I cannot disclose yet one of a project I am working on, but yes RTAB-Map can work on a drone in large indoor space (volume around 70mx70mx100m). For all trajectory planning/exploration, the generated OctoMap topic from rtabmap is used.
However, yes, all demos/examples are often done on a 2d robot, so all default parameters are tuned for 2d mapping.
If you want an example with a drone, look at this example:
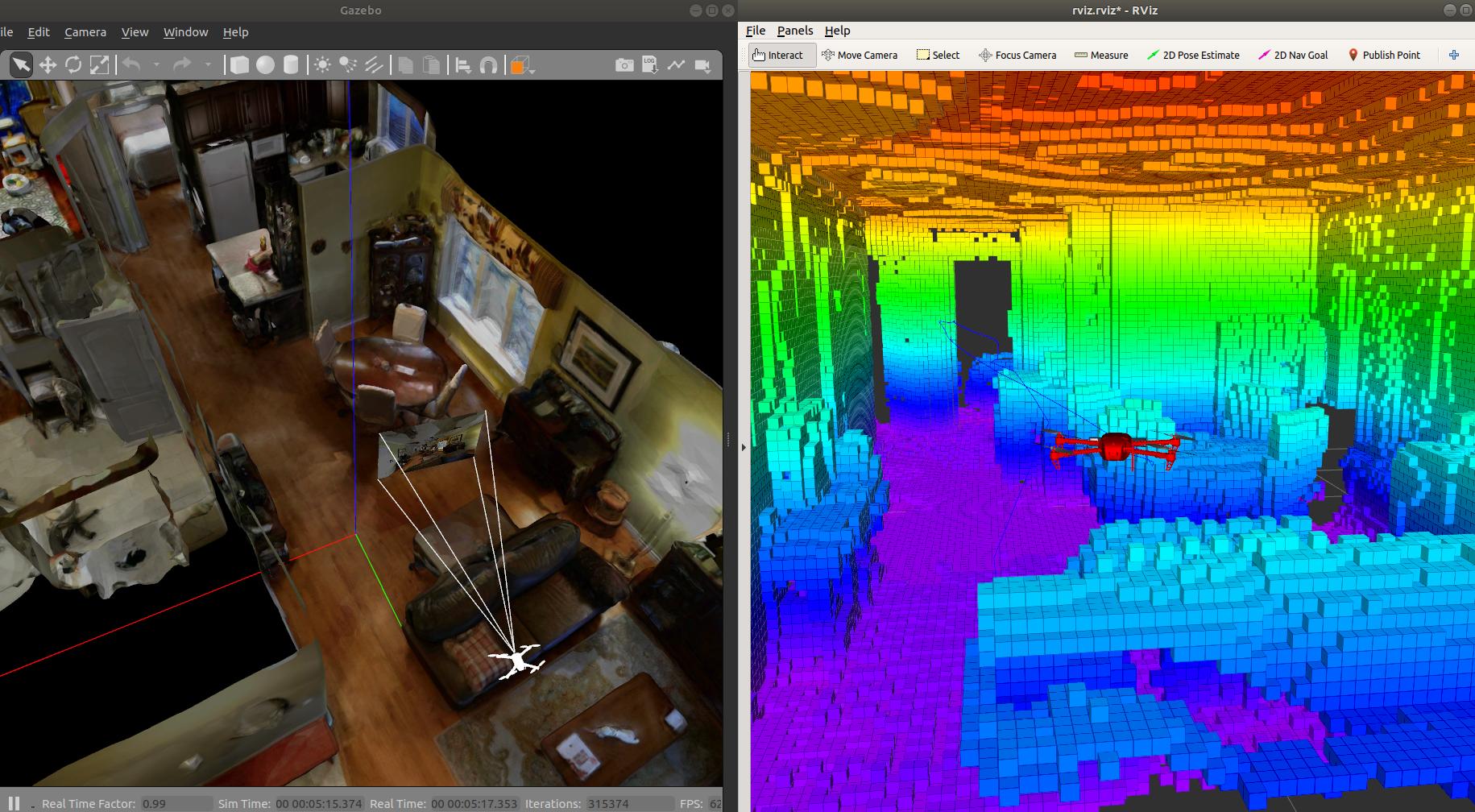
https://github.com/matlabbe/rtabmap_drone_exampleIt is however doing 2d navigation, but you could