Question regarding path planning


|
Hello, everyone,
I am currently working on navigation by using the grid map and the localisation of RTABMAP.
So far everything works, I get the costmaps with the corresponding data when I drive around outside. I use a 24-layer lidar and an RGBD camera . My question refers to the planning of the route. When I publish a 2D NavGoal via RViz to /rtabmap/goal , the route planning is topological planned over the previously driven route and then bends at the end. (see picture) 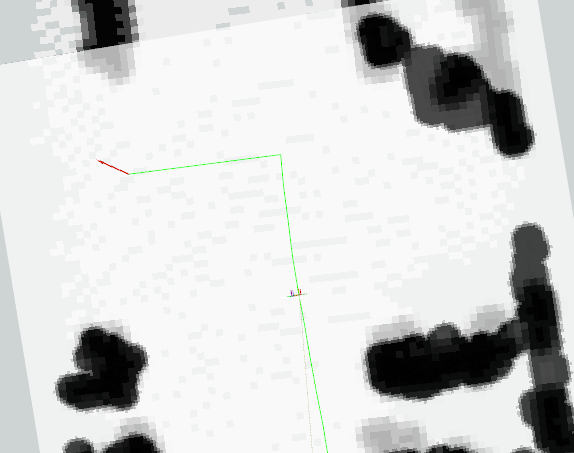 How do I make it possible to plan a route using the local and global cost map instead of topological planning? In order to get a smoother route. Do you have any suggestions or ideas? My launch file: <launch> <!-- <node pkg="tf" type="static_transform_publisher" name="odom_to_base" args="0 0 0 0 0 0 odom base_link 0.1" /> --> <node pkg="tf" type="static_transform_publisher" name="odom_to_carrier" args="0 0 1 0 0.0 0 base_link carrier_link 0.1" /> <node pkg="tf" type="static_transform_publisher" name="carrier_to_camera" args="0 0.3 0 0 0.0 0 carrier_link camera_link 0.1" /> <node pkg="tf" type="static_transform_publisher" name="carrier_to_laser" args="0 0 0.3 0 0.0 3.14159265359 carrier_link laser 0.1" /> <!-- ############################################################################################################ --> <node name="pointcloud_to_depthimage" pkg="rtabmap_ros" type="pointcloud_to_depthimage"> <remap from="cloud" to="scan_cloud"/> <!--<remap from="image" to="/camera/color/image_raw"> --> <remap from="camera_info" to="/camera/color/camera_info"/> <!-- <param name="wait_for_transform" value="0.2"/> <param name="fixed_frame_id" type="string" value="odom"/> --> <param name="decimation" type="int" value="1"/> <param name="fill_holes_size" type="int" value="20"/> </node> <!-- ############################################################################################################ --> <!--RTABMAP Launch --> <!-- ############################################################################################################ --> <!-- Choose between RGB-D and stereo --> <arg name="stereo" value="false"/> <!-- Choose visualization --> <arg name="rtabmapviz" value="false" /> <arg name="rviz" value="true" /> <!-- Localization-only mode --> <arg name="localization" value="true"/> <!-- sim time for convenience, if playing a rosbag --> <arg name="use_sim_time" value="true"/> <param if="$(arg use_sim_time)" name="use_sim_time" value="true"/> <!-- Corresponding config files --> <arg name="cfg" value="" /> <!-- To change RTAB-Map's parameters, set the path of config file (*.ini) generated by the standalone app --> <arg name="gui_cfg" value="~/.ros/2020-07-07-Schmal/mrs6_realsense/rtabmap_gui.ini"/> <arg name="rviz_cfg" value="$(find rtabmap_ros)/launch/config/rgbd.rviz" /> <arg name="frame_id" value="base_link"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published --> <arg name="odom_frame_id" value="odom"/> <!-- If set, TF is used to get odometry instead of the topic --> <arg name="map_frame_id" value="map"/> <arg name="ground_truth_frame_id" value=""/> <!-- e.g., "world" --> <arg name="ground_truth_base_frame_id" value=""/> <!-- e.g., "tracker", a fake frame matching the frame "frame_id" (but on different TF tree) --> <arg name="namespace" value="rtabmap"/> <arg name="database_path" value="~/.ros/2020-07-21-14-54-06.db"/> <arg name="queue_size" value="10"/> <arg name="wait_for_transform" value="0.3"/> <arg name="args" value=""/> <!-- delete_db_on_start, udebug - -delete_db_on_start--> <arg name="rtabmap_args" value="$(arg args)"/> <!-- deprecated, use "args" argument --> <arg name="launch_prefix" value=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes --> <arg name="output" value="screen"/> <!-- Control node output (screen or log) --> <arg name="publish_tf_map" value="true"/> <!