Hi Mathieu,
I am using a very cheap 2d lidar
YDlidar TX20
The problem we are having is that the lidar has low angular resolution and low scanning frequency; we are also navigating a complex environment. Sometimes the lidar does not catch some features in the environment (due to low angular resolution), and it seems like the icp would shift a bit. I will upload an image of this issue later.
My attempted solution of this problem is use libpointmatcher to filter outliers; I have only applied an outlier filter, haven't touched too much of the parameter.
Before I read more into libpointmatcher and optimizes the outlier filter, my question is
1. Is there any libpointmatcher setting you would recommend in this case?
2. How fast is rtabmap running icp? Is this based on the detection rate, or is it based on the frequency of the lidar scan topic frequency. I can see if it is based on the detection rate, by increase the icp frequency (icp iteration based on how fast the scan is coming in), the localization would be better.
Sincerely,
Sean Xu
Edit: This is a snapshot of the map and the scan, a lot of the areas are just chairs and poles; the grid map cleared it as some ray tracing decreased the probability of occupancy. Would the icp problem actually be solved by changing the grid probability during mapping?
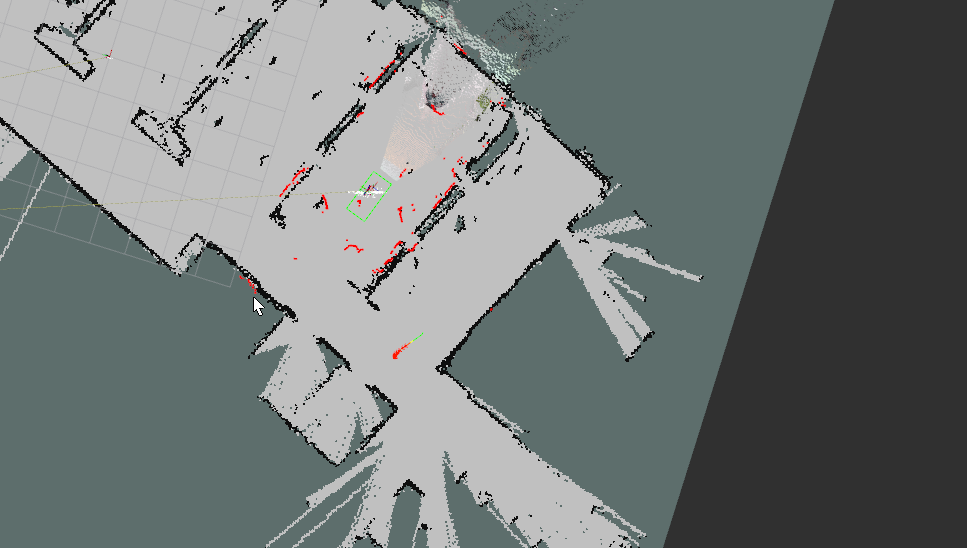
I guess one of the problem I always had is that, is the icp done on the gridmap, or the scans from previous nodes?