change the move_base node by a 3D planner and use the OctoMap instead of the 2D occupancy grid. Here an example using that demo (Grid/MaxGroundHeight and Grid/MaxObstacleHeight are set to 0 to have all obstacles in the OctoMap):
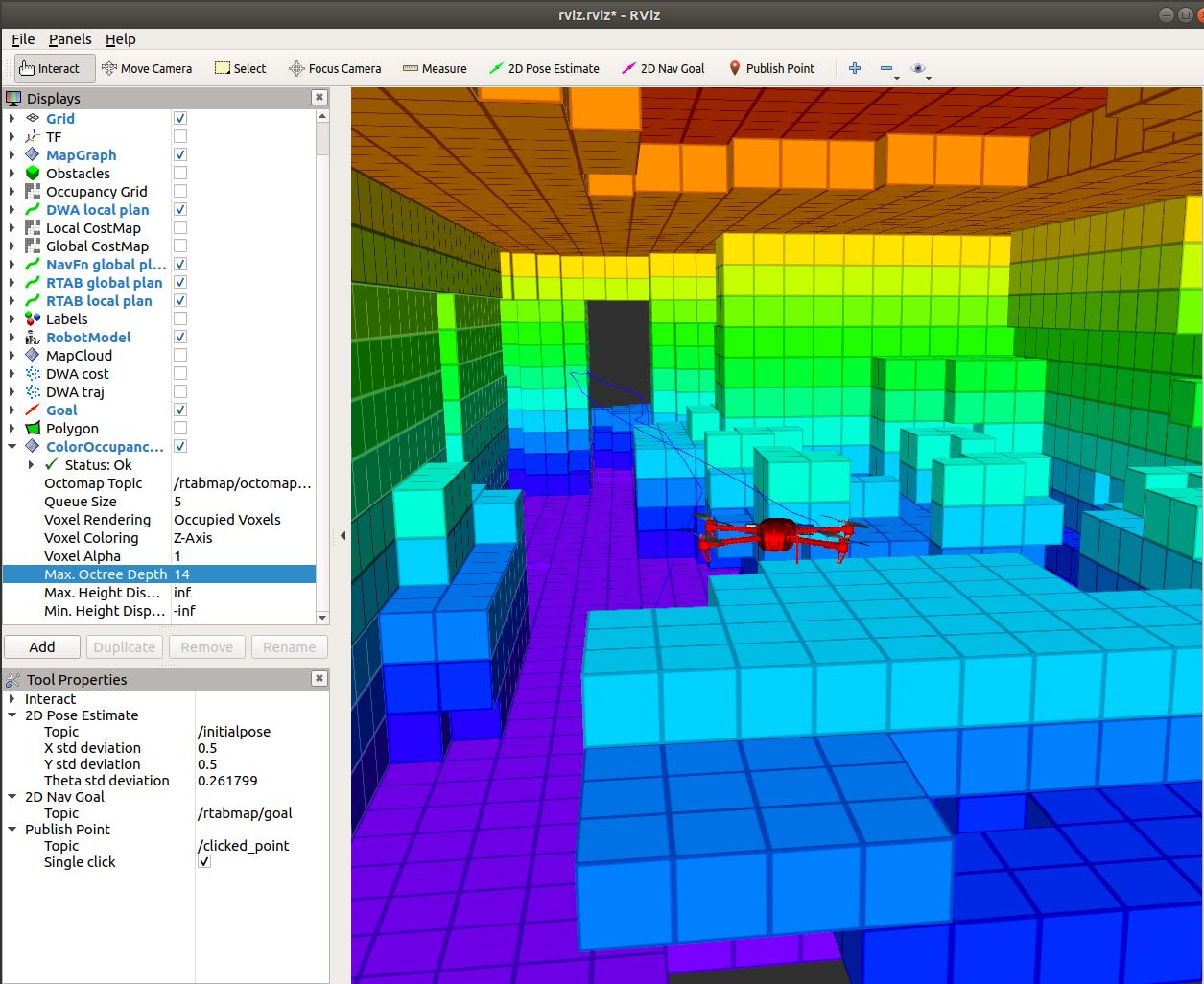
With OctoMap, we can increase the size of the voxel for extensive planning, here with a tree depth of 14:
If I have some time to get familiar with some standard 3D planning approaches (like OMPL / moveit), I could improve the rtabmap_drone_example with a 3D example using the OctoMap.
Other 3D examples using a car (though here it was just mapping):
http://official-rtab-map-forum.206.s1.nabble.com/Challenges-on-odometry-when-the-street-has-high-slopes-tp8000p8019.html http://official-rtab-map-forum.206.s1.nabble.com/Ouster-drive-under-the-rain-tp6496.html
http://official-rtab-map-forum.206.s1.nabble.com/Ouster-drive-under-the-rain-tp6496.html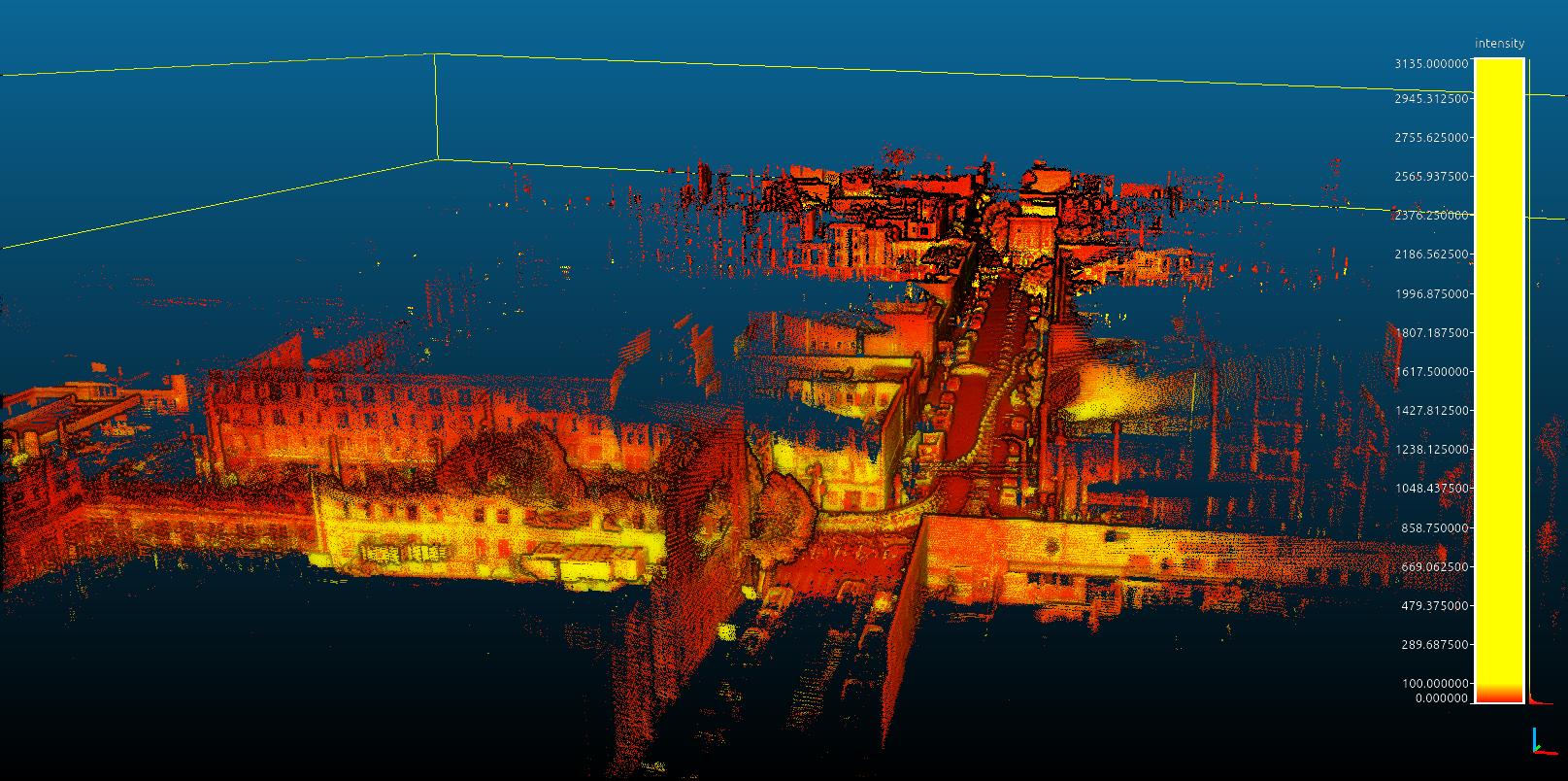
Regards,
Mathieu