-- if timestamps of the input topics are synchronized using approximate or exact time policy--> <arg if="$(arg stereo)" name="approx_sync" value="false"/> <arg unless="$(arg stereo)" name="approx_sync" value="true"/> <!-- RGB-D related topics --> <arg name="rgb_topic" value="/camera/color/image_raw"/> <arg name="depth_topic" value="/image_raw"/> <arg name="camera_info_topic" value="/camera/color/camera_info"/> <arg name="depth_camera_info_topic" value="/camera/color/camera_info"/> <!-- stereo related topics --> <arg name="stereo_namespace" default="/stereo_camera"/> <arg name="left_image_topic" default="$(arg stereo_namespace)/left/image_rect_color" /> <arg name="right_image_topic" default="$(arg stereo_namespace)/right/image_rect" /> <arg name="left_camera_info_topic" default="$(arg stereo_namespace)/left/camera_info" /> <arg name="right_camera_info_topic" default="$(arg stereo_namespace)/right/camera_info" /> <param name="use_action_for_goal" type="bool" value="true"/> <remap from="move_base" to="/move_base"/> <!-- Already synchronized RGB-D related topic, with rtabmap_ros/rgbd_sync nodelet --> <arg name="rgbd_sync" value="true"/> <!-- pre-sync rgb_topic, depth_topic, camera_info_topic --> <arg name="approx_rgbd_sync" value="true"/> <!-- false=exact synchronization --> <arg name="subscribe_rgbd" value="$(arg rgbd_sync)"/> <arg name="rgbd_topic" value="rgbd_image" /> <arg name="depth_scale" value="1" /> <arg name="compressed" value="false"/> <!-- If you want to subscribe to compressed image topics --> <arg name="rgb_image_transport" value="compressed"/> <!-- Common types: compressed, theora (see "rosrun image_transport list_transports") --> <arg name="depth_image_transport" value="compressedDepth"/> <!-- Depth compatible types: compressedDepth (see "rosrun image_transport list_transports") --> <arg name="subscribe_scan" value="false"/> <arg name="scan_topic" value="/scan"/> <arg name="subscribe_scan_cloud" value="true"/> <arg name="scan_cloud_topic" value="/scan_cloud"/> <arg name="scan_normal_k" value="10"/> <arg name="visual_odometry" value="false"/> <!-- Launch rtabmap visual odometry node --> <arg name="icp_odometry" value="true"/> <!-- Launch rtabmap icp odometry node --> <arg name="odom_topic" value="odom"/> <!-- Odometry topic name --> <arg name="vo_frame_id" value="$(arg odom_topic)"/> <!-- Visual/Icp odometry frame ID for TF --> <arg name="publish_tf_odom" value="true"/> <arg name="odom_tf_angular_variance" value="0.0001"/> <!-- If TF is used to get odometry, this is the default angular variance --> <arg name="odom_tf_linear_variance" value="0.0001"/> <!-- If TF is used to get odometry, this is the default linear variance --> <arg name="odom_args" value=""/> <!-- More arguments for odometry (overwrite same parameters in rtabmap_args) --> <arg name="odom_sensor_sync" value="false"/> <arg name="odom_guess_frame_id" value=""/> <arg name="odom_guess_min_translation" value="0"/> <arg name="odom_guess_min_rotation" value="0"/> <arg name="imu_topic" value="/imu/data"/> <!-- only used with VIO approaches --> <arg name="wait_imu_to_init" value="false"/> <arg name="subscribe_user_data" value="false"/> <!-- user data synchronized subscription --> <arg name="user_data_topic" value="/user_data"/> <arg name="user_data_async_topic" value="/user_data_async" /> <!-- user data async subscription (rate should be lower than map update rate) --> <arg name="gps_topic" value="/gps/fix" /> <!-- gps async subscription --> <arg name="tag_topic" value="/tag_detections" /> <!-- apriltags async subscription --> <arg name="tag_linear_variance" value="0.0001" /> <arg name="tag_angular_variance" value="9999" /> <!-- >=9999 means ignore rotation in optimization, when rotation estimation of the tag is not reliable --> <!