Hi Sean,
To use GTSAM, rtabmap should be rebuilt (see cmake status). Latest GTSAM >=4 should be also used.
Yes, you can set the parameters in the launch file like shown in the
tutorial:
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap">
<param name="RGBD/OptimizeStrategy" type="string" value="1"/> <!-- g2o=1, GTSAM=2 -->
<param name="RGBD/OptimizeRobust" type="string" value="true"/>
<param name="RGBD/OptimizeMaxError" type="string" value="0"/> <!-- should be 0 if RGBD/OptimizeRobust is true -->
...
</node>
What kind of improvements do you want to do on the point cloud map after optimization?
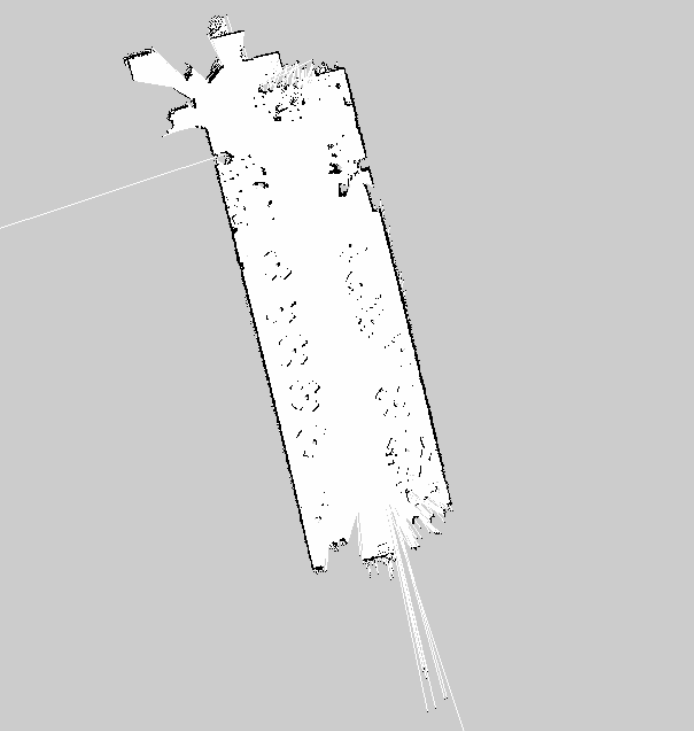
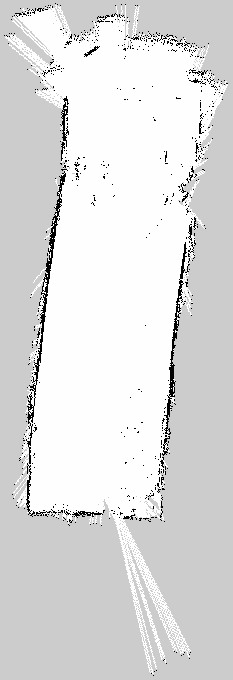
The occupancy grid should be similar between RTAB-Map and GMapping, can you show an example? If it is because of the range of the local occupancy grid, you can set Grid/RangeMax to 0 (default 5 meters).
cheers,
Mathieu