Hi Matthieu,
Apologies for the late reply. I’ve been preoccupied on some other projects. I’m still unfamiliar with some of the procedures.
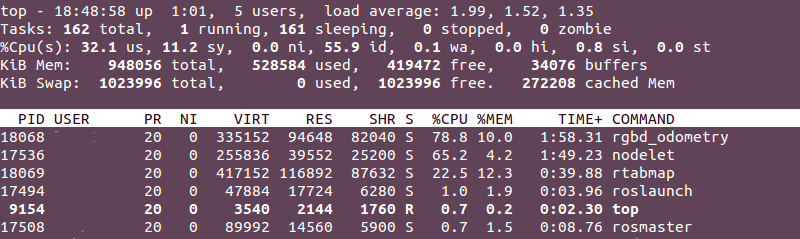
On the Raspberry Pi, I used launched openni2 and rtabmap_ros in two separate terminal windows. A warning regarding missing camera calibration file popped up on the openni2 terminal window and some errors regarding unrecognized argument –-Vis/MaxFeatures but otherwise everything is running just fine. I used the following commands:
$ roslaunch openni2_launch openni2.launch depth_registration:=true
$ roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start --Vis/MaxFeatures 500 --Mem/ImagePreDecimation 2 --Mem/ImagePostDecimation 2 --Kp/DetectorStrategy 6 --OdomF2M/MaxSize 1000 --Odom/ImageDecimation 2" rtabmapviz:=false
On my client computer I ran the following command:
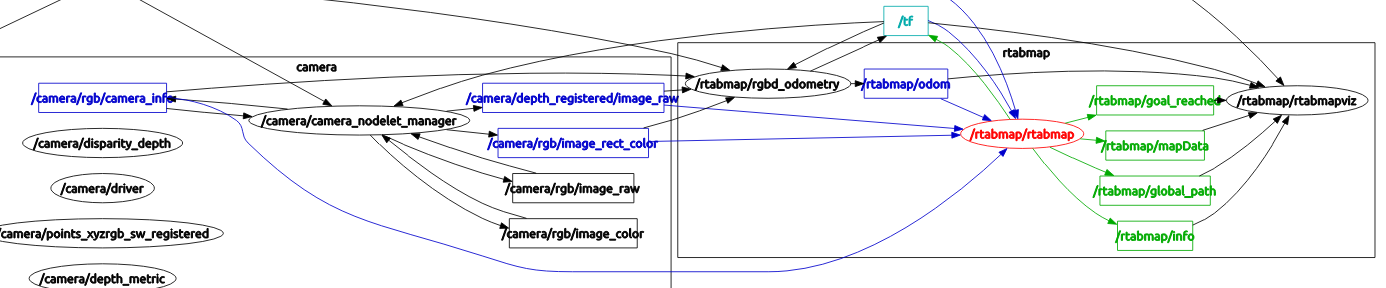
$ ROS_NAMESPACE=rtabmap rosrun rtabmap_ros rtabmapviz _subscribe_odom_info:=false _frame_id:=camera_link
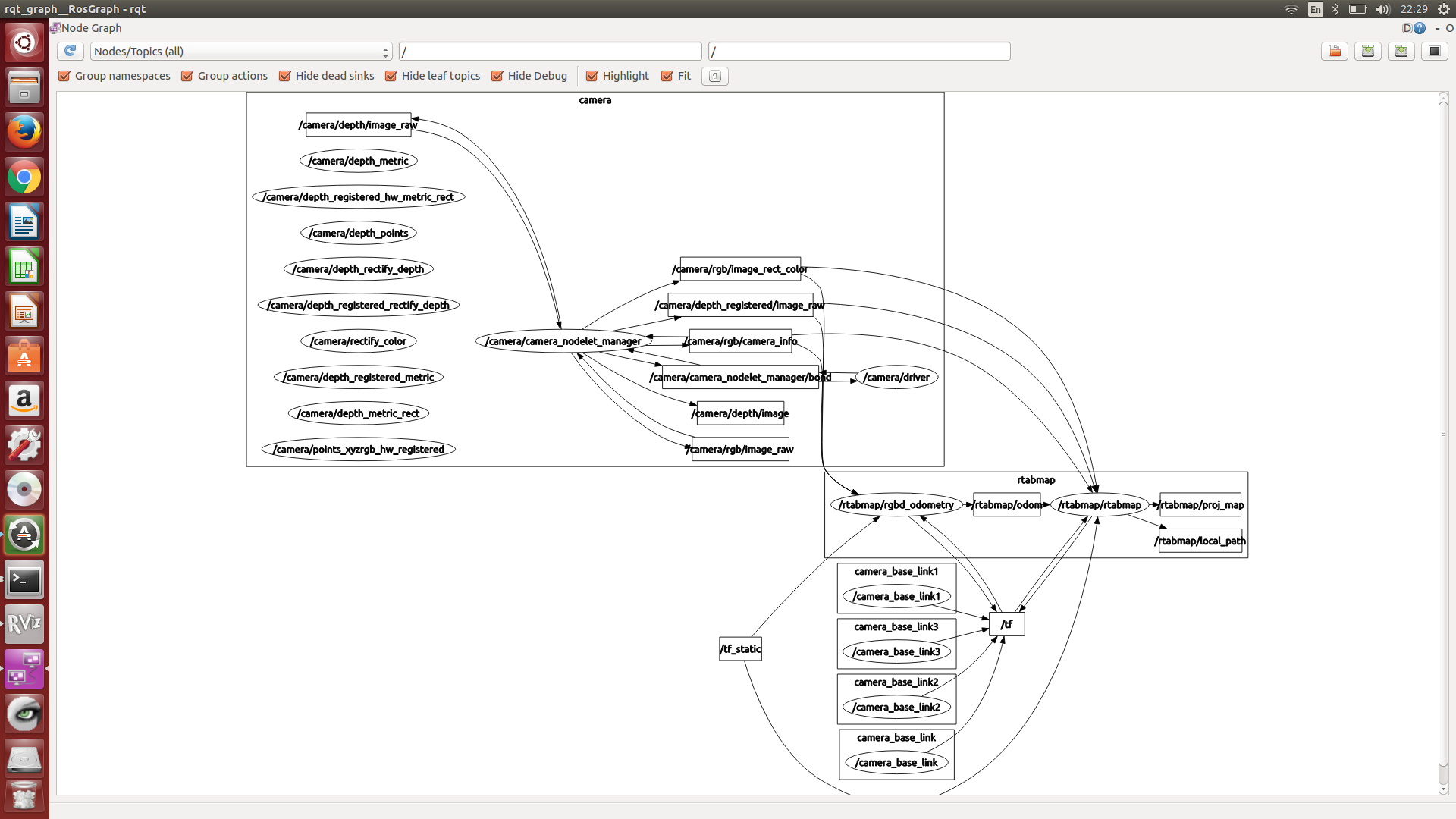
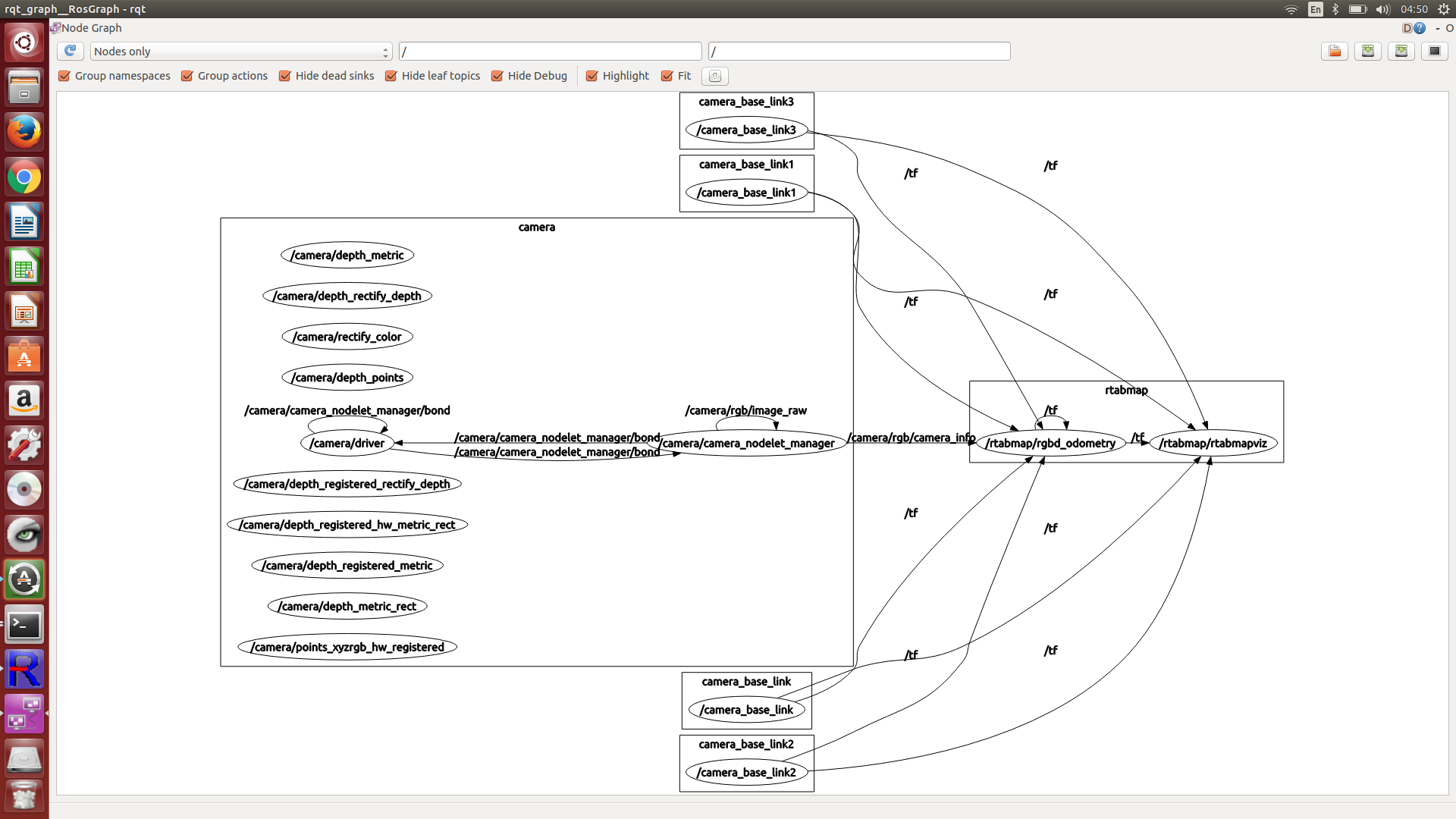
This results in a black screen. I also received warning saying rtabmapviz: could not get transform from odom to camera_link after 0.1 seconds. The following is the resulting image from rqt_graph.
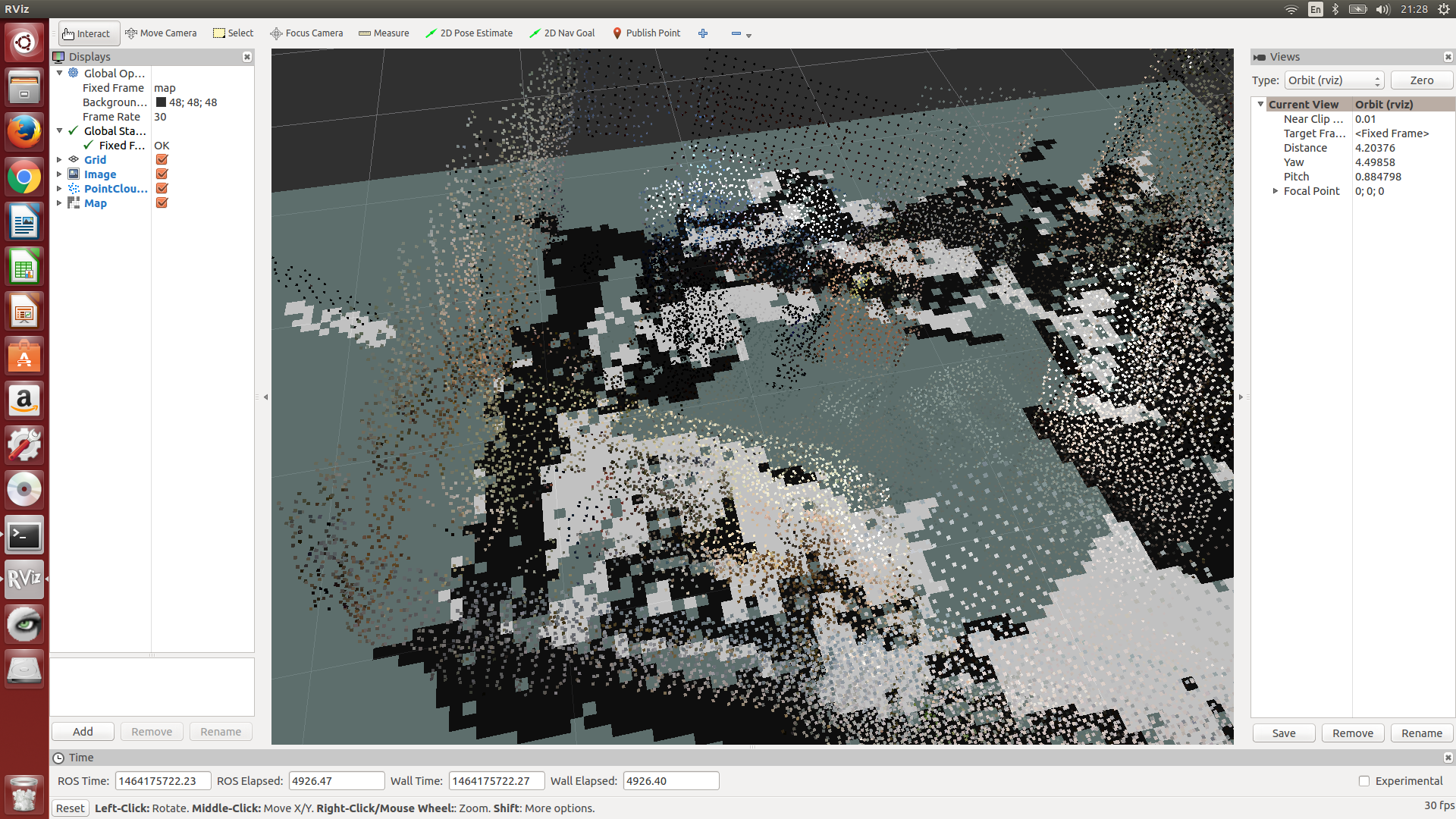
Ultimately what I’m trying to do is use the raspberry pi on a quadrotor, create an occupancy grid of an environment and navigate through it. For now, I’m trying to make it work as a handheld mapping system as proof of concept. Would rviz be better than rtabmapviz in this case? If so, is it possible to run it within the ROS_NAMESPACE?
You also mentioned
rostopic hz /rtabmap/mapData
which I tried to run on a separate terminal on the client computer but this didn't seem to change anything.
Apologies for the long-winded question. I'm still trying to learn my way around this framework and any help you can give will be much appreciated.