-- These arguments should not be modified directly, see referred topics without "_relay" suffix above --> <arg if="$(arg compressed)" name="rgb_topic_relay" value="$(arg rgb_topic)_relay"/> <arg unless="$(arg compressed)" name="rgb_topic_relay" value="$(arg rgb_topic)"/> <arg if="$(arg compressed)" name="depth_topic_relay" value="$(arg depth_topic)_relay"/> <arg unless="$(arg compressed)" name="depth_topic_relay" value="$(arg depth_topic)"/> <arg if="$(arg compressed)" name="left_image_topic_relay" value="$(arg left_image_topic)_relay"/> <arg unless="$(arg compressed)" name="left_image_topic_relay" value="$(arg left_image_topic)"/> <arg if="$(arg compressed)" name="right_image_topic_relay" value="$(arg right_image_topic)_relay"/> <arg unless="$(arg compressed)" name="right_image_topic_relay" value="$(arg right_image_topic)"/> <arg if="$(arg rgbd_sync)" name="rgbd_topic_relay" value="$(arg rgbd_topic)"/> <arg unless="$(arg rgbd_sync)" name="rgbd_topic_relay" value="$(arg rgbd_topic)_relay"/> <!-- Nodes --> <group ns="$(arg namespace)"> <!-- relays --> <group unless="$(arg stereo)"> <group unless="$(arg subscribe_rgbd)"> <node if="$(arg compressed)" name="republish_rgb" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg rgb_topic) raw out:=$(arg rgb_topic_relay)" /> <node if="$(arg compressed)" name="republish_depth" type="republish" pkg="image_transport" args="$(arg depth_image_transport) in:=$(arg depth_topic) raw out:=$(arg depth_topic_relay)" /> </group> <group if="$(arg rgbd_sync)"> <node if="$(arg compressed)" name="republish_rgb" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg rgb_topic) raw out:=$(arg rgb_topic_relay)" /> <node if="$(arg compressed)" name="republish_depth" type="republish" pkg="image_transport" args="$(arg depth_image_transport) in:=$(arg depth_topic) raw out:=$(arg depth_topic_relay)" /> <node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/rgbd_sync" output="$(arg output)"> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <param name="approx_sync" type="bool" value="$(arg approx_rgbd_sync)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="depth_scale" type="double" value="$(arg depth_scale)"/> </node> </group> </group> <group if="$(arg stereo)"> <group unless="$(arg subscribe_rgbd)"> <node if="$(arg compressed)" name="republish_left" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg left_image_topic) raw out:=$(arg left_image_topic_relay)" /> <node if="$(arg compressed)" name="republish_right" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg right_image_topic) raw out:=$(arg right_image_topic_relay)" /> </group> <group if="$(arg rgbd_sync)"> <node if="$(arg compressed)" name="republish_left" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg left_image_topic) raw out:=$(arg left_image_topic_relay)" /> <node if="$(arg compressed)" name="republish_right" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg right_image_topic) raw out:=$(arg right_image_topic_relay)" /> <node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/stereo_sync" output="$(arg output)"> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <param name="approx_sync" type="bool" value="$(arg approx_rgbd_sync)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> </node> </group> </group> <group unless="$(arg rgbd_sync)"> <group if="$(arg subscribe_rgbd)"> <node name="republish_rgbd_image" type="rgbd_relay" pkg="rtabmap_ros"> <remap if="$(arg compressed)" from="rgbd_image" to="$(arg rgbd_topic)/compressed"/> <remap if="$(arg compressed)" from="$(arg rgbd_topic)/compressed_relay" to="$(arg rgbd_topic_relay)"/> <remap unless="$(arg compressed)" from="rgbd_image" to="$(arg rgbd_topic)"/> <param if="$(arg compressed)" name="uncompress" value="true"/> </node> </group> </group> <!-- Visual odometry --> <group unless="$(arg icp_odometry)"> <group if="$(arg visual_odometry)"> <!