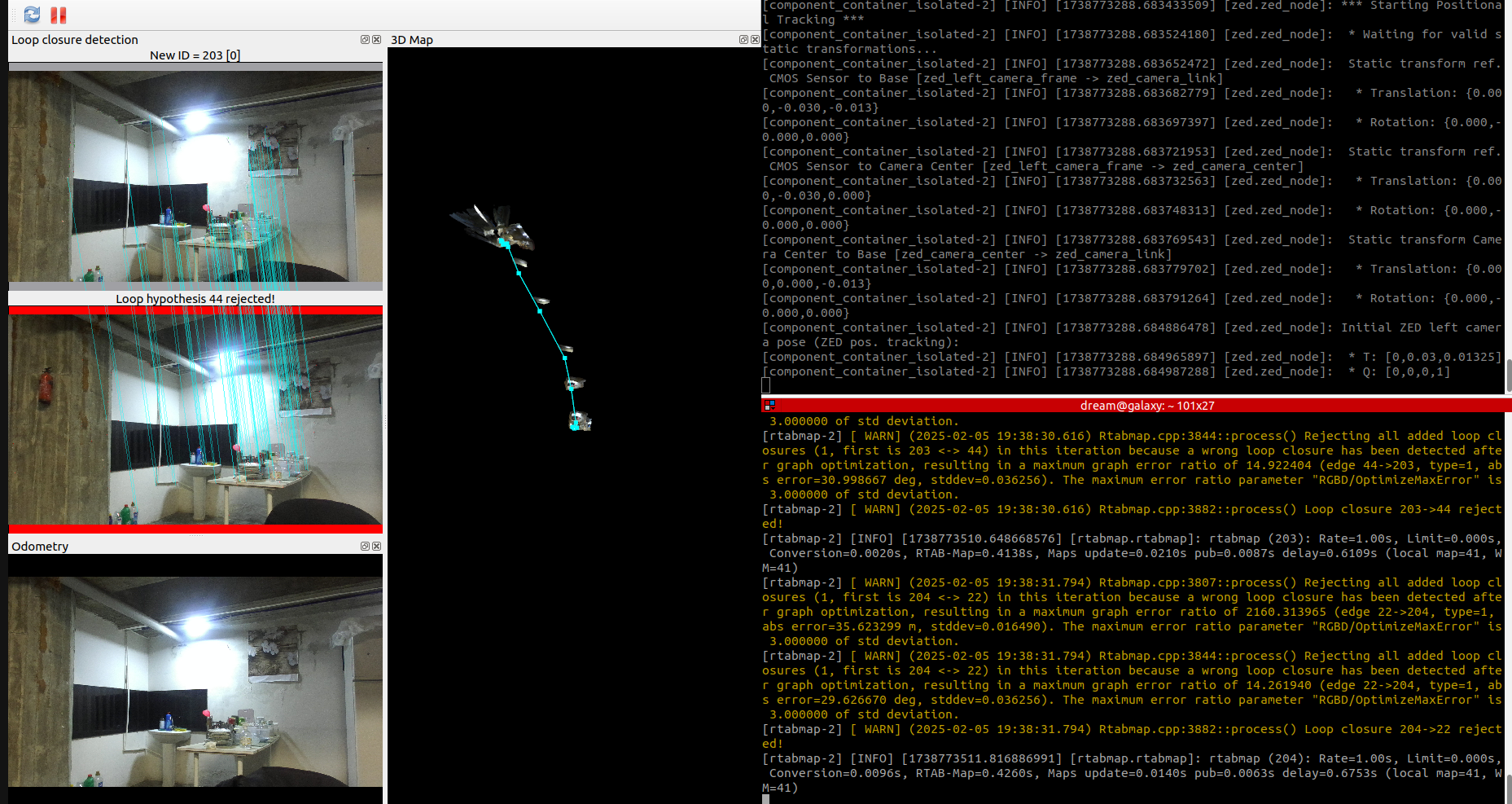
Hello, I am using RTAB-Map with a ZED Mini (ZEDM) camera, but I am having problems with camera drifting and loop closures not working. The camera slowly moves over time, even when it should stay in place. I also see that loop closures are rejected because of high error values. The error message says the loop closure error is too high (14.92), while the limit is 3.0. I tried increasing the RGBD/OptimizeMaxError value to 10.0 and 20.0, but the problem is still there.
I checked odometry (/odom topic), and it looks like the data is being published correctly. I also looked at TF frames, and they seem stable. However, the camera still drifts, and RTAB-Map does not fix it with loop closures. I also tried changing the feature detection method (Kp/DetectorStrategy) to ORB, SURF, and SIFT, but nothing changed.
I don’t know why this is happening. Could this be because of bad odometry from ZED Mini? How can I improve loop closure detection and prevent drifting? Are there any RTAB-Map settings I should change? I have attached a screenshot showing the problem.

