RTABMAP_ROS with ORBSLAM3


|
This post was updated on .
Hey, I have been trying to use RTABMAP_ROS with the ORBSLAM3 on a Pohang Canal dataset. I am working on Jetson Orin and build the libraries using docker. I will provide you with docker file, launch file and configuration files. Output shows Odom quality:0 and some transformations error. While I switch to Odom stratergy to 0. I can see RTABMAP viz working and some visualizations but nothing with ORBSLAM3. I am hoping to get some directions here to make it working.
Another thing how can I input camera1 to camera2 and imu to camera transformations. Usually ORBSLAM refers to config file where these extrinsics are given and I could find any parameter refering to that. I am still very new to rtabmap. Here is the output I get. root@jetson-orin:/rtabmap/catkin_ws# roslaunch rtabmap_demos pohang.launch ... logging to /root/.ros/log/04798952-1429-11ef-b19b-3c18a0d4bc69/roslaunch-jetson-orin-1074.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://jetson-orin:37073/ SUMMARY ======== PARAMETERS * /rosdistro: noetic * /rosversion: 1.16.0 * /rtabmap/rtabmap/Grid/DepthDecimation: 4 * /rtabmap/rtabmap/Grid/FlatObstacleDetected: true * /rtabmap/rtabmap/Kp/DetectorStrategy: 2 * /rtabmap/rtabmap/Kp/MaxDepth: 0 * /rtabmap/rtabmap/Odom/Strategy: 5 * /rtabmap/rtabmap/OdomORBSLAM/ GyroWalk: 4e-06 * /rtabmap/rtabmap/OdomORBSLAM/AccNoise: 0.01 * /rtabmap/rtabmap/OdomORBSLAM/AccWalk: 0.0002 * /rtabmap/rtabmap/OdomORBSLAM/GyroNoise: 0.005 * /rtabmap/rtabmap/OdomORBSLAM/Inertial: True * /rtabmap/rtabmap/OdomORBSLAM/MaxFeatures: 2000 * /rtabmap/rtabmap/OdomORBSLAM/SamplingRate: 100.0 * /rtabmap/rtabmap/OdomORBSLAM/ThDepth: 200.0 * /rtabmap/rtabmap/OdomORBSLAM/VocPath: /rtabmap/ORB_SLAM... * /rtabmap/rtabmap/RGBD/CreateOccupancyGrid: false * /rtabmap/rtabmap/Rtabmap/TimeThr: 700 * /rtabmap/rtabmap/Stereo/MaxDisparity: 5000 * /rtabmap/rtabmap/Vis/EstimationType: 1 * /rtabmap/rtabmap/Vis/FeatureType: 2 * /rtabmap/rtabmap/Vis/MaxDepth: 0 * /rtabmap/rtabmap/frame_id: stereo_left_link * /rtabmap/rtabmap/map_negative_poses_ignored: True * /rtabmap/rtabmap/queue_size: 30 * /rtabmap/rtabmap/subscribe_depth: False * /rtabmap/rtabmap/subscribe_rgbd: False * /rtabmap/rtabmap/subscribe_stereo: True * /rtabmap/rtabmap_viz/frame_id: stereo_left_link * /rtabmap/rtabmap_viz/queue_size: 10 * /rtabmap/rtabmap_viz/subscribe_odom_info: True * /rtabmap/rtabmap_viz/subscribe_rgbd: False * /rtabmap/rtabmap_viz/subscribe_stereo: True * /rtabmap/stereo_odometry/GFTT/MinDistance: 10 * /rtabmap/stereo_odometry/GFTT/QualityLevel: 0.00001 * /rtabmap/stereo_odometry/Kp/DetectorStrategy: 2 * /rtabmap/stereo_odometry/Odom/GuessMotion: true * /rtabmap/stereo_odometry/Odom/Strategy: 5 * /rtabmap/stereo_odometry/OdomF2M/MaxSize: 1000 * /rtabmap/stereo_odometry/OdomORBSLAM/ GyroWalk: 4e-06 * /rtabmap/stereo_odometry/OdomORBSLAM/AccNoise: 0.01 * /rtabmap/stereo_odometry/OdomORBSLAM/AccWalk: 0.0002 * /rtabmap/stereo_odometry/OdomORBSLAM/GyroNoise: 0.005 * /rtabmap/stereo_odometry/OdomORBSLAM/Inertial: True * /rtabmap/stereo_odometry/OdomORBSLAM/MaxFeatures: 2000 * /rtabmap/stereo_odometry/OdomORBSLAM/SamplingRate: 100.0 * /rtabmap/stereo_odometry/OdomORBSLAM/ThDepth: 200.0 * /rtabmap/stereo_odometry/OdomORBSLAM/VocPath: /rtabmap/ORB_SLAM... * /rtabmap/stereo_odometry/Stereo/MaxDisparity: 5000 * /rtabmap/stereo_odometry/Vis/EstimationType: 1 * /rtabmap/stereo_odometry/Vis/FeatureType: 2 * /rtabmap/stereo_odometry/Vis/MaxDepth: 0 * /rtabmap/stereo_odometry/Vis/MinInliers: 10 * /rtabmap/stereo_odometry/frame_id: stereo_left_link * /rtabmap/stereo_odometry/odom_frame_id: odom * /rtabmap/stereo_odometry/subscribe_rgbd: False * /use_sim_time: True * /yaml_to_camera_info_left/frame_id: stereo_left_link * /yaml_to_camera_info_left/yaml_path: /rtabmap/catkin_w... * /yaml_to_camera_info_right/frame_id: stereo_right_link * /yaml_to_camera_info_right/yaml_path: /rtabmap/catkin_w... NODES / republish_left (image_transport/republish) republish_right (image_transport/republish) yaml_to_camera_info_left (rtabmap_util/yaml_to_camera_info.py) yaml_to_camera_info_right (rtabmap_util/yaml_to_camera_info.py) /rtabmap/ rtabmap (rtabmap_slam/rtabmap) rtabmap_viz (rtabmap_viz/rtabmap_viz) stereo_odometry (rtabmap_odom/stereo_odometry) auto-starting new master process[master]: started with pid [1082] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 04798952-1429-11ef-b19b-3c18a0d4bc69 process[rosout-1]: started with pid [1092] started core service [/rosout] process[republish_left-2]: started with pid [1099] process[republish_right-3]: started with pid [1100] process[yaml_to_camera_info_left-4]: started with pid [1101] process[yaml_to_camera_info_right-5]: started with pid [1106] process[rtabmap/stereo_odometry-6]: started with pid [1112] process[rtabmap/rtabmap-7]: started with pid [1114] process[rtabmap/rtabmap_viz-8]: started with pid [1115] [ INFO] [1715935188.641366841]: Starting node... /rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_util/scripts/yaml_to_camera_info.py:10: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details. calib_data = yaml.load(file_handle) /rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_util/scripts/yaml_to_camera_info.py:10: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details. calib_data = yaml.load(file_handle) [ INFO] [1715935188.693703111]: Initializing nodelet with 12 worker threads. [ INFO] [1715935188.703229159]: Initializing nodelet with 12 worker threads. [ INFO] [1715935188.791147034]: Odometry: frame_id = stereo_left_link [ INFO] [1715935188.791207867]: Odometry: odom_frame_id = odom [ INFO] [1715935188.791228828]: Odometry: publish_tf = true [ INFO] [1715935188.791245308]: Odometry: wait_for_transform = true [ INFO] [1715935188.791267389]: Odometry: wait_for_transform_duration = 0.100000 [ INFO] [1715935188.791284381]: Odometry: log_to_rosout_level = 4 [ INFO] [1715935188.791340479]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1715935188.791367135]: Odometry: ground_truth_frame_id = [ INFO] [1715935188.791386560]: Odometry: ground_truth_base_frame_id = stereo_left_link [ INFO] [1715935188.791404960]: Odometry: config_path = [ INFO] [1715935188.791421120]: Odometry: publish_null_when_lost = true [ INFO] [1715935188.791437217]: Odometry: publish_compressed_sensor_data = false [ INFO] [1715935188.791451393]: Odometry: guess_frame_id = [ INFO] [1715935188.791468002]: Odometry: guess_min_translation = 0.000000 [ INFO] [1715935188.791485378]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1715935188.791499234]: Odometry: guess_min_time = 0.000000 [ INFO] [1715935188.791516163]: Odometry: expected_update_rate = 0.000000 Hz [ INFO] [1715935188.791531395]: Odometry: max_update_rate = 0.000000 Hz [ INFO] [1715935188.791548227]: Odometry: min_update_rate = 0.000000 Hz [ INFO] [1715935188.791564132]: Odometry: wait_imu_to_init = false [ INFO] [1715935188.791578660]: Odometry: sensor_data_compression_format = .jpg [ INFO] [1715935188.791594052]: Odometry: sensor_data_parallel_compression = true [ INFO] [1715935188.791632069]: Odometry: stereoParams_=1 visParams_=1 icpParams_=0 [ INFO] [1715935188.812200553]: Setting odometry parameter "GFTT/MinDistance"="10" [ INFO] [1715935188.812538449]: Setting odometry parameter "GFTT/QualityLevel"="0.00001" [ INFO] [1715935188.836637255]: Starting node... [ INFO] [1715935188.838562901]: Setting odometry parameter "Odom/GuessMotion"="true" [ INFO] [1715935188.852029329]: Setting odometry parameter "Odom/Strategy"="5" [ INFO] [1715935188.856091953]: Setting odometry parameter "OdomF2M/MaxSize"="1000" QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root' [ INFO] [1715935188.887025608]: rtabmap_viz: Using configuration from "/rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_demos/launch/config/rgbd_gui.ini" [ INFO] [1715935188.930825550]: Setting odometry parameter "OdomORBSLAM/AccNoise"="0.01" [ INFO] [1715935188.931647905]: Setting odometry parameter "OdomORBSLAM/AccWalk"="0.0002" [ INFO] [1715935188.934347009]: Setting odometry parameter "OdomORBSLAM/GyroNoise"="0.005" [ INFO] [1715935188.935842180]: Setting odometry parameter "OdomORBSLAM/Inertial"="true" [ INFO] [1715935188.937571852]: Setting odometry parameter "OdomORBSLAM/MaxFeatures"="2000" [ INFO] [1715935188.938364959]: Setting odometry parameter "OdomORBSLAM/SamplingRate"="100" [ INFO] [1715935188.939158098]: Setting odometry parameter "OdomORBSLAM/ThDepth"="200" [ INFO] [1715935188.939445112]: Setting odometry parameter "OdomORBSLAM/VocPath"="/rtabmap/ORB_SLAM3/Vocabulary/ORBvoc.txt" [ WARN] [1715935189.027080804]: Parameter "map_negative_poses_ignored" has been removed. Use "map_always_update" instead. [ INFO] [1715935189.031255110]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1715935189.031305864]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1715935189.031324936]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1715935189.031347145]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1715935189.031360937]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1715935189.031372521]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1715935189.031384009]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1715935189.031398826]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1715935189.032050617]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1715935189.063776290]: rtabmap: frame_id = stereo_left_link [ INFO] [1715935189.063835492]: rtabmap: map_frame_id = map [ INFO] [1715935189.063863524]: rtabmap: log_to_rosout_level = 4 [ INFO] [1715935189.063886053]: rtabmap: initial_pose = [ INFO] [1715935189.063900869]: rtabmap: use_action_for_goal = false [ INFO] [1715935189.063922982]: rtabmap: tf_delay = 0.050000 [ INFO] [1715935189.063936710]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1715935189.063948550]: rtabmap: odom_sensor_sync = false [ INFO] [1715935189.063962919]: rtabmap: pub_loc_pose_only_when_localizing = false [ INFO] [1715935189.065027520]: rtabmap: stereo_to_depth = false [ INFO] [1715935189.065069025]: rtabmap: gen_scan = false [ INFO] [1715935189.065087457]: rtabmap: gen_depth = false [ INFO] [1715935189.067213331]: Setting odometry parameter "Stereo/MaxDisparity"="5000" [ INFO] [1715935189.100744615]: Setting odometry parameter "Vis/EstimationType"="1" [ INFO] [1715935189.101230482]: Setting odometry parameter "Vis/FeatureType"="2" [ INFO] [1715935189.109824412]: Setting odometry parameter "Vis/MaxDepth"="0" [ INFO] [1715935189.115178426]: Setting odometry parameter "Vis/MinInliers"="10" [ INFO] [1715935189.160312222]: Setting RTAB-Map parameter "Grid/DepthDecimation"="4" [ INFO] [1715935189.162521714]: Setting RTAB-Map parameter "Grid/FlatObstacleDetected"="true" [ INFO] [1715935189.299802570]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="2" [ INFO] [1715935189.311187701]: Setting RTAB-Map parameter "Kp/MaxDepth"="0" [ INFO] [1715935189.378065464]: StereoOdometry: approx_sync = false [ INFO] [1715935189.378116762]: StereoOdometry: queue_size = 5 [ INFO] [1715935189.378134394]: StereoOdometry: subscribe_rgbd = false [ INFO] [1715935189.378157498]: StereoOdometry: keep_color = false [ INFO] [1715935189.422376073]: /rtabmap/stereo_odometry subscribed to (exact sync): /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info [ INFO] [1715935189.427009238]: Setting RTAB-Map parameter "RGBD/CreateOccupancyGrid"="false" [ INFO] [1715935189.486586797]: Setting RTAB-Map parameter "Rtabmap/TimeThr"="700" [ INFO] [1715935189.502368384]: Setting RTAB-Map parameter "Stereo/MaxDisparity"="5000" [ INFO] [1715935189.546316232]: Setting RTAB-Map parameter "Vis/EstimationType"="1" [ INFO] [1715935189.546690097]: Setting RTAB-Map parameter "Vis/FeatureType"="2" [ INFO] [1715935189.551557987]: Setting RTAB-Map parameter "Vis/MaxDepth"="0" [ INFO] [1715935189.712101662]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1715935189.712911601]: rtabmap: Deleted database "/root/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1715935189.712995891]: rtabmap: Using database from "/root/.ros/rtabmap.db" (0 MB). [ INFO] [1715935189.756897146]: rtabmap: Database version = "0.21.5". [ INFO] [1715935189.756999517]: rtabmap: SLAM mode (Mem/IncrementalMemory=true) [ WARN] [1715935189.791128862]: rtabmap: Parameters subscribe_stereo and subscribe_rgb cannot be true at the same time. Parameter subscribe_rgb is set to false. [ INFO] [1715935189.793221264]: /rtabmap/rtabmap: subscribe_depth = false [ INFO] [1715935189.793266737]: /rtabmap/rtabmap: subscribe_rgb = false [ INFO] [1715935189.793298961]: /rtabmap/rtabmap: subscribe_stereo = true [ INFO] [1715935189.793321362]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1715935189.793348467]: /rtabmap/rtabmap: subscribe_sensor_data = false [ INFO] [1715935189.793378579]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1715935189.793397428]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1715935189.793422132]: /rtabmap/rtabmap: subscribe_scan = false [ INFO] [1715935189.793446101]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1715935189.793459925]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1715935189.793473270]: /rtabmap/rtabmap: queue_size = 30 [ INFO] [1715935189.793498966]: /rtabmap/rtabmap: approx_sync = false [ INFO] [1715935189.793606265]: Setup stereo callback [ INFO] [1715935189.837027637]: /rtabmap/rtabmap subscribed to (exact sync): /stereo_odometry \ /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1715935189.991865993]: rtabmap 0.21.5 started... [ INFO] [1715935190.052336213]: rtabmap_viz: Reading parameters from the ROS server... [ INFO] [1715935190.290711119]: rtabmap_viz: Parameters read = 373 [ INFO] [1715935190.290767728]: rtabmap_viz: Parameters successfully read. [ INFO] [1715935190.505883432]: /rtabmap/rtabmap_viz: subscribe_depth = false [ INFO] [1715935190.505947177]: /rtabmap/rtabmap_viz: subscribe_rgb = false [ INFO] [1715935190.505970378]: /rtabmap/rtabmap_viz: subscribe_stereo = true [ INFO] [1715935190.505988042]: /rtabmap/rtabmap_viz: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1715935190.506006635]: /rtabmap/rtabmap_viz: subscribe_sensor_data = false [ INFO] [1715935190.506023627]: /rtabmap/rtabmap_viz: subscribe_odom_info = true [ INFO] [1715935190.506040748]: /rtabmap/rtabmap_viz: subscribe_user_data = false [ INFO] [1715935190.506055020]: /rtabmap/rtabmap_viz: subscribe_scan = false [ INFO] [1715935190.506066956]: /rtabmap/rtabmap_viz: subscribe_scan_cloud = false [ INFO] [1715935190.506081645]: /rtabmap/rtabmap_viz: subscribe_scan_descriptor = false [ INFO] [1715935190.506098093]: /rtabmap/rtabmap_viz: queue_size = 10 [ INFO] [1715935190.506115181]: /rtabmap/rtabmap_viz: approx_sync = false [ INFO] [1715935190.506176559]: Setup stereo callback [ INFO] [1715935190.588684703]: /rtabmap/rtabmap_viz subscribed to (exact sync): /stereo_odometry \ /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info \ /rtabmap/odom_info [ INFO] [1715935190.591896778]: rtabmap_viz started. [ WARN] [1715935194.889594641, 1710429083.060029280]: /rtabmap/stereo_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/stereo_odometry subscribed to (exact sync): /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info [ WARN] [1715935194.889646163, 1710429083.060029280]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap subscribed to (exact sync): /stereo_odometry \ /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info [ WARN] [1715935194.889735989, 1710429083.060029280]: /rtabmap/rtabmap_viz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmap_viz subscribed to (exact sync): /stereo_odometry \ /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info \ /rtabmap/odom_info [ INFO] [1715935195.140080559, 1710429083.205022107]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.006351s [ERROR] (2024-05-17 08:39:55.149) Rtabmap.cpp:1371::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 1 is ignored! [ INFO] [1715935195.149494731, 1710429083.215084518]: rtabmap (0): Rate=1.00s, Limit=0.700s, Conversion=0.0076s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=0, WM=0) [ INFO] [1715935195.225863299, 1710429083.289979452]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000296s [ INFO] [1715935195.315991836, 1710429083.381214671]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000295s [ WARN] [1715935195.339825257, 1710429083.411343503]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.269271)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.206321 timeout was 0.2.". [ INFO] [1715935195.488523834, 1710429083.554398428]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000286s [ INFO] [1715935195.539687686, 1710429083.604686963]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000285s [ WARN] [1715935195.543372956, 1710429083.614743134]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.369365)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.2034 timeout was 0.2.". [ INFO] [1715935195.617771557, 1710429083.685143594]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000283s [ INFO] [1715935195.719132645, 1710429083.785722168]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000291s [ WARN] [1715935195.744254416, 1710429083.815890585]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.469290)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.201147 timeout was 0.2.". [ INFO] [1715935195.819284457, 1710429083.883300927]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000263s [ INFO] [1715935195.915476496, 1710429083.983895821]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000283s [ WARN] [1715935195.952543313, 1710429084.024084920]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.569340)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.208194 timeout was 0.2.". [ INFO] [1715935196.019522094, 1710429084.084492859]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000294s [ INFO] [1715935196.119272550, 1710429084.185247978]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000280s [ERROR] (2024-05-17 08:39:56.123) Rtabmap.cpp:1371::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 11 is ignored! [ INFO] [1715935196.123348485, 1710429084.185247978]: rtabmap (0): Rate=1.00s, Limit=0.700s, Conversion=0.0036s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=0, WM=0) [ WARN] [1715935196.153922478, 1710429084.225483413]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.669364)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.201398 timeout was 0.2.". [ INFO] [1715935196.217516666, 1710429084.285835670]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000312s [ INFO] [1715935196.316048182, 1710429084.387222708]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000283s [ WARN] [1715935196.355788917, 1710429084.427450079]: Could not get transform from odom to stereo_left_link after 0.200000 seconds (for stamp=1625124349.769297)! Error="canTransform: target_frame odom does not exist. canTransform: source_frame stereo_left_link does not exist.. canTransform returned after 0.201967 timeout was 0.2.". |
|
|
Dockerfile
Dockerfile.Dockerfile docker-compose docker-compose.yml Patch file for orb-slam3 orbslam3_rtabmap_fix.patch launch file pohang.launch |
|
|
If you need the config files for Pohang dataset, I can provide that with small sample of dataset in a bag file.
