Well i found my single command SUCCESS!
FROM ros:kinetic-ros-base
# install rtabmap packages
RUN apt-get update && apt-get install -y \
libfreenect-dev \
ros-kinetic-freenect-launch \
&& echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc \
&& rm -rf /var/lib/apt/lists/
CMD ["roslaunch","freenect_launch","freenect.launch", "depth_registration:=true"]
I used this docker file and run it with --net=host --privileged
I don't think i need to synchronize the clocks of the container and host (this might be a problem on mac os)
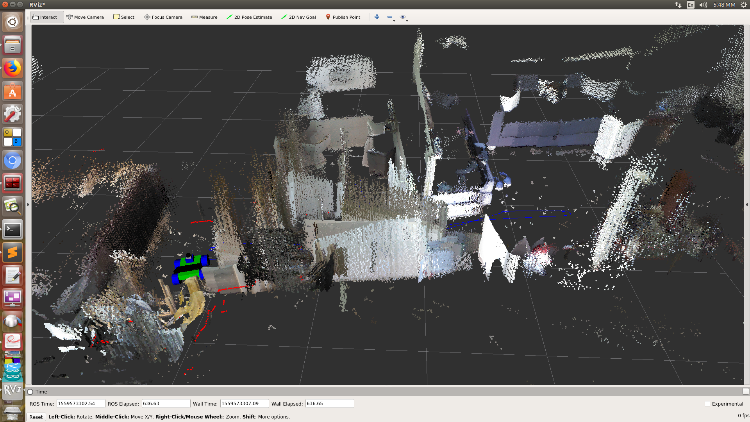
here is rgbd handheld example
Well now it breaks my rosserial communication when i try to visualize with rviz and the robot moves erratically i could try increasing the buffer size or lowering the hz but i would like to use the remote visualization with the compressed images,
instead of ssh -X the whole rviz, can i only the hz's of the compressed image without affecting the hz of the kinect?
Anyway thank you,
cheers
Panagiotis