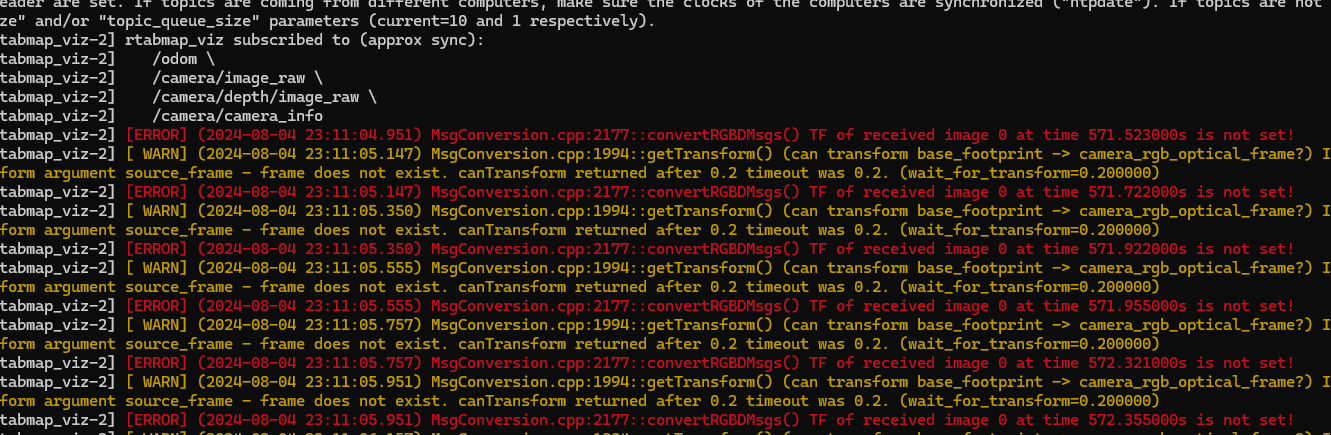
Got this error when I launched the file. this is my launch file
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, SetEnvironmentVariable
from launch.substitutions import LaunchConfiguration
from launch.conditions import IfCondition, UnlessCondition
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time')
qos = LaunchConfiguration('qos')
localization = LaunchConfiguration('localization')
parameters={
'frame_id':'base_footprint',
'use_sim_time':use_sim_time,
'subscribe_depth':True,
'use_action_for_goal':True,
'qos_image':qos,
'qos_imu':qos,
'Reg/Force3DoF':'true',
'Optimizer/GravitySigma':'0' # Disable imu constraints (we are already in 2D)
}
remappings=[
('rgb/image', '/camera/image_raw'),
('rgb/camera_info', '/camera/camera_info'),
('depth/image', '/camera/depth/image_raw')]
return LaunchDescription([
# Launch arguments
DeclareLaunchArgument(
'use_sim_time', default_value='true',
description='Use simulation (Gazebo) clock if true'),
DeclareLaunchArgument(
'qos', default_value='2',
description='QoS used for input sensor topics'),
DeclareLaunchArgument(
'localization', default_value='false',
description='Launch in localization mode.'),
# Nodes to launch
# SLAM mode:
Node(
condition=UnlessCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters],
remappings=remappings,
arguments=['-d']), # This will delete the previous database (~/.ros/rtabmap.db)
# Localization mode:
Node(
condition=IfCondition(localization),
package='rtabmap_slam', executable='rtabmap', output='screen',
parameters=[parameters,
{'Mem/IncrementalMemory':'False',
'Mem/InitWMWithAllNodes':'True'}],
remappings=remappings),
Node(
package='rtabmap_viz', executable='rtabmap_viz', output='screen',
parameters=[parameters],
remappings=remappings),
])

