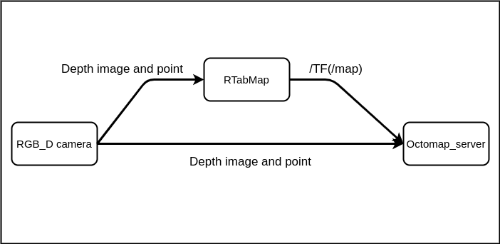
RGB_D camera + octomap_server + rtabmap

RGB_D camera + octomap_server + rtabmap

|
Re: RGB_D camera + octomap_server + rtabmap
|
Administrator
|
Re: RGB_D camera + octomap_server + rtabmap
|
|
Re: RGB_D camera + octomap_server + rtabmap
|
Administrator
|
Re: RGB_D camera + octomap_server + rtabmap
|
|
Re: RGB_D camera + octomap_server + rtabmap
|
Administrator
|
| Free forum by Nabble | Edit this page |