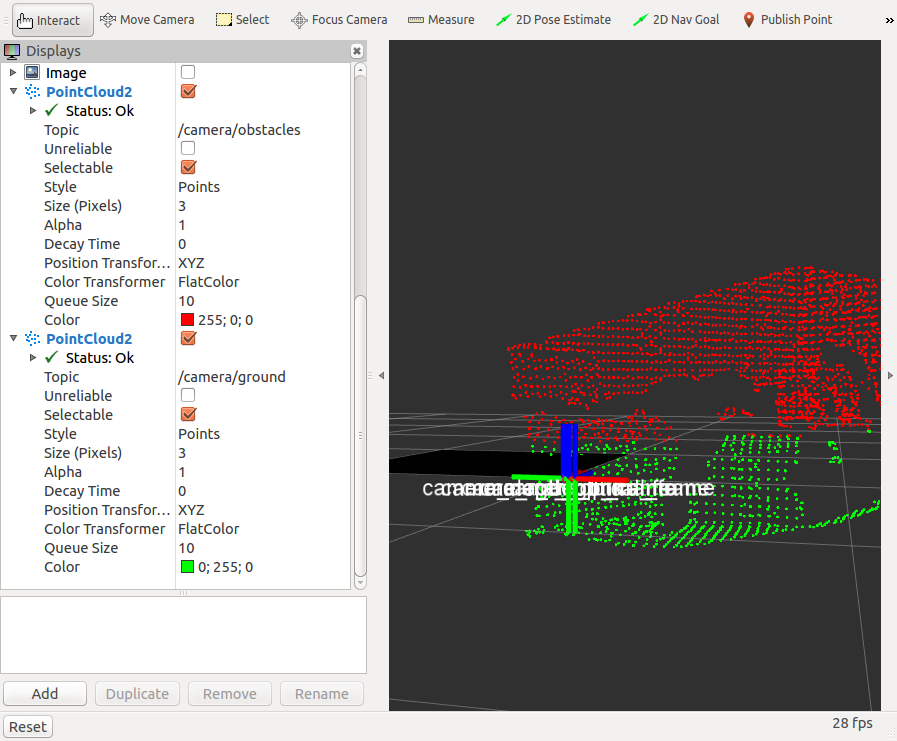
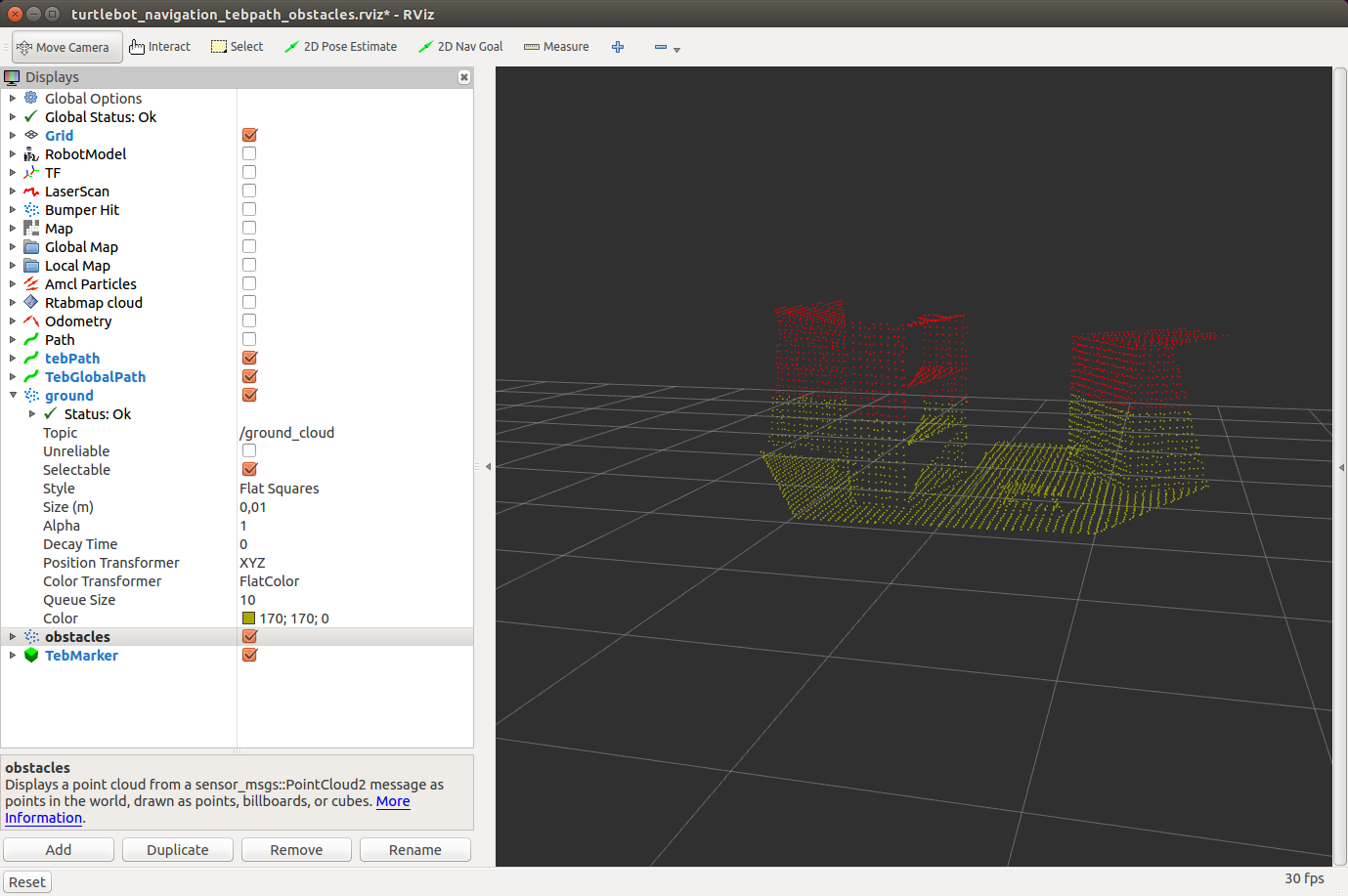
I found that is changed the ground cloud output topic of obstacles detection nodelet. The indigo compiled version was "ground" (and I mapped the output in this way " <remap from="ground" to="/ground_cloud"/> " but now no data coming out from /ground or /ground_cloud , only from the new topic "/rtabmap/cloud_ground" .
Seems strange 'cause obstacle cloud is still there without any modification. Did you change the output topic name of ground cloud in obstacles detection nodelet?
Thank you
Andrea