Thank you very much for your efforts!!!! |
|
|
In DEBUG mode I get:
[DEBUG] (2024-05-22 15:36:09.146) Odometry.cpp:68::create() type=5 root@jetson-orin:/rtabmap/catkin_ws# roslaunch rtabmap_demos pohang_orb.launch ... logging to /root/.ros/log/0199a902-1851-11ef-ac37-3c18a0d4bc69/roslaunch-jetson-orin-3461.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://jetson-orin:43115/ SUMMARY ======== PARAMETERS * /rosdistro: noetic * /rosversion: 1.16.0 * /rtabmap/rtabmap/Grid/DepthDecimation: 4 * /rtabmap/rtabmap/Grid/FlatObstacleDetected: true * /rtabmap/rtabmap/Kp/DetectorStrategy: 2 * /rtabmap/rtabmap/Kp/MaxDepth: 0 * /rtabmap/rtabmap/Odom/Strategy: 5 * /rtabmap/rtabmap/OdomORBSLAM/AccNoise: 0.01 * /rtabmap/rtabmap/OdomORBSLAM/AccWalk: 0.0002 * /rtabmap/rtabmap/OdomORBSLAM/GyroNoise: 0.005 * /rtabmap/rtabmap/OdomORBSLAM/GyroWalk: 4e-06 * /rtabmap/rtabmap/OdomORBSLAM/Inertial: True * /rtabmap/rtabmap/OdomORBSLAM/MaxFeatures: 2000 * /rtabmap/rtabmap/OdomORBSLAM/SamplingRate: 100.0 * /rtabmap/rtabmap/OdomORBSLAM/ThDepth: 200.0 * /rtabmap/rtabmap/OdomORBSLAM/VocPath: /rtabmap/ORB_SLAM... * /rtabmap/rtabmap/RGBD/CreateOccupancyGrid: false * /rtabmap/rtabmap/Rtabmap/TimeThr: 700 * /rtabmap/rtabmap/Stereo/MaxDisparity: 5000 * /rtabmap/rtabmap/Vis/EstimationType: 1 * /rtabmap/rtabmap/Vis/FeatureType: 2 * /rtabmap/rtabmap/Vis/MaxDepth: 0 * /rtabmap/rtabmap/approx_sync: True * /rtabmap/rtabmap/frame_id: stereo_left_link * /rtabmap/rtabmap/map_negative_poses_ignored: True * /rtabmap/rtabmap/queue_size: 30 * /rtabmap/rtabmap/subscribe_depth: False * /rtabmap/rtabmap/subscribe_rgbd: False * /rtabmap/rtabmap/subscribe_stereo: True * /rtabmap/rtabmap_viz/frame_id: stereo_left_link * /rtabmap/rtabmap_viz/queue_size: 10 * /rtabmap/rtabmap_viz/subscribe_odom_info: True * /rtabmap/rtabmap_viz/subscribe_rgbd: False * /rtabmap/rtabmap_viz/subscribe_stereo: True * /rtabmap/stereo_odometry/GFTT/MinDistance: 10 * /rtabmap/stereo_odometry/GFTT/QualityLevel: 0.00001 * /rtabmap/stereo_odometry/Kp/DetectorStrategy: 2 * /rtabmap/stereo_odometry/Odom/GuessMotion: true * /rtabmap/stereo_odometry/Odom/Strategy: 5 * /rtabmap/stereo_odometry/OdomF2M/MaxSize: 1000 * /rtabmap/stereo_odometry/OdomORBSLAM/ GyroWalk: 4e-06 * /rtabmap/stereo_odometry/OdomORBSLAM/AccNoise: 0.01 * /rtabmap/stereo_odometry/OdomORBSLAM/AccWalk: 0.0002 * /rtabmap/stereo_odometry/OdomORBSLAM/GyroNoise: 0.005 * /rtabmap/stereo_odometry/OdomORBSLAM/Inertial: True * /rtabmap/stereo_odometry/OdomORBSLAM/MaxFeatures: 2000 * /rtabmap/stereo_odometry/OdomORBSLAM/SamplingRate: 100.0 * /rtabmap/stereo_odometry/OdomORBSLAM/ThDepth: 200.0 * /rtabmap/stereo_odometry/OdomORBSLAM/VocPath: /rtabmap/ORB_SLAM... * /rtabmap/stereo_odometry/Stereo/MaxDisparity: 5000 * /rtabmap/stereo_odometry/Vis/EstimationType: 1 * /rtabmap/stereo_odometry/Vis/FeatureType: 2 * /rtabmap/stereo_odometry/Vis/MaxDepth: 0 * /rtabmap/stereo_odometry/Vis/MinInliers: 10 * /rtabmap/stereo_odometry/approx_sync: True * /rtabmap/stereo_odometry/frame_id: stereo_left_link * /rtabmap/stereo_odometry/odom_frame_id: odom * /rtabmap/stereo_odometry/subscribe_rgbd: False * /rtabmap/stereo_odometry/subscribe_stereo: True * /use_sim_time: True * /yaml_to_camera_info_left/frame_id: stereo_left_link * /yaml_to_camera_info_left/yaml_path: /rtabmap/catkin_w... * /yaml_to_camera_info_right/frame_id: stereo_right_link * /yaml_to_camera_info_right/yaml_path: /rtabmap/catkin_w... NODES / republish_left (image_transport/republish) republish_right (image_transport/republish) yaml_to_camera_info_left (rtabmap_util/yaml_to_camera_info.py) yaml_to_camera_info_right (rtabmap_util/yaml_to_camera_info.py) /rtabmap/ link1_broadcaster (tf/static_transform_publisher) link2_broadcaster (tf/static_transform_publisher) rtabmap (rtabmap_slam/rtabmap) rtabmap_viz (rtabmap_viz/rtabmap_viz) stereo_odometry (rtabmap_odom/stereo_odometry) auto-starting new master process[master]: started with pid [3469] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 0199a902-1851-11ef-ac37-3c18a0d4bc69 process[rosout-1]: started with pid [3479] started core service [/rosout] process[republish_left-2]: started with pid [3486] process[republish_right-3]: started with pid [3487] process[yaml_to_camera_info_left-4]: started with pid [3488] process[yaml_to_camera_info_right-5]: started with pid [3490] process[rtabmap/link1_broadcaster-6]: started with pid [3499] process[rtabmap/link2_broadcaster-7]: started with pid [3501] process[rtabmap/stereo_odometry-8]: started with pid [3503] process[rtabmap/rtabmap-9]: started with pid [3508] process[rtabmap/rtabmap_viz-10]: started with pid [3514] INFO: cannot create a symlink to latest log directory: [Errno 17] File exists: '/root/.ros/log/0199a902-1851-11ef-ac37-3c18a0d4bc69' -> '/root/.ros/log/latest' /rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_util/scripts/yaml_to_camera_info.py:10: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details. calib_data = yaml.load(file_handle) /rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_util/scripts/yaml_to_camera_info.py:10: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details. calib_data = yaml.load(file_handle) [ INFO] (2024-05-22 15:36:08.521) PythonInterface.cpp:17::PythonInterface() Initialize python interpreter [ INFO] [1716392168.596635867]: Initializing nodelet with 12 worker threads. [ INFO] [1716392168.685229394]: Starting node... [ INFO] [1716392168.686958503]: Odometry: frame_id = stereo_left_link [ INFO] [1716392168.687048200]: Odometry: odom_frame_id = odom [ INFO] [1716392168.687070600]: Odometry: publish_tf = true [ INFO] [1716392168.687084872]: Odometry: wait_for_transform = true [ INFO] [1716392168.687106761]: Odometry: wait_for_transform_duration = 0.100000 [ INFO] [1716392168.687124937]: Odometry: log_to_rosout_level = 4 [ INFO] [1716392168.687200650]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1716392168.687225802]: Odometry: ground_truth_frame_id = [ INFO] [1716392168.687245802]: Odometry: ground_truth_base_frame_id = stereo_left_link [ INFO] [1716392168.687260010]: Odometry: config_path = [ INFO] [1716392168.687276235]: Odometry: publish_null_when_lost = true [ INFO] [1716392168.687289387]: Odometry: publish_compressed_sensor_data = false [ INFO] [1716392168.687302635]: Odometry: guess_frame_id = [ INFO] [1716392168.687316555]: Odometry: guess_min_translation = 0.000000 [ INFO] [1716392168.687332299]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1716392168.687349035]: Odometry: guess_min_time = 0.000000 [ INFO] [1716392168.687364684]: Odometry: expected_update_rate = 0.000000 Hz [ INFO] [1716392168.687379820]: Odometry: max_update_rate = 0.000000 Hz [ INFO] [1716392168.687394572]: Odometry: min_update_rate = 0.000000 Hz [ INFO] [1716392168.687409580]: Odometry: wait_imu_to_init = false [ INFO] [1716392168.687424172]: Odometry: sensor_data_compression_format = .jpg [ INFO] [1716392168.687438412]: Odometry: sensor_data_parallel_compression = true [ INFO] [1716392168.687476717]: Odometry: stereoParams_=1 visParams_=1 icpParams_=0 QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root' [ INFO] [1716392168.710077880]: Setting odometry parameter "GFTT/MinDistance"="10" [ INFO] [1716392168.710445788]: Setting odometry parameter "GFTT/QualityLevel"="0.00001" [ INFO] [1716392168.744420558]: rtabmap_viz: Using configuration from "/rtabmap/catkin_ws/src/rtabmap_ros/rtabmap_demos/launch/config/rgbd_gui.ini" [ INFO] [1716392168.752842930]: Setting odometry parameter "Odom/GuessMotion"="true" [ INFO] [1716392168.767205947]: Setting odometry parameter "Odom/Strategy"="5" [ INFO] [1716392168.771491854]: Setting odometry parameter "OdomF2M/MaxSize"="1000" [ INFO] [1716392168.840100249]: Setting odometry parameter "OdomORBSLAM/AccNoise"="0.01" [ INFO] [1716392168.841001636]: Setting odometry parameter "OdomORBSLAM/AccWalk"="0.0002" [ INFO] [1716392168.843972551]: Setting odometry parameter "OdomORBSLAM/GyroNoise"="0.005" [ INFO] [1716392168.845674235]: Setting odometry parameter "OdomORBSLAM/Inertial"="true" [ INFO] [1716392168.847542577]: Setting odometry parameter "OdomORBSLAM/MaxFeatures"="2000" [ INFO] [1716392168.848487996]: Setting odometry parameter "OdomORBSLAM/SamplingRate"="100" [ INFO] [1716392168.849375335]: Setting odometry parameter "OdomORBSLAM/ThDepth"="200" [ INFO] [1716392168.849742155]: Setting odometry parameter "OdomORBSLAM/VocPath"="/rtabmap/ORB_SLAM3/Vocabulary/ORBvoc.txt" [ INFO] [1716392168.954225534]: Setting odometry parameter "Stereo/MaxDisparity"="5000" [ INFO] [1716392168.977519378]: Setting odometry parameter "Vis/EstimationType"="1" [ INFO] [1716392168.977924663]: Setting odometry parameter "Vis/FeatureType"="2" [ INFO] [1716392168.983392471]: Setting odometry parameter "Vis/MaxDepth"="0" [ INFO] [1716392168.986875744]: Setting odometry parameter "Vis/MinInliers"="10" [DEBUG] (2024-05-22 15:36:09.146) Odometry.cpp:68::create() type=5 [ INFO] [1716392169.154955683]: StereoOdometry: approx_sync = true [ INFO] [1716392169.155017092]: StereoOdometry: approx_sync_max_interval = 0.000000 [ INFO] [1716392169.155038500]: StereoOdometry: queue_size = 5 [ INFO] [1716392169.155058501]: StereoOdometry: subscribe_rgbd = false [ INFO] [1716392169.155076389]: StereoOdometry: keep_color = false [ INFO] [1716392169.197461274]: /rtabmap/stereo_odometry subscribed to (approx sync): /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1716392169.897607726]: rtabmap_viz: Reading parameters from the ROS server... [ INFO] [1716392169.898693435]: rtabmap_viz: Cannot get rtabmap's parameters, waiting max 5 seconds in case the node has just been launched. [ WARN] [1716392174.929189367]: rtabmap_viz: rtabmap's parameters seem not all there yet! continuing with those there if some... [ WARN] [1716392174.929771486]: rtabmap_viz: Parameter BRIEF/Bytes not found [ WARN] [1716392174.930285380]: rtabmap_viz: Parameter BRISK/Octaves not found [ WARN] [1716392174.930727018]: rtabmap_viz: Parameter BRISK/PatternScale not found [ WARN] [1716392174.931111406]: rtabmap_viz: Parameter BRISK/Thresh not found [ WARN] [1716392174.931471666]: rtabmap_viz: Parameter Bayes/FullPredictionUpdate not found [ WARN] [1716392174.931820215]: rtabmap_viz: Parameter Bayes/PredictionLC not found [ WARN] [1716392174.932161691]: rtabmap_viz: Parameter Bayes/VirtualPlacePriorThr not found [ WARN] [1716392174.932503039]: rtabmap_viz: Parameter Db/TargetVersion not found [ WARN] [1716392174.932839075]: rtabmap_viz: Parameter DbSqlite3/CacheSize not found [ WARN] [1716392174.933189031]: rtabmap_viz: Parameter DbSqlite3/InMemory not found [ WARN] [1716392174.933531659]: rtabmap_viz: Parameter DbSqlite3/JournalMode not found [ WARN] [1716392174.933852367]: rtabmap_viz: Parameter DbSqlite3/Synchronous not found [ WARN] [1716392174.934190355]: rtabmap_viz: Parameter DbSqlite3/TempStore not found [ WARN] [1716392174.934573303]: rtabmap_viz: Parameter FAST/CV not found [ WARN] [1716392174.934957276]: rtabmap_viz: Parameter FAST/Gpu not found [ WARN] [1716392174.935298976]: rtabmap_viz: Parameter FAST/GpuKeypointsRatio not found [ WARN] [1716392174.935657828]: rtabmap_viz: Parameter FAST/GridCols not found [ WARN] [1716392174.935999208]: rtabmap_viz: Parameter FAST/GridRows not found [ WARN] [1716392174.936337164]: rtabmap_viz: Parameter FAST/MaxThreshold not found [ WARN] [1716392174.936668816]: rtabmap_viz: Parameter FAST/MinThreshold not found [ WARN] [1716392174.937000500]: rtabmap_viz: Parameter FAST/NonmaxSuppression not found [ WARN] [1716392174.937333048]: rtabmap_viz: Parameter FAST/Threshold not found [ WARN] [1716392174.937661244]: rtabmap_viz: Parameter FREAK/NOctaves not found [ WARN] [1716392174.937986751]: rtabmap_viz: Parameter FREAK/OrientationNormalized not found [ WARN] [1716392174.938321315]: rtabmap_viz: Parameter FREAK/PatternScale not found [ WARN] [1716392174.938659015]: rtabmap_viz: Parameter FREAK/ScaleNormalized not found [ WARN] [1716392174.938980555]: rtabmap_viz: Parameter GFTT/BlockSize not found [ WARN] [1716392174.939302799]: rtabmap_viz: Parameter GFTT/K not found [ WARN] [1716392174.939636755]: rtabmap_viz: Parameter GFTT/MinDistance not found [ WARN] [1716392174.939970071]: rtabmap_viz: Parameter GFTT/QualityLevel not found [ WARN] [1716392174.940292731]: rtabmap_viz: Parameter GFTT/UseHarrisDetector not found [ WARN] [1716392174.940622815]: rtabmap_viz: Parameter GMS/ThresholdFactor not found [ WARN] [1716392174.940948226]: rtabmap_viz: Parameter GMS/WithRotation not found [ WARN] [1716392174.941267110]: rtabmap_viz: Parameter GMS/WithScale not found [ WARN] [1716392174.941589930]: rtabmap_viz: Parameter GTSAM/IncRelinearizeSkip not found [ WARN] [1716392174.941919278]: rtabmap_viz: Parameter GTSAM/IncRelinearizeThreshold not found [ WARN] [1716392174.942236530]: rtabmap_viz: Parameter GTSAM/Incremental not found [ WARN] [1716392174.942576502]: rtabmap_viz: Parameter GTSAM/Optimizer not found [ WARN] [1716392174.942902361]: rtabmap_viz: Parameter Grid/3D not found [ WARN] [1716392174.943225789]: rtabmap_viz: Parameter Grid/CellSize not found [ WARN] [1716392174.943551681]: rtabmap_viz: Parameter Grid/ClusterRadius not found [ WARN] [1716392174.945256085]: rtabmap_viz: Parameter Grid/DepthRoiRatios not found [ WARN] [1716392174.946649574]: rtabmap_viz: Parameter Grid/FootprintHeight not found [ WARN] [1716392174.946983978]: rtabmap_viz: Parameter Grid/FootprintLength not found [ WARN] [1716392174.947306382]: rtabmap_viz: Parameter Grid/FootprintWidth not found [ WARN] [1716392174.947626961]: rtabmap_viz: Parameter Grid/GroundIsObstacle not found [ WARN] [1716392174.947942773]: rtabmap_viz: Parameter Grid/MapFrameProjection not found [ WARN] [1716392174.948264121]: rtabmap_viz: Parameter Grid/MaxGroundAngle not found [ WARN] [1716392174.948586685]: rtabmap_viz: Parameter Grid/MaxGroundHeight not found [ WARN] [1716392174.948907296]: rtabmap_viz: Parameter Grid/MaxObstacleHeight not found [ WARN] [1716392174.949228036]: