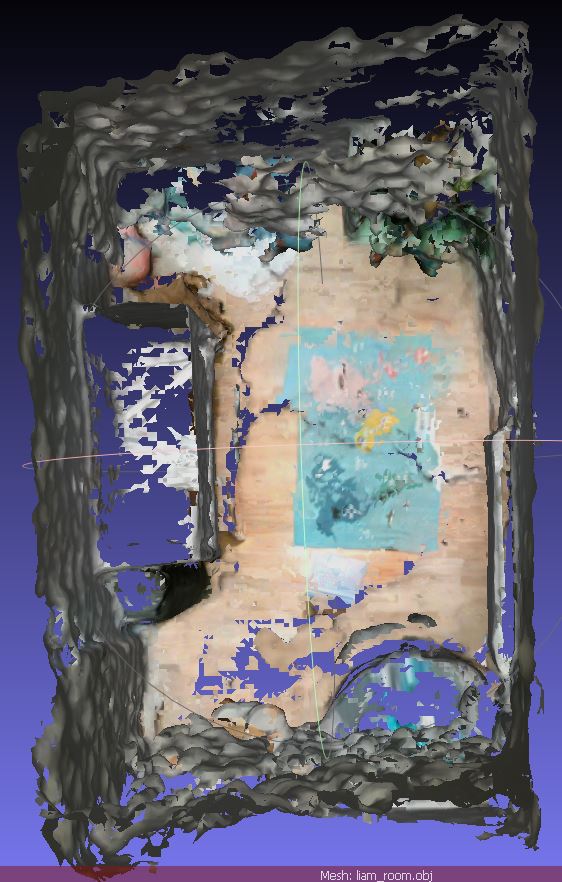
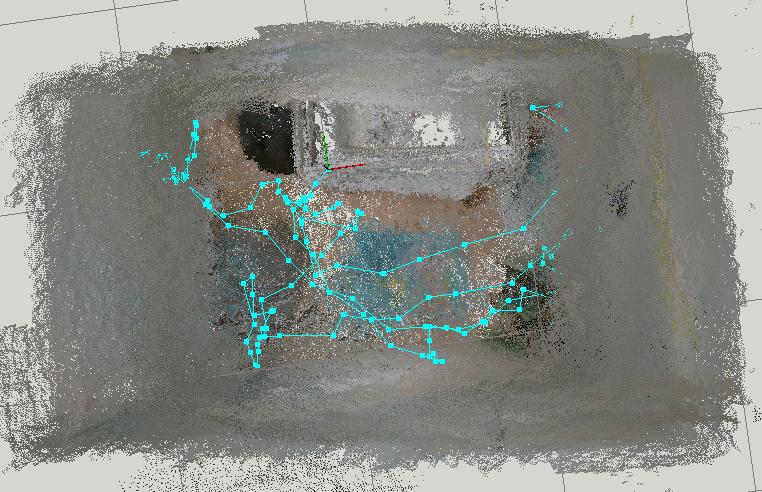
Are you using T265 pose estimation? It seems to drift a lot in that room. The textureless walls could explain that drift. Here is an example comparing the D435 point clouds on right between two poses separated by only 5 seconds:
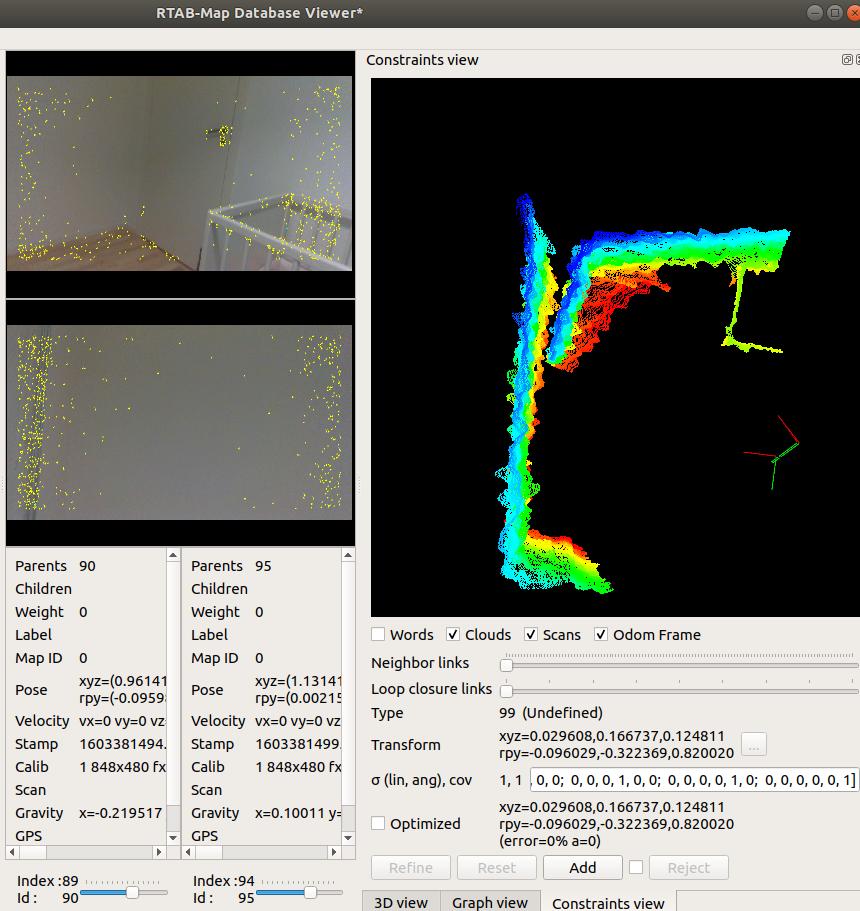
We can already see a large drift. This explains why the walls are so thick. As the point cloud is not created from a TOF/LiDAR camera, we cannot really refine the T265 odometry with geometry. This is kind of the limit of that hardware. Try in a room with more visual textures, the T265 should work better, and the clouds may be less noisy too.