-- RGB-D Odometry --> <node unless="$(arg stereo)" pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="$(arg output)" args="$(arg rtabmap_args) $(arg odom_args)" launch-prefix="$(arg launch_prefix)"> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <remap from="odom" to="$(arg odom_topic)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg vo_frame_id)"/> <param name="publish_tf" type="bool" value="$(arg publish_tf_odom)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="wait_imu_to_init" type="bool" value="$(arg wait_imu_to_init)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="guess_frame_id" type="string" value="$(arg odom_guess_frame_id)"/> <param name="guess_min_translation" type="double" value="$(arg odom_guess_min_translation)"/> <param name="guess_min_rotation" type="double" value="$(arg odom_guess_min_rotation)"/> </node> <!-- Stereo Odometry --> <node if="$(arg stereo)" pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="$(arg output)" args="$(arg rtabmap_args) $(arg odom_args)" launch-prefix="$(arg launch_prefix)"> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <remap from="odom" to="$(arg odom_topic)"/> <remap from="imu" to="$(arg imu_topic)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg vo_frame_id)"/> <param name="publish_tf" type="bool" value="$(arg publish_tf_odom)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="wait_imu_to_init" type="bool" value="$(arg wait_imu_to_init)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="guess_frame_id" type="string" value="$(arg odom_guess_frame_id)"/> <param name="guess_min_translation" type="double" value="$(arg odom_guess_min_translation)"/> <param name="guess_min_rotation" type="double" value="$(arg odom_guess_min_rotation)"/> </node> </group> </group> <!-- ICP Odometry --> <node if="$(arg icp_odometry)" pkg="rtabmap_ros" type="icp_odometry" name="icp_odometry" output="$(arg output)" args="$(arg rtabmap_args) $(arg odom_args)" launch-prefix="$(arg launch_prefix)"> <remap from="scan" to="$(arg scan_topic)"/> <remap from="scan_cloud" to="$(arg scan_cloud_topic)"/> <remap from="odom" to="$(arg odom_topic)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg vo_frame_id)"/> <param name="publish_tf" type="bool" value="$(arg publish_tf_odom)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="wait_imu_to_init" type="bool" value="$(arg wait_imu_to_init)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="guess_frame_id" type="string" value="$(arg odom_guess_frame_id)"/> <param name="guess_min_translation" type="double" value="$(arg odom_guess_min_translation)"/> <param name="guess_min_rotation" type="double" value="$(arg odom_guess_min_rotation)"/> <!-- ICP parameters --> <param name="Icp/PointToPlane" type="string" value="true"/> <param name="Icp/Iterations" type="string" value="10"/> <param name="Icp/VoxelSize" type="string" value="0.3"/> <!-- 0.2--> <param name="Icp/DownsamplingStep" type="string" value="1"/> <!-- cannot be increased with ring-like lidar --> <param name="Icp/Epsilon" type="string" value="0.001"/> <param name="Icp/PointToPlaneK" type="string" value="20"/> <param name="Icp/PointToPlaneRadius" type="string" value="0"/> <param name="Icp/MaxTranslation" type="string" value="2"/> <param name="Icp/MaxCorrespondenceDistance" type="string" value="1"/> <param name="Icp/PM" type="string" value="true"/> <param name="Icp/PMOutlierRatio" type="string" value="0.1"/> <param name="Icp/CorrespondenceRatio" type="string" value="0.01"/> <!-- <param name="Icp/RangeMax" type="string" value="20.0"/> --> <!-- Odom parameters --> <param name="Odom/ScanKeyFrameThr" type="string" value="0.95"/> <param name="Odom/Strategy" type="string" value="0"/> <param name="Reg/Force3DoF" type="bool" value="true"/> <!-- <param name="OdomF2M/ScanSubtractRadius" type="string" value="0.2"/> --> <!-- <param name="OdomF2M/ScanMaxSize" type="string" value="15000"/> --> </node> <!-- Visual SLAM (robot side) --> <!