Hi.
I am attempting to use ekf_localization in combination with RTAB-Map on my robot. However, when I do this, the rtabmap node does not publish any data.
The command line output after running rtabmap end with:
/rtabmap/rtabmap subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/rgb/camera_info,
/odometry/filtered
[ INFO] [1489070587.409150293]: rtabmap 0.11.8 started...
I have checked (using rostopic echo) that each of these topics are being published to, and they are. Here is the result of rqt_graph to show that they are being correctly subscribed to by rtabmap:
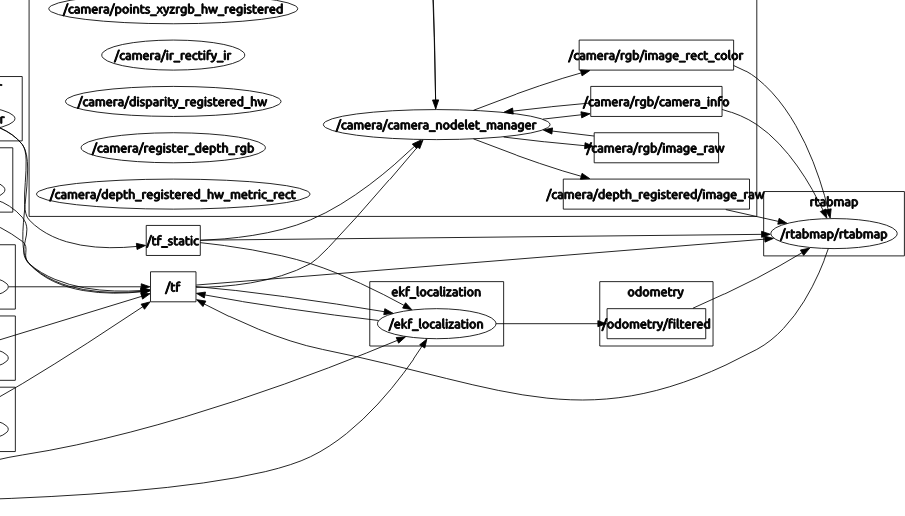
In addition, here is the TF free, confirming that ekf_localization is publishing the transform from odom to base_footprint:
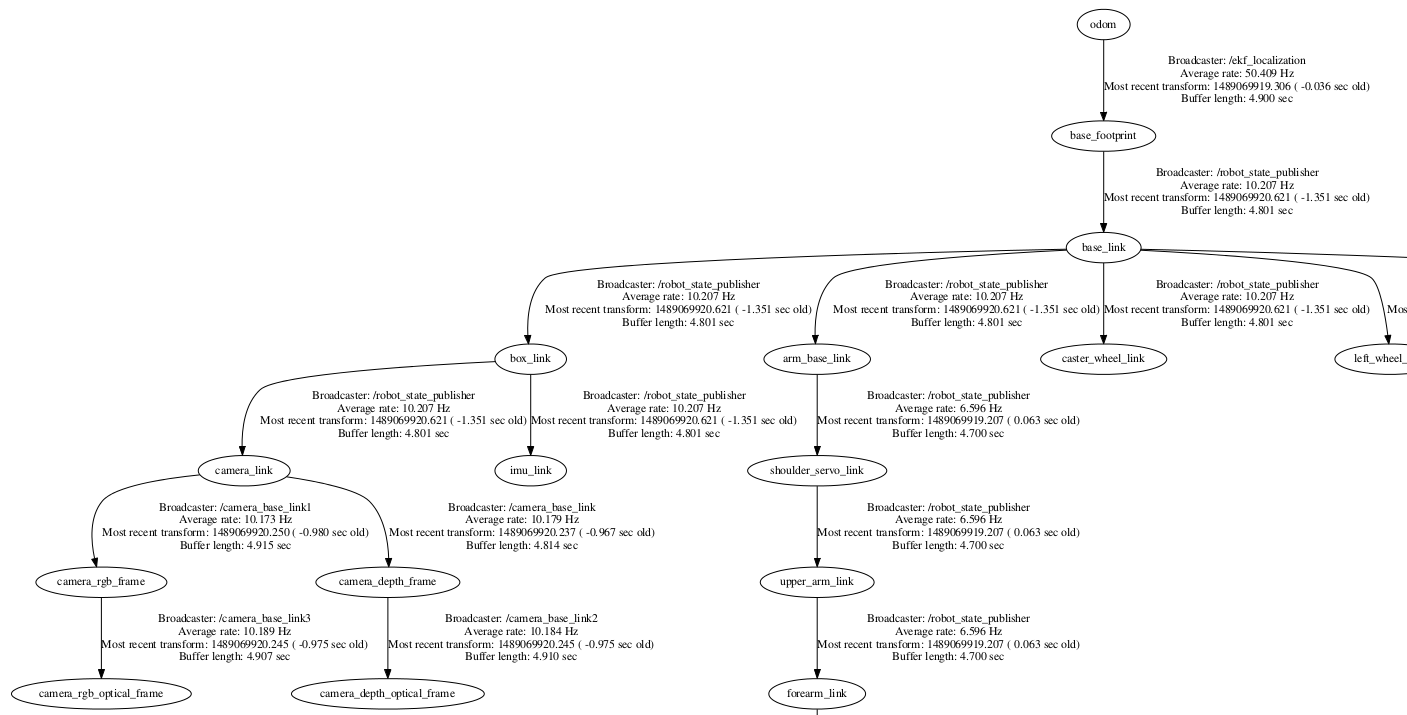
As you can see, rtabmap is not publishing any transform from map to odom. Is there anything which rtabmap would be waiting for in order to start publishing, or anything which could be stopping it?
I should also mention that If I do not run ekf_localization, but instead just use RTAB-Map's rgbd_odometry node to publish the odometry, with all other parameters set the same, then rtabmap starts publishing successfully.
I would really appreciate your help.
Thanks!

