Hi Mathieu,
I am trying to understand how icp_odometry node works and I have a question regarding the relationship of the key frame and the pointcloud map, more specifically about the subtract filtering. In the paper with the title RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation it is written that the map is subtracted from the new point cloud using a maximum radius of OdomF2M/ScanSubtractRadius then the remaining points are added to the point cloud map.
[0] I do not quite understand why is this happening. Also where does this radius is referring to ? The center of the scan ? And if yes then why it is suggested to match the voxel size, let's say that this radius is set to 0.5 then almost nothing would be subtracted, isn't this the case or am I missing something?
[1] Also, is this process repeated until the current scan becomes Key Frame
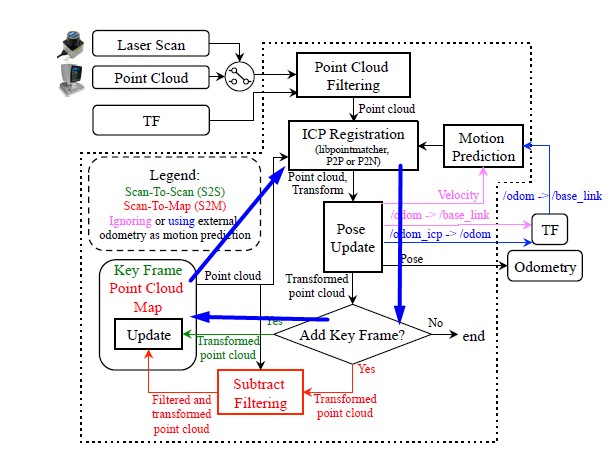
or the arrow from the Point Cloud Map update square that goes to the ICP registration refers to the fact that the Point Cloud Map will be the cloud to register the next cloud?
Regards,
Anthony.

