Hi Brendan,
The launch file looks ok. Can you see rtabmap logging stuff on the terminal (at ~1Hz)? Similar to:
[ INFO] [1473362385.305401432]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2441s, Maps update=0.0046s pub=0.0001s (local map=1, WM=1)
[ INFO] [1473362386.312885154]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2171s, Maps update=0.0046s pub=0.0000s (local map=1, WM=1)
[...]
If no, it is maybe a message synchronization problem, generally because of a timestamp not set in the header of a subscribed topic.
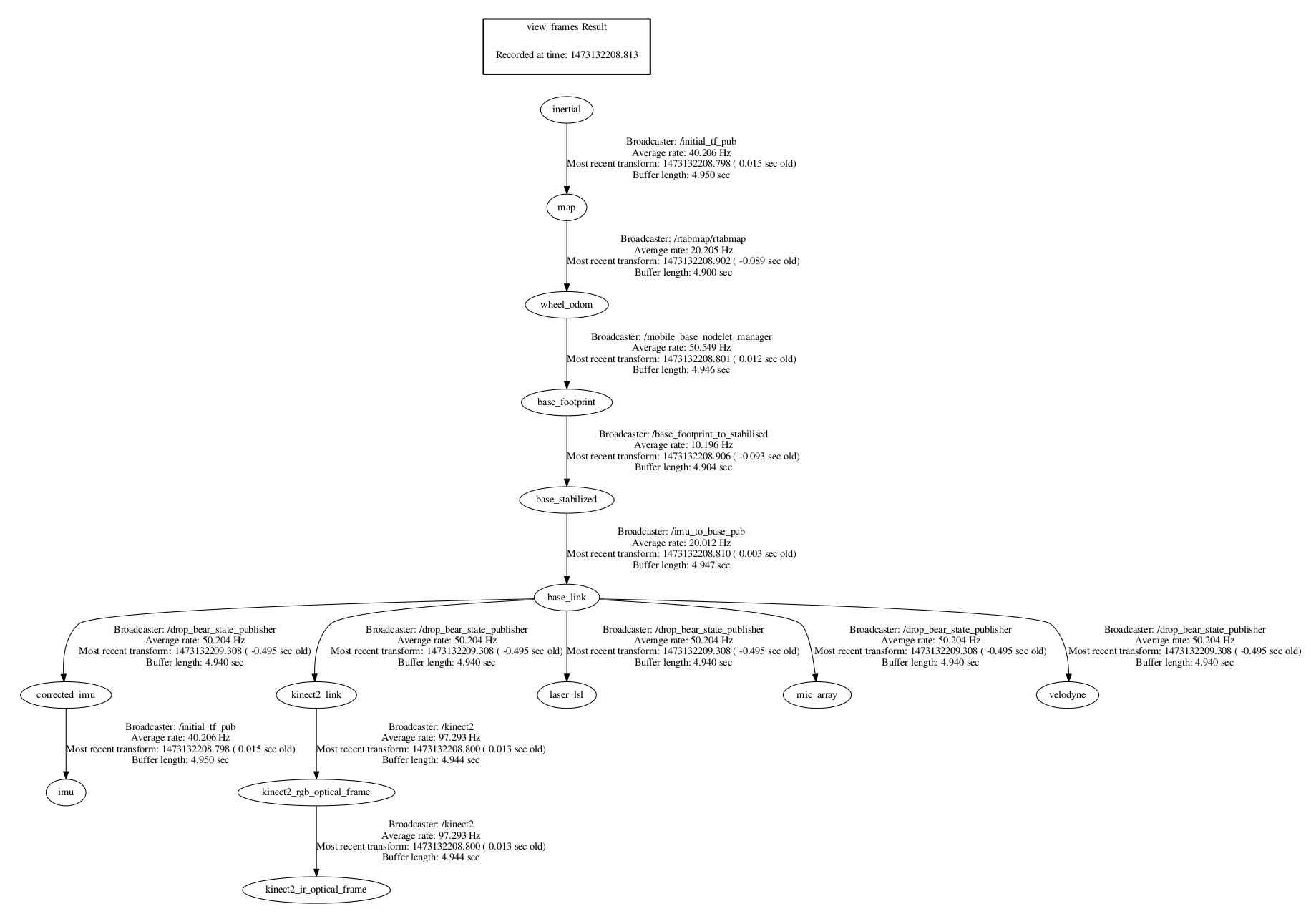
If yes, the occupancy grid created from the laser scan is called /rtabmap/grid_map. Are you using the rtabmap binaries (0.11.8) or latest from source (0.11.10)?. What do you mean with "pose does not get properly updated"? You have "RGBD/NeighborLinkRefining" enabled, so laser scans are used to refine the odometry message. Make sure the TF /base_footprint -> /laser is accurate and that odometry refers to /base_footprint frame. Setting "RGBD/NeighborLinkRefining" to false would disable odometry refining, so it would be similar to when "subscribe_scan" is false (to debug if it is a wrong laser TF problem).
With "RGBD/OptimizeFromGraphEnd" = true, the transform /map -> /wheel_odom will be always "Identity" even if there are loop closures or links refined because it is the map that is corrected instead of odometry.
cheers