Hi Mathieu,
I see that in RTAB-Map preferences an RGB camera can be set for source. Can RTAB-Map be used with monocular vision only for odometry and loop-closures without map building? I calibrated my USB camera using the "Calibrate" procedure inside RTAB-Map, but when I start the acquisition in localization mode (no mapping) the odometry cannot be computed, all feature points are yellow and the camera pose is invalid.
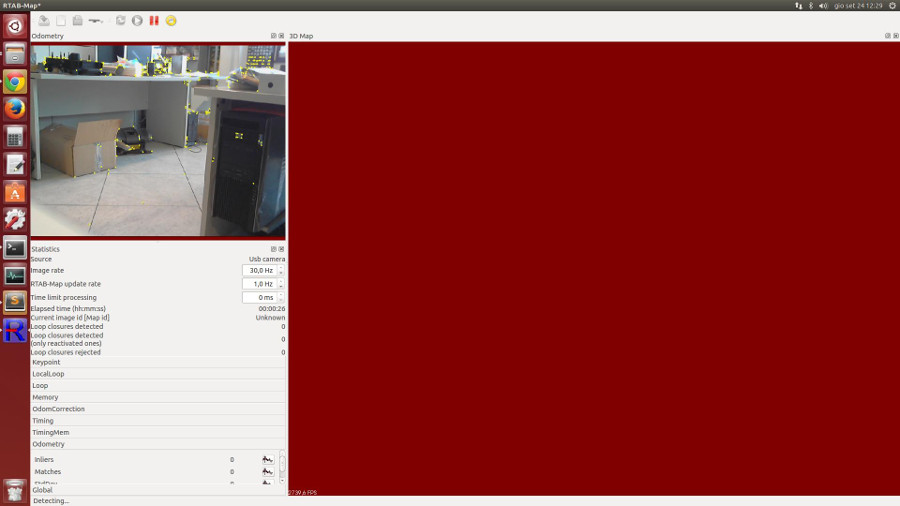
Can this be done, or the odometry is computed only from 3D points coming from RGBD point cloud?
Thanks
~Guido

