Hi,
i'm new to rtab and ros.
i connected the intel D-435 camera, after updating all the needed drivers.
through the ROS-Rviz i can see raw camera image, though i can't start mapping.
i followed the rtab_ros tutorial (HandHeldMapping):
1. roscore
2. roslaunch realsense2_camera rs_camera.launch align_depth:=true
3. roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info rviz:=true
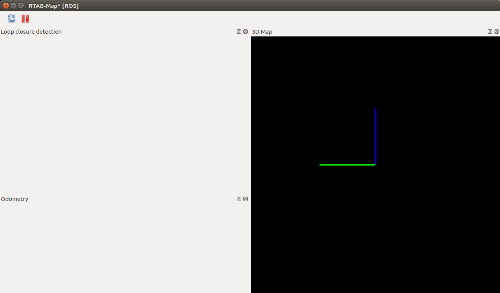
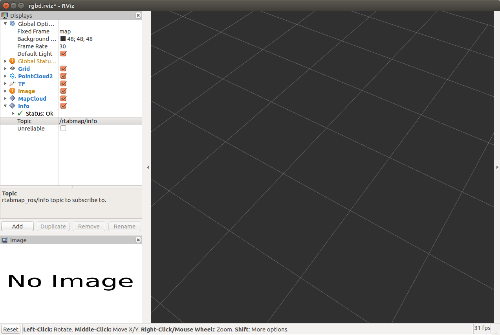
i get black screen in both rviz and rtabviz:
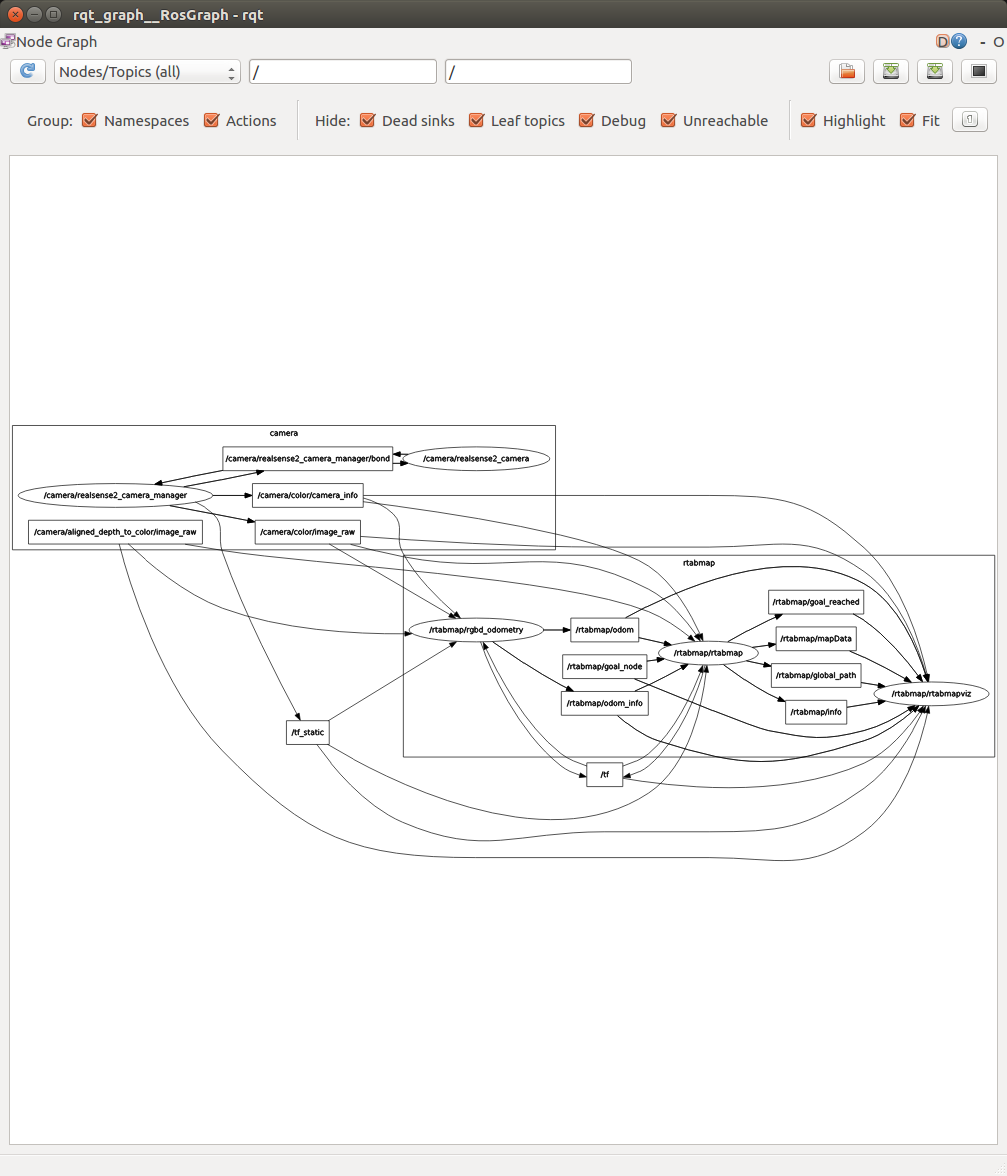
when i request graph this is what i get: