Good point, camera topics were correctly publishing at 25 Hz, but the odometry was stuck, because my driver node was publishing "/odom" and not "/base_controller/odom". I corrected the <remap> in launch file, thanks for pointing it out!
However, after restarting my launch file, the log now shows this and still nothing is displayed:
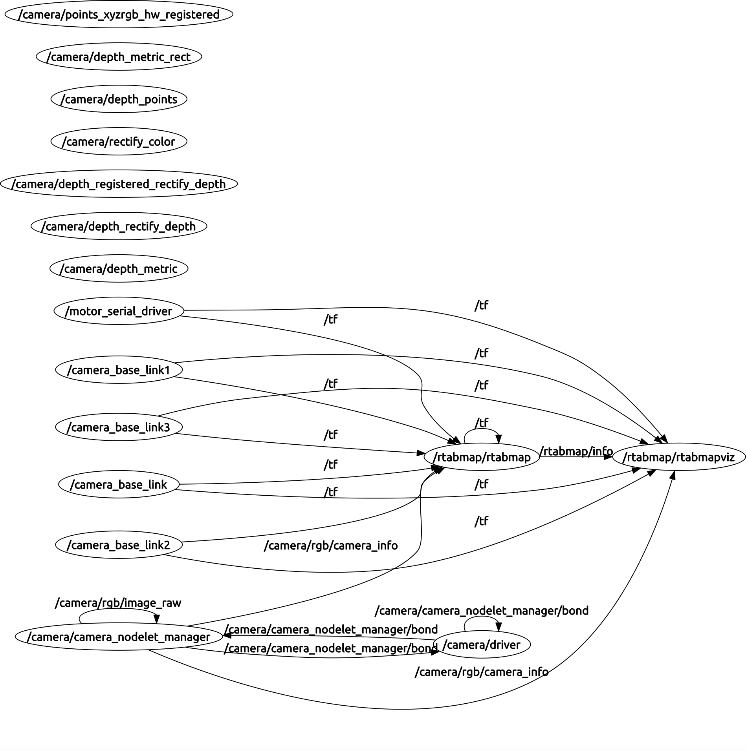
/rtabmap/rtabmap subscribed to:
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/rgb/camera_info,
/odom
[INFO] [1442573630.949665648]: rtabmap 0.10.4 started...
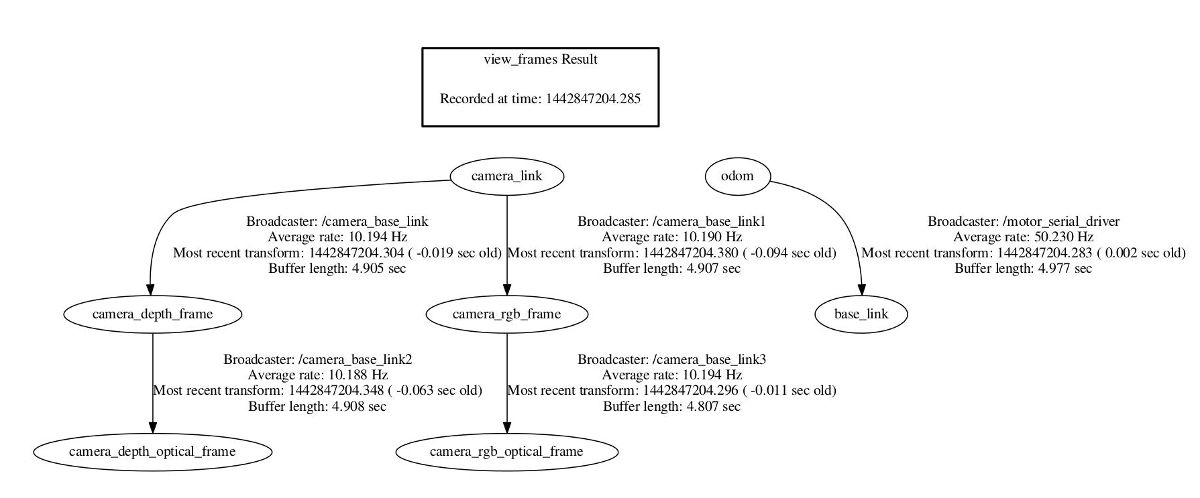
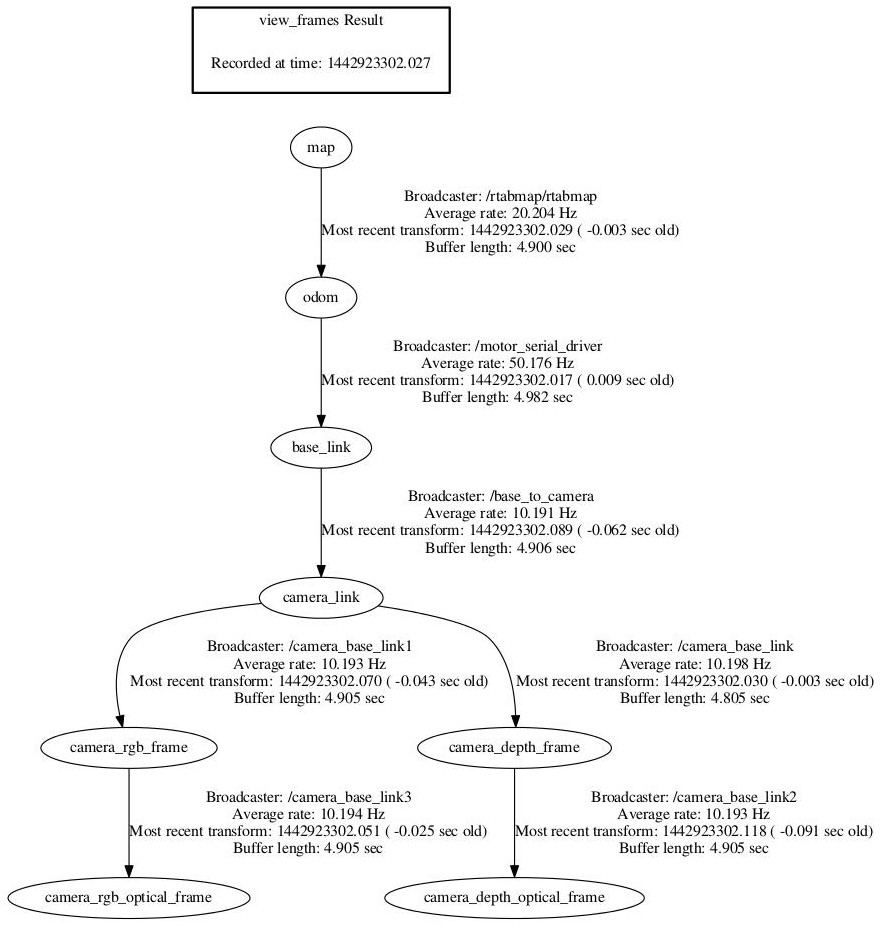
[WARN] [1442573632.285153021]: Could not get transform from base_link to camera_rgb_optical_frame after 1 second!
Do you have an idea also about this?
PS: sorry, I'm a beginner with ROS, I've learned the basics, but still miss some points about tf, frames and launch files, so I need some more advice than ROS experts, many thanks in advance! ;)
~Guido