-- args: "delete_db_on_start" and "udebug" --> <node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="$(arg output)" args="$(arg rtabmap_args)" launch-prefix="$(arg launch_prefix)"> <param if="$(arg stereo)" name="subscribe_depth" type="bool" value="false"/> <param unless="$(arg stereo)" name="subscribe_depth" type="bool" value="true"/> <param name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="subscribe_stereo" type="bool" value="$(arg stereo)"/> <param name="subscribe_scan" type="bool" value="$(arg subscribe_scan)"/> <param name="subscribe_scan_cloud" type="bool" value="$(arg subscribe_scan_cloud)"/> <param name="subscribe_user_data" type="bool" value="$(arg subscribe_user_data)"/> <param if="$(arg visual_odometry)" name="subscribe_odom_info" type="bool" value="true"/> <param if="$(arg icp_odometry)" name="subscribe_odom_info" type="bool" value="true"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="map_frame_id" type="string" value="$(arg map_frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg odom_frame_id)"/> <param name="publish_tf" type="bool" value="$(arg publish_tf_map)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="odom_tf_angular_variance" type="double" value="$(arg odom_tf_angular_variance)"/> <param name="odom_tf_linear_variance" type="double" value="$(arg odom_tf_linear_variance)"/> <param name="odom_sensor_sync" type="bool" value="$(arg odom_sensor_sync)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="database_path" type="string" value="$(arg database_path)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="scan_normal_k" type="int" value="$(arg scan_normal_k)"/> <param name="landmark_linear_variance" type="double" value="$(arg tag_linear_variance)"/> <param name="landmark_angular_variance" type="double" value="$(arg tag_angular_variance)"/> <param name="Reg/Strategy" type="string" value="1"/> <!--1 ICP registration (vorher) / 2 ICP + Visual--> <param name="RGBD/OptimizeMaxError" type="double" value="100.0" /> <param name="RGBD/ProximityPathMaxNeighbors" type="string" value="10"/> <param name="RGBD/ProximityBySpace" type="bool" value="true"/> <param name="RGBD/GoalReachedRadius" type="double" value="2.0"/> <param name="Optimizer/GravitySigma" type="double" value="0.3" /> <param name="use_action_for_goal" type="bool" value="true"/> <remap from="move_base" to="/planner/move_base"/> <param name="Reg/Force3DoF" type="bool" value="true"/> <param name="Optimizer/Slam2D" type="bool" value="true" /> <param name="Grid/CellSize" type="double" value="0.25"/> <param name="Grid/ClusterRadius" type="double" value="1.0"/> <param name="Grid/FromDepth" type="bool" value="false"/> <param name="Grid/MaxGroundAngle" type="int" value="50"/> <param name="Grid/NoiseFilteringRadius" type="double" value="0.5"/> <param name="Grid/RangeMax" type="double" value="10.0"/> <!-- RTAB-Map's parameters --> <!--<param name="RGBD/NeighborLinkRefining" type="string" value="true"/> --> <!-- set true to refine odometry with lidar --> <!-- <param name="RGBD/ProximityPathMaxNeighbors" type="string" value="20"/> --> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="scan" to="$(arg scan_topic)"/> <remap from="scan_cloud" to="$(arg scan_cloud_topic)"/> <remap from="user_data" to="$(arg user_data_topic)"/> <remap from="user_data_async" to="$(arg user_data_async_topic)"/> <remap from="gps/fix" to="$(arg gps_topic)"/> <remap from="tag_detections" to="$(arg tag_topic)"/> <remap from="odom" to="$(arg odom_topic)"/> <remap from="imu" to="$(arg imu_topic)"/> <!-- localization mode --> <param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/> <param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/> <param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/> </node> <!