Hello,
I've integrated rtabmap inside my application using librtabmap_core.so.0.15.3 and librtabmap_utilite.so.0.15.3
I've developed a specific Camera driver to use with rtabmap (like realsense driver or rgbd driver). It is based on the RGBD driver but instead of finding its depth and color images from files inside folders, this images are sent by an external simulated camera (from a unity system with a 3d scene). The system works fine and can create a 3dmap of the scene shown in the unity system. But I've 2 problems :
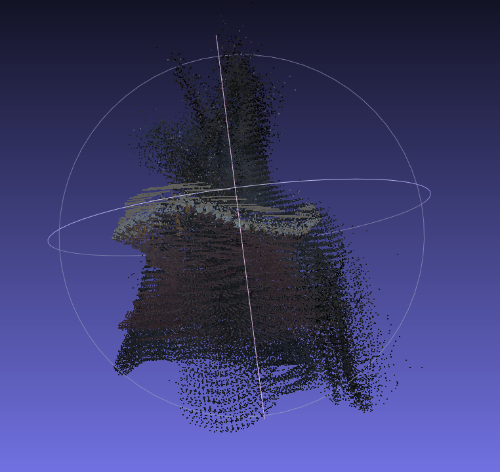
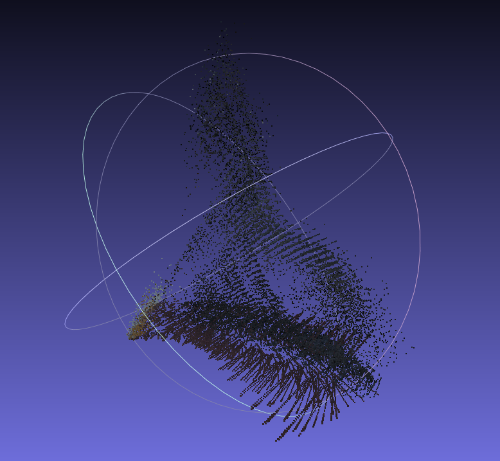
1. The 3dmap is not exactly the same as the unity scene. I can see that the 3dmap seems distorded (see pictures) against the unity scene (see one of the rgb and depth images sent). I have to provide a "calibration parameterset" to my driver : focal length (fx, fy) and optical center (cx, cy). I think the problem is here. I have no idea how I can obtain them because the camera is a unity camera and unity don't provide this kind of parameters. Rtabmap (standalone) offers a way to calibrate a camera using a chessboard but here the chessboard should be inside the unity scene. Not very easy to do. Is there a possibility to calibrate the camera without chessboard ?
2. The unity scene is located in X=-30 Y=-120 Z=-25 so I've set this coordinates to the localTransform of my Camera driver creation (same has your drivers) : Transform opticalRotation(x,y,z,roll,pitch,yaw); Using this parameters the scene is rendered in the good location (X,Y and Z are near my starting point (X=-30 Y=-120 Z=-25)) but the localization provided by the odometry is not correct. It starts from X=0, Y=0, Z=0 and derives fastly to incoherent values. I've hoped that the localization starts from my starting position and not from 0,0,0 ?
Thanks,
Christophe
Here is the 3dmap rendered by rtabmap.
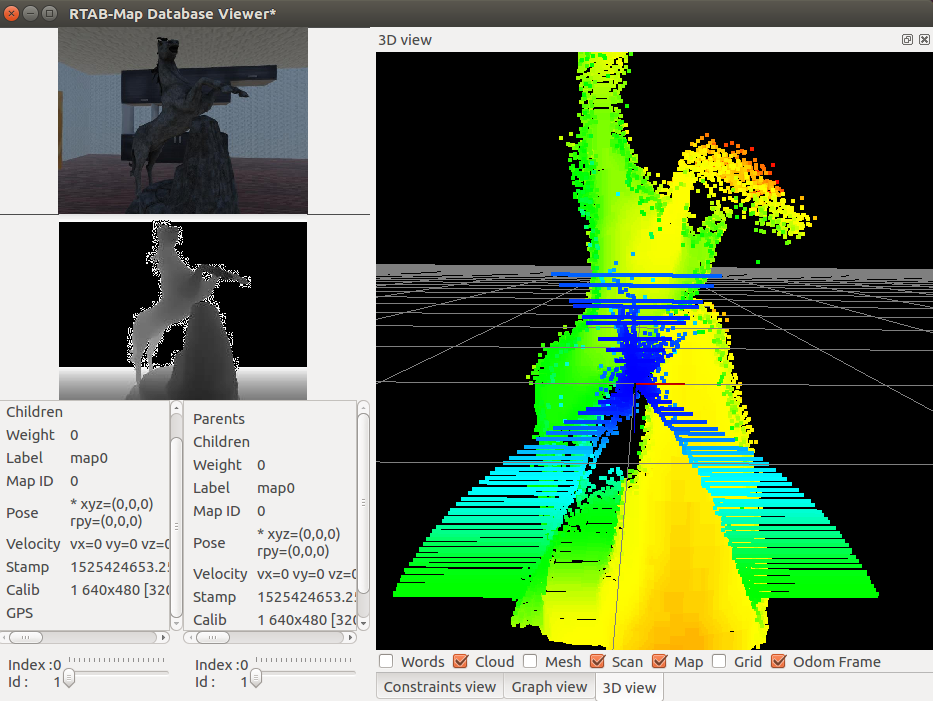
Here are one of the depth and color image used (from unity)