Hi, I am using the RGBD odometer provide by the rtabmap with my L515 sensor,
The following result is what I got.
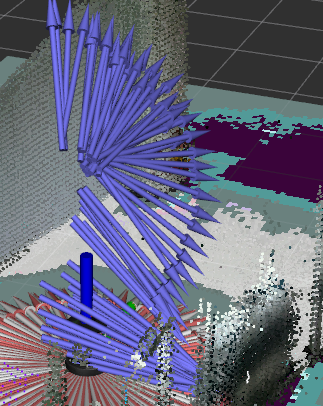
The blue arrow is the rgbd-odom.
The orange is the wheel-odom.
The white one is the ekf_localization final output.
I only perform simple rotation at the beginning of mapping. Yet the RGBD-odometer starts to drift. According to the ROS WIKI Rtabmap rgbd-odometry only provide image and imu input. As far as the tf tree I make it publish by ekf_localization node only so that the rgbd-odometry can reference to the correct one, which I specified with frame_id "odom."
Did I miss config something?
Thanks in advance.