-- Visualisation RTAB-Map --> <node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(arg gui_cfg)" output="$(arg output)" launch-prefix="$(arg launch_prefix)"> <param if="$(arg stereo)" name="subscribe_depth" type="bool" value="false"/> <param unless="$(arg stereo)" name="subscribe_depth" type="bool" value="true"/> <param name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="subscribe_stereo" type="bool" value="$(arg stereo)"/> <param name="subscribe_scan" type="bool" value="$(arg subscribe_scan)"/> <param name="subscribe_scan_cloud" type="bool" value="$(arg subscribe_scan_cloud)"/> <param if="$(arg visual_odometry)" name="subscribe_odom_info" type="bool" value="true"/> <param if="$(arg icp_odometry)" name="subscribe_odom_info" type="bool" value="true"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg odom_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="scan" to="$(arg scan_topic)"/> <remap from="scan_cloud" to="$(arg scan_cloud_topic)"/> <remap from="odom" to="$(arg odom_topic)"/> </node> </group> <!-- Visualization RVIZ --> <node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(arg rviz_cfg)"/> <node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb" output="$(arg output)"> <remap if="$(arg stereo)" from="left/image" to="$(arg left_image_topic_relay)"/> <remap if="$(arg stereo)" from="right/image" to="$(arg right_image_topic_relay)"/> <remap if="$(arg stereo)" from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap if="$(arg stereo)" from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap unless="$(arg subscribe_rgbd)" from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap unless="$(arg subscribe_rgbd)" from="depth/image" to="$(arg depth_topic_relay)"/> <remap unless="$(arg subscribe_rgbd)" from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/> <remap from="cloud" to="voxel_cloud" /> <param name="decimation" type="double" value="4"/> <param name="voxel_size" type="double" value="0.0"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> </node> </launch> <launch> <arg name="use_sim_time" value="true"/> <param if="$(arg use_sim_time)" name="use_sim_time" value="true"/> <group ns="planner"> <remap from="scan_cloud" to="/planner_cloud"/> <remap from="map" to="/rtabmap/grid_map"/> <!-- <remap from="move_base_simple/goal" to="/planner_goal"/> --> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> <rosparam file="/home/launch/navigation/costmap_common_params.yaml" command="load" ns="global_costmap" /> <rosparam file="/home/launch/navigation/costmap_common_params.yaml" command="load" ns="local_costmap" /> <rosparam file="/home/launch/navigation/local_costmap_params.yaml" command="load" /> <rosparam file="/home/launch/navigation/global_costmap_params.yaml" command="load" /> <rosparam file="/home/launch/navigation/base_local_planner_params.yaml" command="load" /> </node> </group> </launch> obstacle_range: 10.0
raytrace_range: 15.0
max_obstacle_height: 999.0
min_obstacle_height: -999.9
#footprint: [[x0, y0], [x1, y1], ... [xn, yn]]
#robot_radius: ir_of_robot
inflation_radius: 0.55
observation_sources: point_cloud_sensor # list of sensors
point_cloud_sensor: {sensor_frame: laser, data_type: PointCloud2, topic: /scan_cloud, marking: true, clearing: true}
#laser_scan_sensor: {sensor_frame: frame_name, data_type: LaserScan, topic: topic_name, marking: true, clearing: true}
local_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true #local_costmap stays centered during navigation
width: 20
height: 20
resolution: 0.1
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 5.0
static_map: true
TrajectoryPlannerROS:
max_vel_x: 0.45
min_vel_x: 0.1
max_vel_theta: 1.0
min_in_place_vel_theta: 0.4
acc_lim_theta: 3.2
acc_lim_x: 2.5
acc_lim_y: 2.5
xy_goal_tolerance: 4.0
pdist_scale: 1.8
holonomic_robot: true
|
|
Administrator
|
You should look at the global path computed by move_base. The one from rtabmap is taking only the nodes in the graph as waypoints, but rtabmap should send those waypoints to move_base, which will compute a smooth path based on the global costmap.
cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |