HI,
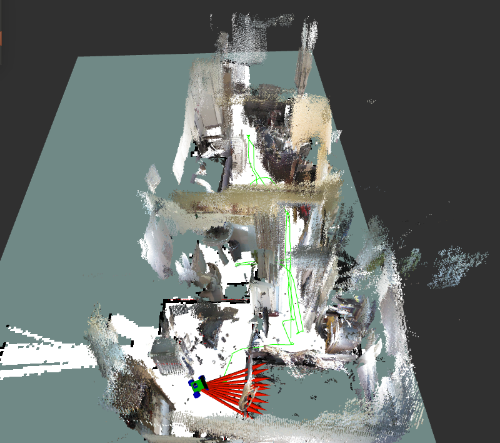
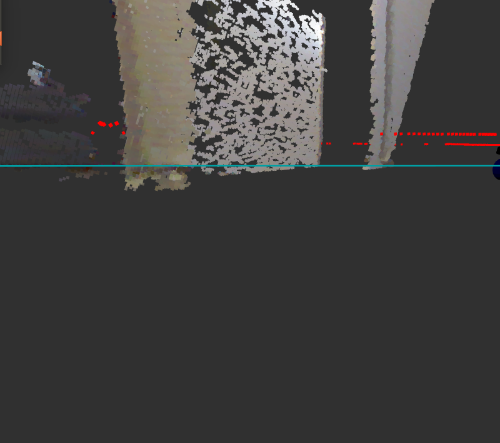
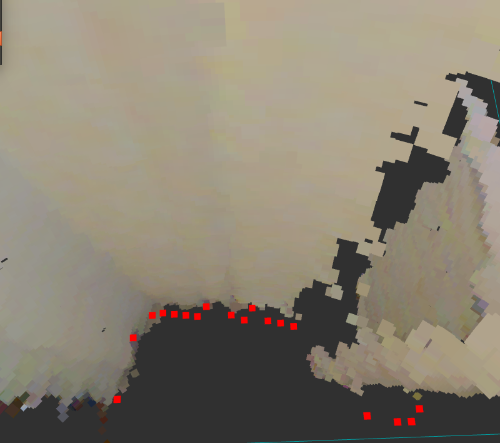
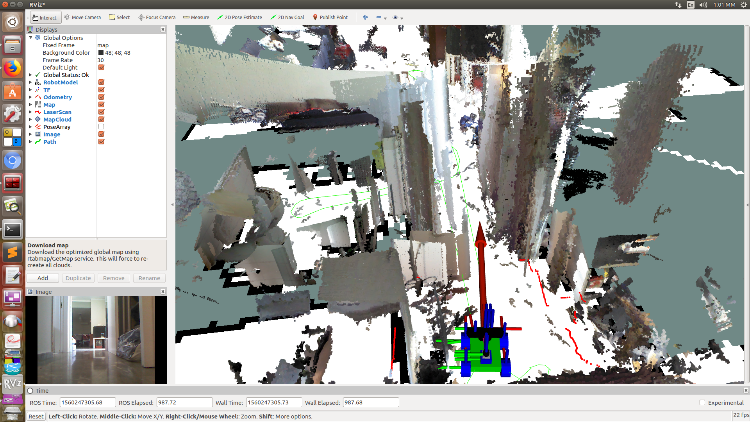
I tried my best to aligh with the ground and the laser but now my robot look's weird
is difficult to have an accurate xacro since i double taped the camera and the laser with some vibration on the camera
but the maps look better
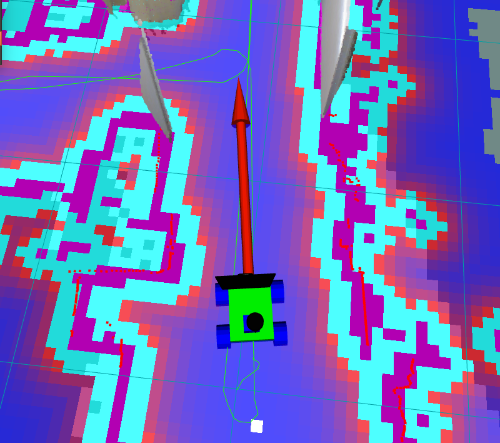
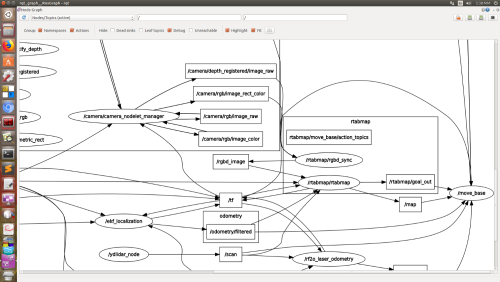
I tried to remap rtabmap/goal_out -> /move_base_simple/goal and /rtabmap/grid_map -> map and use_action_for_goal true
I tried many combination's but rviz 2D Nav goal doesn't work, rviz shell says it just send the goal
Although when i run the patrol node the robot moves to the goal position so the problem probably is that i have something misaligned ..
Lastly in localization mode the robot seems to localize based on scan, how best to solve the "robot kidnap problem" with scan and depth images (aka global localization with depth images (words) and local with scan?)
cheers,
Panagiotis