First of all, thank you for giving me a feedback.
- Can vins_estimator be configured to do only VIO (without relocalization)? External odometry should not contain relocalization to be compatible with rtabmap.
First, Vins_estimator does not have relocalization function.I think.
It have a loop detection function, but I didn't use it because it might make errors.
- What Tf are published by vins_estimator?
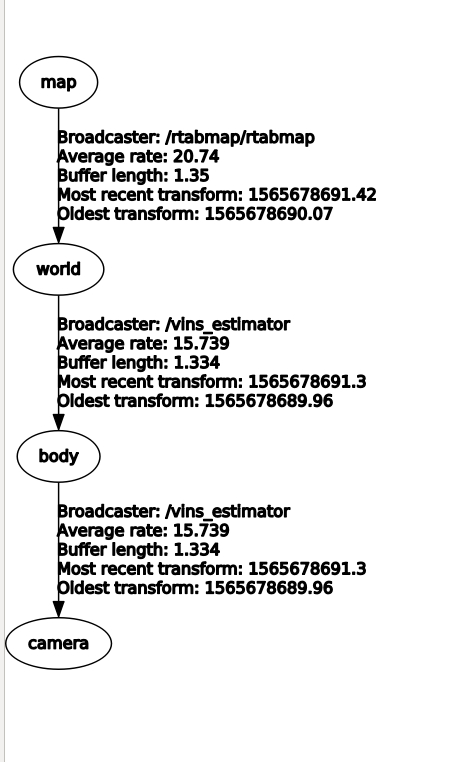
It seems that the TF of vins_estimator is made up of world, body and camera.
The picture is as follows.
- What contains /vins_estimator/odometry topic?
After checking, all values are taken, except that the twist.twist.angular is zero based on the Nav_msgs/Odometry Message.
I also tried one more attempt.
rosrun tf static_transform_publisher 0 0 0 0 0 1.57 camera camera_link 100 <-Added
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=true visual_odometry:=false odom_topic:=/vins_estimator/odometryAnd, two prizes are raised, one of them is still 90 degrees, and the other comes out in the right.
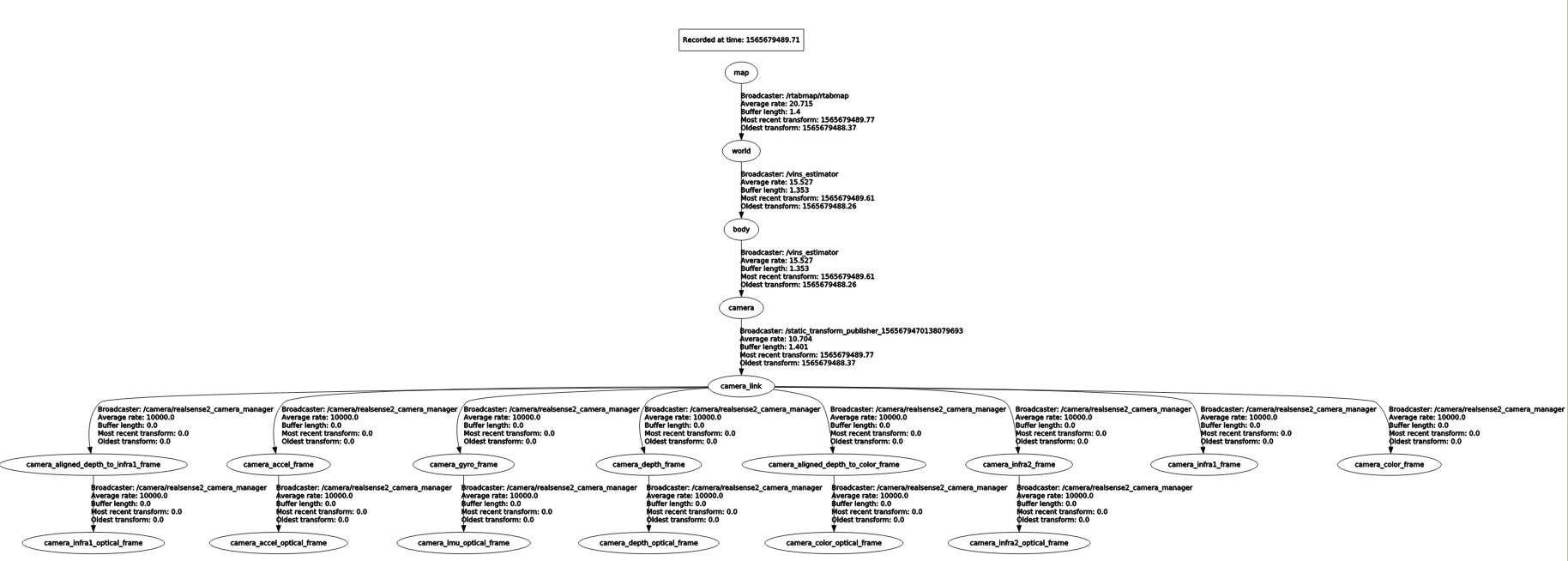
Also There is no error message on the terminal as I said earlier.
[ WARN] [1565142019.178442386]: Could not get transform from world to camera_link after 0.200000 seconds (for stamp=1565142018.912843)! Error="Could not find a connection between 'world' and 'camera_link' because they are not part of the same tree.Tf has two or more unconnected trees.. canTransform returned after 0.200332 timeout was 0.2." In this case, the TF is as follows.
Thank you for giving me another approach for the last time. I'll give it a try. (using rtabmap with VINS-FUSION support)