rtabmap_viz: Parameter Grid/MinClusterSize not found [ WARN] [1716392174.949542376]: rtabmap_viz: Parameter Grid/MinGroundHeight not found [ WARN] [1716392174.949869932]: rtabmap_viz: Parameter Grid/NoiseFilteringMinNeighbors not found [ WARN] [1716392174.950185744]: rtabmap_viz: Parameter Grid/NoiseFilteringRadius not found [ WARN] [1716392174.950526964]: rtabmap_viz: Parameter Grid/NormalK not found [ WARN] [1716392174.950861336]: rtabmap_viz: Parameter Grid/NormalsSegmentation not found [ WARN] [1716392174.951175067]: rtabmap_viz: Parameter Grid/PreVoxelFiltering not found [ WARN] [1716392174.951495391]: rtabmap_viz: Parameter Grid/RangeMax not found [ WARN] [1716392174.951816739]: rtabmap_viz: Parameter Grid/RangeMin not found [ WARN] [1716392174.952146343]: rtabmap_viz: Parameter Grid/RayTracing not found [ WARN] [1716392174.952481547]: rtabmap_viz: Parameter Grid/Scan2dUnknownSpaceFilled not found [ WARN] [1716392174.952809295]: rtabmap_viz: Parameter Grid/ScanDecimation not found [ WARN] [1716392174.953129618]: rtabmap_viz: Parameter Grid/Sensor not found [ WARN] [1716392174.953448662]: rtabmap_viz: Parameter GridGlobal/AltitudeDelta not found [ WARN] [1716392174.953794874]: rtabmap_viz: Parameter GridGlobal/Eroded not found [ WARN] [1716392174.954111102]: rtabmap_viz: Parameter GridGlobal/FloodFillDepth not found [ WARN] [1716392174.954443426]: rtabmap_viz: Parameter GridGlobal/FootprintRadius not found [ WARN] [1716392174.954777382]: rtabmap_viz: Parameter GridGlobal/MaxNodes not found [ WARN] [1716392174.955107786]: rtabmap_viz: Parameter GridGlobal/MinSize not found [ WARN] [1716392174.955432046]: rtabmap_viz: Parameter GridGlobal/OccupancyThr not found [ WARN] [1716392174.955756113]: rtabmap_viz: Parameter GridGlobal/ProbClampingMax not found [ WARN] [1716392174.956079445]: rtabmap_viz: Parameter GridGlobal/ProbClampingMin not found [ WARN] [1716392174.956404281]: rtabmap_viz: Parameter GridGlobal/ProbHit not found [ WARN] [1716392174.956716029]: rtabmap_viz: Parameter GridGlobal/ProbMiss not found [ WARN] [1716392174.957056257]: rtabmap_viz: Parameter GridGlobal/UpdateError not found [ WARN] [1716392174.957364420]: rtabmap_viz: Parameter Icp/CCFilterOutFarthestPoints not found [ WARN] [1716392174.957666664]: rtabmap_viz: Parameter Icp/CCMaxFinalRMS not found [ WARN] [1716392174.957983404]: rtabmap_viz: Parameter Icp/CCSamplingLimit not found [ WARN] [1716392174.958305935]: rtabmap_viz: Parameter Icp/CorrespondenceRatio not found [ WARN] [1716392174.958655764]: rtabmap_viz: Parameter Icp/DebugExportFormat not found [ WARN] [1716392174.958980247]: rtabmap_viz: Parameter Icp/DownsamplingStep not found [ WARN] [1716392174.959297851]: rtabmap_viz: Parameter Icp/Epsilon not found [ WARN] [1716392174.959618591]: rtabmap_viz: Parameter Icp/FiltersEnabled not found [ WARN] [1716392174.959930467]: rtabmap_viz: Parameter Icp/Force4DoF not found [ WARN] [1716392174.960231590]: rtabmap_viz: Parameter Icp/Iterations not found [ WARN] [1716392174.960531658]: rtabmap_viz: Parameter Icp/MaxCorrespondenceDistance not found [ WARN] [1716392174.960845902]: rtabmap_viz: Parameter Icp/MaxRotation not found [ WARN] [1716392174.961167793]: rtabmap_viz: Parameter Icp/MaxTranslation not found [ WARN] [1716392174.961465301]: rtabmap_viz: Parameter Icp/OutlierRatio not found [ WARN] [1716392174.961767928]: rtabmap_viz: Parameter Icp/PMConfig not found [ WARN] [1716392174.962070364]: rtabmap_viz: Parameter Icp/PMMatcherEpsilon not found [ WARN] [1716392174.962369472]: rtabmap_viz: Parameter Icp/PMMatcherIntensity not found [ WARN] [1716392174.962681283]: rtabmap_viz: Parameter Icp/PMMatcherKnn not found [ WARN] [1716392174.962984679]: rtabmap_viz: Parameter Icp/PointToPlane not found [ WARN] [1716392174.963353451]: rtabmap_viz: Parameter Icp/PointToPlaneGroundNormalsUp not found [ WARN] [1716392174.963654543]: rtabmap_viz: Parameter Icp/PointToPlaneK not found [ WARN] [1716392174.963952114]: rtabmap_viz: Parameter Icp/PointToPlaneLowComplexityStrategy not found [ WARN] [1716392174.964250198]: rtabmap_viz: Parameter Icp/PointToPlaneMinComplexity not found [ WARN] [1716392174.964553145]: rtabmap_viz: Parameter Icp/PointToPlaneRadius not found [ WARN] [1716392174.964879005]: rtabmap_viz: Parameter Icp/RangeMax not found [ WARN] [1716392174.965191137]: rtabmap_viz: Parameter Icp/RangeMin not found [ WARN] [1716392174.965558629]: rtabmap_viz: Parameter Icp/ReciprocalCorrespondences not found [ WARN] [1716392174.965884489]: rtabmap_viz: Parameter Icp/Strategy not found [ WARN] [1716392174.966222765]: rtabmap_viz: Parameter Icp/VoxelSize not found [ WARN] [1716392174.966568785]: rtabmap_viz: Parameter ImuFilter/ComplementaryBiasAlpha not found [ WARN] [1716392174.966883029]: rtabmap_viz: Parameter ImuFilter/ComplementaryDoAdpativeGain not found [ WARN] [1716392174.967204345]: rtabmap_viz: Parameter ImuFilter/ComplementaryDoBiasEstimation not found [ WARN] [1716392174.967539869]: rtabmap_viz: Parameter ImuFilter/ComplementaryGainAcc not found [ WARN] [1716392174.967866016]: rtabmap_viz: Parameter ImuFilter/MadgwickGain not found [ WARN] [1716392174.968171396]: rtabmap_viz: Parameter ImuFilter/MadgwickZeta not found [ WARN] [1716392174.968487944]: rtabmap_viz: Parameter KAZE/Diffusivity not found [ WARN] [1716392174.968794251]: rtabmap_viz: Parameter KAZE/Extended not found [ WARN] [1716392174.969099535]: rtabmap_viz: Parameter KAZE/NOctaveLayers not found [ WARN] [1716392174.969414931]: rtabmap_viz: Parameter KAZE/NOctaves not found [ WARN] [1716392174.969720214]: rtabmap_viz: Parameter KAZE/Threshold not found [ WARN] [1716392174.970048218]: rtabmap_viz: Parameter KAZE/Upright not found [ WARN] [1716392174.970422303]: rtabmap_viz: Parameter Kp/BadSignRatio not found [ WARN] [1716392174.970800643]: rtabmap_viz: Parameter Kp/ByteToFloat not found [ WARN] [1716392174.972781723]: rtabmap_viz: Parameter Kp/DictionaryPath not found [ WARN] [1716392174.973106686]: rtabmap_viz: Parameter Kp/FlannRebalancingFactor not found [ WARN] [1716392174.973464739]: rtabmap_viz: Parameter Kp/GridCols not found [ WARN] [1716392174.973774246]: rtabmap_viz: Parameter Kp/GridRows not found [ WARN] [1716392174.974119146]: rtabmap_viz: Parameter Kp/IncrementalDictionary not found [ WARN] [1716392174.974410446]: rtabmap_viz: Parameter Kp/IncrementalFlann not found [ WARN] [1716392174.976114690]: rtabmap_viz: Parameter Kp/MaxFeatures not found [ WARN] [1716392174.976410501]: rtabmap_viz: Parameter Kp/MinDepth not found [ WARN] [1716392174.976709161]: rtabmap_viz: Parameter Kp/NNStrategy not found [ WARN] [1716392174.976995148]: rtabmap_viz: Parameter Kp/NewWordsComparedTogether not found [ WARN] [1716392174.977274960]: rtabmap_viz: Parameter Kp/NndrRatio not found [ WARN] [1716392174.977547795]: rtabmap_viz: Parameter Kp/Parallelized not found [ WARN] [1716392174.977826742]: rtabmap_viz: Parameter Kp/RoiRatios not found [ WARN] [1716392174.978104729]: rtabmap_viz: Parameter Kp/SSC not found [ WARN] [1716392174.978379549]: rtabmap_viz: Parameter Kp/SubPixEps not found [ WARN] [1716392174.978678400]: rtabmap_viz: Parameter Kp/SubPixIterations not found [ WARN] [1716392174.978956291]: rtabmap_viz: Parameter Kp/SubPixWinSize not found [ WARN] [1716392174.979229863]: rtabmap_viz: Parameter Kp/TfIdfLikelihoodUsed not found [ WARN] [1716392174.979503210]: rtabmap_viz: Parameter Marker/CornerRefinementMethod not found [ WARN] [1716392174.979776717]: rtabmap_viz: Parameter Marker/Dictionary not found [ WARN] [1716392174.980051728]: rtabmap_viz: Parameter Marker/Length not found [ WARN] [1716392174.980324852]: rtabmap_viz: Parameter Marker/MaxDepthError not found [ WARN] [1716392174.980595415]: rtabmap_viz: Parameter Marker/MaxRange not found [ WARN] [1716392174.980864730]: rtabmap_viz: Parameter Marker/MinRange not found [ WARN] [1716392174.981136061]: rtabmap_viz: Parameter Marker/Priors not found [ WARN] [1716392174.981405696]: rtabmap_viz: Parameter Marker/PriorsVarianceAngular not found [ WARN] [1716392174.981675748]: rtabmap_viz: Parameter Marker/PriorsVarianceLinear not found [ WARN] [1716392174.981946759]: rtabmap_viz: Parameter Marker/VarianceAngular not found [ WARN] [1716392174.982218634]: rtabmap_viz: Parameter Marker/VarianceLinear not found [ WARN] [1716392174.982513614]: rtabmap_viz: Parameter Mem/BadSignaturesIgnored not found [ WARN] [1716392174.982789009]: rtabmap_viz: Parameter Mem/BinDataKept not found [ WARN] [1716392174.983062068]: rtabmap_viz: Parameter Mem/CompressionParallelized not found [ WARN] [1716392174.983337463]: rtabmap_viz: Parameter Mem/CovOffDiagIgnored not found [ WARN] [1716392174.983612315]: rtabmap_viz: Parameter Mem/DepthAsMask not found [ WARN] [1716392174.983882974]: rtabmap_viz: Parameter Mem/GenerateIds not found [ WARN] [1716392174.984156065]: rtabmap_viz: Parameter Mem/GlobalDescriptorStrategy not found [ WARN] [1716392174.984431620]: rtabmap_viz: Parameter Mem/ImageCompressionFormat not found [ WARN] [1716392174.984701383]: rtabmap_viz: Parameter Mem/ImageKept not found [ WARN] [1716392174.984971755]: rtabmap_viz: Parameter Mem/ImagePostDecimation not found [ WARN] [1716392174.985244334]: rtabmap_viz: Parameter Mem/ImagePreDecimation not found [ WARN] [1716392174.985516273]: rtabmap_viz: Parameter Mem/IncrementalMemory not found [ WARN] [1716392174.985786292]: rtabmap_viz: Parameter Mem/InitWMWithAllNodes not found [ WARN] [1716392174.986055191]: rtabmap_viz: Parameter Mem/IntermediateNodeDataKept not found [ WARN] [1716392174.986381051]: rtabmap_viz: Parameter Mem/LaserScanDownsampleStepSize not found [ WARN] [1716392174.986698431]: rtabmap_viz: Parameter Mem/LaserScanNormalK not found [ WARN] [1716392174.987003587]: rtabmap_viz: Parameter Mem/LaserScanNormalRadius not found [ WARN] [1716392174.987309286]: rtabmap_viz: Parameter Mem/LaserScanVoxelSize not found [ WARN] [1716392174.987619754]: rtabmap_viz: Parameter Mem/LocalizationDataSaved not found [ WARN] [1716392174.987927021]: rtabmap_viz: Parameter Mem/MapLabelsAdded not found [ WARN] [1716392174.988239057]: rtabmap_viz: Parameter Mem/NotLinkedNodesKept not found [ WARN] [1716392174.988550805]: rtabmap_viz: Parameter Mem/RawDescriptorsKept not found [ WARN] [1716392174.988860217]: rtabmap_viz: Parameter Mem/RecentWmRatio not found [ WARN] [1716392174.989166460]: rtabmap_viz: Parameter Mem/ReduceGraph not found [ WARN] [1716392174.989472096]: rtabmap_viz: Parameter Mem/RehearsalIdUpdatedToNewOne not found [ WARN] [1716392174.989772643]: rtabmap_viz: Parameter Mem/RehearsalSimilarity not found [ WARN] [1716392174.990072391]: rtabmap_viz: Parameter Mem/RehearsalWeightIgnoredWhileMoving not found [ WARN] [1716392174.990371018]: rtabmap_viz: Parameter Mem/RotateImagesUpsideUp not found [ WARN] [1716392174.990692878]: rtabmap_viz: Parameter Mem/STMSize not found [ WARN] [1716392174.990996018]: rtabmap_viz: Parameter Mem/SaveDepth16Format not found [ WARN] [1716392174.991295189]: rtabmap_viz: Parameter Mem/StereoFromMotion not found [ WARN] [1716392174.991595033]: rtabmap_viz: Parameter Mem/TransferSortingByWeightId not found [ WARN] [1716392174.991893628]: rtabmap_viz: Parameter Mem/UseOdomFeatures not found [ WARN] [1716392174.992193312]: rtabmap_viz: Parameter Mem/UseOdomGravity not found [ WARN] [1716392174.992493923]: rtabmap_viz: Parameter ORB/EdgeThreshold not found [ WARN] [1716392174.992776871]: rtabmap_viz: Parameter ORB/FirstLevel not found [ WARN] [1716392174.993066858]: rtabmap_viz: Parameter ORB/Gpu not found [ WARN] [1716392174.993358286]: rtabmap_viz: Parameter ORB/NLevels not found [ WARN] [1716392174.993650033]: rtabmap_viz: Parameter ORB/PatchSize not found [ WARN] [1716392174.993944501]: rtabmap_viz: Parameter ORB/ScaleFactor not found [ WARN] [1716392174.994243416]: rtabmap_viz: Parameter ORB/ScoreType not found [ WARN] [1716392174.994554428]: rtabmap_viz: Parameter ORB/WTA_K not found [ WARN] [1716392174.994860959]: rtabmap_viz: Parameter Optimizer/Epsilon not found [ WARN] [1716392174.995217764]: rtabmap_viz: Parameter Optimizer/GravitySigma not found [ WARN] [1716392174.995536647]: rtabmap_viz: Parameter Optimizer/Iterations not found [ WARN] [1716392174.995865675]: rtabmap_viz: Parameter Optimizer/LandmarksIgnored not found [ WARN] [1716392174.996257456]: rtabmap_viz: Parameter Optimizer/PriorsIgnored not found [ WARN] [1716392174.996630164]: rtabmap_viz: Parameter Optimizer/Robust not found [ WARN] [1716392174.996956344]: rtabmap_viz: Parameter Optimizer/Strategy not found [ WARN] [1716392174.997267804]: rtabmap_viz: Parameter Optimizer/VarianceIgnored not found [ WARN] [1716392174.997576384]: rtabmap_viz: Parameter PyDescriptor/Dim not found [ WARN] [1716392174.997880291]: rtabmap_viz: Parameter PyDescriptor/Path not found [ WARN] [1716392174.998188167]: rtabmap_viz: Parameter PyDetector/Cuda not found [ WARN] [1716392174.998502634]: rtabmap_viz: Parameter PyDetector/Path not found [ WARN] [1716392174.998853167]: rtabmap_viz: Parameter PyMatcher/Cuda not found [ WARN] [1716392174.999157106]: rtabmap_viz: Parameter PyMatcher/Iterations not found [ WARN] [1716392174.999473078]: rtabmap_viz: Parameter PyMatcher/Model not found [ WARN] [1716392174.999769241]: rtabmap_viz: Parameter PyMatcher/Path not found [ WARN] [1716392175.000071101]: rtabmap_viz: Parameter PyMatcher/Threshold not found [ WARN] [1716392175.000407617]: rtabmap_viz: Parameter RGBD/AngularSpeedUpdate not found [ WARN] [1716392175.000712325]: rtabmap_viz: Parameter RGBD/AngularUpdate not found [ WARN] [1716392175.002289431]: rtabmap_viz: Parameter RGBD/Enabled not found [ WARN] [1716392175.002600059]: rtabmap_viz: Parameter RGBD/ForceOdom3DoF not found [ WARN] [1716392175.002879934]: rtabmap_viz: Parameter RGBD/GoalReachedRadius not found [ WARN] [1716392175.003155489]: rtabmap_viz: Parameter RGBD/GoalsSavedInUserData not found [ WARN] [1716392175.003456293]: rtabmap_viz: Parameter RGBD/InvertedReg not found [ WARN] [1716392175.003771369]: rtabmap_viz: Parameter RGBD/LinearSpeedUpdate not found [ WARN] [1716392175.004057196]: rtabmap_viz: Parameter RGBD/LinearUpdate not found [ WARN] [1716392175.004372400]: rtabmap_viz: Parameter RGBD/LocalBundleOnLoopClosure not found [ WARN] [1716392175.004657235]: rtabmap_viz: Parameter RGBD/LocalImmunizationRatio not found [ WARN] [1716392175.004937014]: rtabmap_viz: Parameter RGBD/LocalRadius not found [ WARN] [1716392175.005230650]: rtabmap_viz: Parameter RGBD/LocalizationPriorError not found [ WARN] [1716392175.005538046]: rtabmap_viz: Parameter RGBD/LocalizationSmoothing not found [ WARN] [1716392175.005840481]: rtabmap_viz: Parameter RGBD/LoopClosureIdentityGuess not found [ WARN] [1716392175.006123429]: rtabmap_viz: Parameter RGBD/LoopClosureReextractFeatures not found [ WARN] [1716392175.006400840]: rtabmap_viz: Parameter RGBD/LoopCovLimited not found [ WARN] [1716392175.006690699]: rtabmap_viz: Parameter RGBD/MarkerDetection not found [ WARN] [1716392175.006965454]: rtabmap_viz: Parameter RGBD/MaxLocalRetrieved not found [ WARN] [1716392175.007243762]: rtabmap_viz: Parameter RGBD/MaxLoopClosureDistance not found [ WARN] [1716392175.007553365]: rtabmap_viz: Parameter RGBD/MaxOdomCacheSize not found [ WARN] [1716392175.007832697]: rtabmap_viz: Parameter RGBD/NeighborLinkRefining not found [ WARN] [1716392175.008164605]: rtabmap_viz: Parameter RGBD/NewMapOdomChangeDistance not found [ WARN] [1716392175.008500865]: rtabmap_viz: Parameter RGBD/OptimizeFromGraphEnd not found [ WARN] [1716392175.008829828]: rtabmap_viz: Parameter RGBD/OptimizeMaxError not found [ WARN] [1716392175.009157288]: rtabmap_viz: Parameter RGBD/PlanAngularVelocity not found [ WARN] [1716392175.009483948]: rtabmap_viz: Parameter RGBD/PlanLinearVelocity not found [ WARN] [1716392175.009807696]: rtabmap_viz: Parameter RGBD/PlanStuckIterations not found [ WARN] [1716392175.010129108]: rtabmap_viz: Parameter RGBD/ProximityAngle not found [ WARN] [1716392175.010476984]: rtabmap_viz: Parameter RGBD/ProximityBySpace not found [ WARN] [1716392175.010797884]: rtabmap_viz: Parameter RGBD/ProximityByTime not found [ WARN] [1716392175.011124864]: rtabmap_viz: Parameter RGBD/ProximityGlobalScanMap not found [ WARN] [1716392175.011450115]: rtabmap_viz: Parameter RGBD/ProximityMaxGraphDepth not found [ WARN] [1716392175.011784071]: rtabmap_viz: Parameter RGBD/ProximityMaxPaths not found [ WARN] [1716392175.012108715]: rtabmap_viz: Parameter RGBD/ProximityMergedScanCovFactor not found [ WARN] [1716392175.012430127]: rtabmap_viz: Parameter RGBD/ProximityOdomGuess not found [ WARN] [1716392175.012780275]: rtabmap_viz: Parameter RGBD/ProximityPathFilteringRadius not found [ WARN] [1716392175.013098487]: rtabmap_viz: Parameter RGBD/ProximityPathMaxNeighbors not found [ WARN] [1716392175.013422139]: rtabmap_viz: Parameter RGBD/ProximityPathRawPosesUsed not found [ WARN] [1716392175.013750847]: rtabmap_viz: Parameter RGBD/ScanMatchingIdsSavedInLinks not found [ WARN] [1716392175.014076770]: rtabmap_viz: Parameter RGBD/StartAtOrigin not found [ WARN] [1716392175.014391110]: rtabmap_viz: Parameter Reg/Force3DoF not found [ WARN] [1716392175.014746538]: rtabmap_viz: Parameter Reg/RepeatOnce not found [ WARN] [1716392175.015074894]: rtabmap_viz: Parameter Reg/Strategy not found [ WARN] [1716392175.015416690]: rtabmap_viz: Parameter Rtabmap/ComputeRMSE not found [ WARN] [1716392175.015737462]: rtabmap_viz: Parameter Rtabmap/CreateIntermediateNodes not found [ WARN] [1716392175.016058170]: rtabmap_viz: Parameter Rtabmap/DetectionRate not found [ WARN] [1716392175.016398686]: rtabmap_viz: Parameter Rtabmap/ImageBufferSize not found [ WARN] [1716392175.016727938]: rtabmap_viz: Parameter Rtabmap/ImagesAlreadyRectified not found [ WARN] [1716392175.017056582]: rtabmap_viz: Parameter Rtabmap/LoopGPS not found [ WARN] [1716392175.017386058]: rtabmap_viz: Parameter Rtabmap/LoopRatio not found [ WARN] [1716392175.017706957]: rtabmap_viz: Parameter Rtabmap/LoopThr not found [ WARN] [1716392175.018025841]: rtabmap_viz: Parameter Rtabmap/MaxRepublished not found [ WARN] [1716392175.018345269]: rtabmap_viz: Parameter Rtabmap/MaxRetrieved not found [ WARN] [1716392175.018685529]: rtabmap_viz: Parameter Rtabmap/MemoryThr not found [ WARN] [1716392175.019008157]: rtabmap_viz: Parameter Rtabmap/PublishLastSignature not found [ WARN] [1716392175.019330945]: rtabmap_viz: Parameter Rtabmap/PublishLikelihood not found [ WARN] [1716392175.019648964]: rtabmap_viz: Parameter Rtabmap/PublishPdf not found [ WARN] [1716392175.019969064]: rtabmap_viz: Parameter Rtabmap/PublishRAMUsage not found [ WARN] [1716392175.020301964]: rtabmap_viz: Parameter Rtabmap/PublishStats not found [ WARN] [1716392175.020611600]: rtabmap_viz: Parameter Rtabmap/RectifyOnlyFeatures not found [ WARN] [1716392175.020913587]: rtabmap_viz: Parameter Rtabmap/SaveWMState not found [ WARN] [1716392175.021218263]: rtabmap_viz: Parameter Rtabmap/StartNewMapOnGoodSignature not found [ WARN] [1716392175.021511898]: rtabmap_viz: Parameter Rtabmap/StartNewMapOnLoopClosure not found [ WARN] [1716392175.021809726]: rtabmap_viz: Parameter Rtabmap/StatisticLogged not found [ WARN] [1716392175.022103777]: rtabmap_viz: Parameter Rtabmap/StatisticLoggedHeaders not found [ WARN] [1716392175.022422949]: rtabmap_viz: Parameter Rtabmap/StatisticLogsBufferedInRAM not found [ WARN] [1716392175.024568862]: rtabmap_viz: Parameter Rtabmap/VirtualPlaceLikelihoodRatio not found [ WARN] [1716392175.025922318]: rtabmap_viz: Parameter SIFT/ContrastThreshold not found [ WARN] [1716392175.026257458]: rtabmap_viz: Parameter SIFT/EdgeThreshold not found [ WARN] [1716392175.026576854]: rtabmap_viz: Parameter SIFT/NFeatures not found [ WARN] [1716392175.026876986]: rtabmap_viz: Parameter SIFT/NOctaveLayers not found [ WARN] [1716392175.027159773]: rtabmap_viz: Parameter SIFT/RootSIFT not found [ WARN] [1716392175.027440960]: rtabmap_viz: Parameter SIFT/Sigma not found [ WARN] [1716392175.027714884]: rtabmap_viz: Parameter SURF/Extended not found [ WARN] [1716392175.027999559]: rtabmap_viz: Parameter SURF/GpuKeypointsRatio not found [ WARN] [1716392175.028280586]: rtabmap_viz: Parameter SURF/GpuVersion not found [ WARN] [1716392175.028553454]: rtabmap_viz: Parameter SURF/HessianThreshold not found [ WARN] [1716392175.028825649]: rtabmap_viz: Parameter SURF/OctaveLayers not found [ WARN] [1716392175.029138036]: rtabmap_viz: Parameter SURF/Octaves not found [ WARN] [1716392175.029445560]: rtabmap_viz: Parameter SURF/Upright not found [ WARN] [1716392175.029744220]: rtabmap_viz: Parameter Stereo/DenseStrategy not found [ WARN] [1716392175.030051071]: rtabmap_viz: Parameter Stereo/Eps not found [ WARN] [1716392175.030384355]: rtabmap_viz: Parameter Stereo/Iterations not found [ WARN] [1716392175.031269358]: rtabmap_viz: Parameter Stereo/MaxLevel not found [ WARN] [1716392175.031570193]: rtabmap_viz: Parameter Stereo/MinDisparity not found [ WARN] [1716392175.031869365]: rtabmap_viz: Parameter Stereo/OpticalFlow not found [ WARN] [1716392175.032167000]: rtabmap_viz: Parameter Stereo/SSD not found [ WARN] [1716392175.032464092]: rtabmap_viz: Parameter Stereo/WinHeight not found [ WARN] [1716392175.032766527]: rtabmap_viz: Parameter Stereo/WinWidth not found [ WARN] [1716392175.033064995]: rtabmap_viz: Parameter StereoBM/BlockSize not found [ WARN] [1716392175.033368742]: rtabmap_viz: Parameter StereoBM/Disp12MaxDiff not found [ WARN] [1716392175.033659434]: rtabmap_viz: Parameter StereoBM/MinDisparity not found [ WARN] [1716392175.033952077]: rtabmap_viz: Parameter StereoBM/NumDisparities not found [ WARN] [1716392175.034261457]: rtabmap_viz: Parameter StereoBM/PreFilterCap not found [ WARN] [1716392175.034556532]: rtabmap_viz: Parameter StereoBM/PreFilterSize not found [ WARN] [1716392175.034852248]: rtabmap_viz: Parameter StereoBM/SpeckleRange not found [ WARN] [1716392175.035143931]: rtabmap_viz: Parameter StereoBM/SpeckleWindowSize not found [ WARN] [1716392175.035482751]: rtabmap_viz: Parameter StereoBM/TextureThreshold not found [ WARN] [1716392175.035777539]: rtabmap_viz: Parameter StereoBM/UniquenessRatio not found [ WARN] [1716392175.036066438]: rtabmap_viz: Parameter StereoSGBM/BlockSize not found [ WARN] [1716392175.036352298]: rtabmap_viz: Parameter StereoSGBM/Disp12MaxDiff not found [ WARN] [1716392175.036638381]: rtabmap_viz: Parameter StereoSGBM/MinDisparity not found [ WARN] [1716392175.036921552]: rtabmap_viz: Parameter StereoSGBM/Mode not found [ WARN] [1716392175.037466583]: rtabmap_viz: Parameter StereoSGBM/NumDisparities not found [ WARN] [1716392175.037828571]: rtabmap_viz: Parameter StereoSGBM/P1 not found [ WARN] [1716392175.038169535]: rtabmap_viz: Parameter StereoSGBM/P2 not found [ WARN] [1716392175.038502275]: rtabmap_viz: Parameter StereoSGBM/PreFilterCap not found [ WARN] [1716392175.038827207]: rtabmap_viz: Parameter StereoSGBM/SpeckleRange not found [ WARN] [1716392175.039146379]: rtabmap_viz: Parameter StereoSGBM/SpeckleWindowSize not found [ WARN] [1716392175.039453262]: rtabmap_viz: Parameter StereoSGBM/UniquenessRatio not found [ WARN] [1716392175.039749810]: rtabmap_viz: Parameter SuperPoint/Cuda not found [ WARN] [1716392175.040060501]: rtabmap_viz: Parameter SuperPoint/ModelPath not found [ WARN] [1716392175.040362585]: rtabmap_viz: Parameter SuperPoint/NMS not found [ WARN] [1716392175.040660125]: rtabmap_viz: Parameter SuperPoint/NMSRadius not found [ WARN] [1716392175.040964288]: rtabmap_viz: Parameter SuperPoint/Threshold not found [ WARN] [1716392175.041263460]: rtabmap_viz: Parameter VhEp/Enabled not found [ WARN] [1716392175.041557607]: rtabmap_viz: Parameter VhEp/MatchCountMin not found [ WARN] [1716392175.041859531]: rtabmap_viz: Parameter VhEp/RansacParam1 not found [ WARN] [1716392175.042156750]: rtabmap_viz: Parameter VhEp/RansacParam2 not found [ WARN] [1716392175.042472498]: rtabmap_viz: Parameter Vis/BundleAdjustment not found [ WARN] [1716392175.042775638]: rtabmap_viz: Parameter Vis/CorFlowEps not found [ WARN] [1716392175.043071737]: rtabmap_viz: Parameter Vis/CorFlowIterations not found [ WARN] [1716392175.043366141]: rtabmap_viz: Parameter Vis/CorFlowMaxLevel not found [ WARN] [1716392175.043660256]: rtabmap_viz: Parameter Vis/CorFlowWinSize not found [ WARN] [1716392175.043951491]: rtabmap_viz: Parameter Vis/CorGuessMatchToProjection not found [ WARN] [1716392175.044249095]: rtabmap_viz: Parameter Vis/CorGuessWinSize not found [ WARN] [1716392175.044540106]: rtabmap_viz: Parameter Vis/CorNNDR not found [ WARN] [1716392175.044836366]: rtabmap_viz: Parameter Vis/CorNNType not found [ WARN] [1716392175.045134993]: rtabmap_viz: Parameter Vis/CorType not found [ WARN] [1716392175.045428373]: rtabmap_viz: Parameter Vis/DepthAsMask not found [ WARN] [1716392175.045729368]: rtabmap_viz: Parameter Vis/EpipolarGeometryVar not found [ WARN] [1716392175.047109801]: rtabmap_viz: Parameter Vis/ForwardEstOnly not found [ WARN] [1716392175.047408332]: rtabmap_viz: Parameter Vis/GridCols not found [ WARN] [1716392175.047697904]: rtabmap_viz: Parameter Vis/GridRows not found [ WARN] [1716392175.047984883]: rtabmap_viz: Parameter Vis/InlierDistance not found [ WARN] [1716392175.048286903]: rtabmap_viz: Parameter Vis/Iterations not found [ WARN] [1716392175.049004319]: rtabmap_viz: Parameter Vis/MaxFeatures not found [ WARN] [1716392175.049307555]: rtabmap_viz: Parameter Vis/MeanInliersDistance not found [ WARN] [1716392175.049623398]: rtabmap_viz: Parameter Vis/MinDepth not found [ WARN] [1716392175.049935690]: rtabmap_viz: Parameter Vis/MinInliers not found [ WARN] [1716392175.050245422]: rtabmap_viz: Parameter Vis/MinInliersDistribution not found [ WARN] [1716392175.050563282]: rtabmap_viz: Parameter Vis/PnPFlags not found [ WARN] [1716392175.050863029]: rtabmap_viz: Parameter Vis/PnPMaxVariance not found [ WARN] [1716392175.051253914]: rtabmap_viz: Parameter Vis/PnPRefineIterations not found [ WARN] [1716392175.051619230]: rtabmap_viz: Parameter Vis/PnPReprojError not found [ WARN] [1716392175.051973282]: rtabmap_viz: Parameter Vis/PnPSamplingPolicy not found [ WARN] [1716392175.052331622]: rtabmap_viz: Parameter Vis/PnPSplitLinearCovComponents not found [ WARN] [1716392175.052642282]: rtabmap_viz: Parameter Vis/PnPVarianceMedianRatio not found [ WARN] [1716392175.052948750]: rtabmap_viz: Parameter Vis/RefineIterations not found [ WARN] [1716392175.053253105]: rtabmap_viz: Parameter Vis/RoiRatios not found [ WARN] [1716392175.053562581]: rtabmap_viz: Parameter Vis/SSC not found [ WARN] [1716392175.053867513]: rtabmap_viz: Parameter Vis/SubPixEps not found [ WARN] [1716392175.054171004]: rtabmap_viz: Parameter Vis/SubPixIterations not found [ WARN] [1716392175.054478016]: rtabmap_viz: Parameter Vis/SubPixWinSize not found [ WARN] [1716392175.054790020]: rtabmap_viz: Parameter g2o/Baseline not found [ WARN] [1716392175.055090567]: rtabmap_viz: Parameter g2o/Optimizer not found [ WARN] [1716392175.055387371]: rtabmap_viz: Parameter g2o/PixelVariance not found [ WARN] [1716392175.055678798]: rtabmap_viz: Parameter g2o/RobustKernelDelta not found [ WARN] [1716392175.055971633]: rtabmap_viz: Parameter g2o/Solver not found [ INFO] [1716392175.056004242]: rtabmap_viz: Parameters read = 10 [ INFO] [1716392175.257528831]: /rtabmap/rtabmap_viz: subscribe_depth = false [ INFO] [1716392175.257588736]: /rtabmap/rtabmap_viz: subscribe_rgb = false [ INFO] [1716392175.257607232]: /rtabmap/rtabmap_viz: subscribe_stereo = true [ INFO] [1716392175.257626048]: /rtabmap/rtabmap_viz: subscribe_rgbd = false (rgbd_cameras=1) [ INFO] [1716392175.257643168]: /rtabmap/rtabmap_viz: subscribe_sensor_data = false [ INFO] [1716392175.257657120]: /rtabmap/rtabmap_viz: subscribe_odom_info = true [ INFO] [1716392175.257673569]: /rtabmap/rtabmap_viz: subscribe_user_data = false [ INFO] [1716392175.257688705]: /rtabmap/rtabmap_viz: subscribe_scan = false [ INFO] [1716392175.257703745]: /rtabmap/rtabmap_viz: subscribe_scan_cloud = false [ INFO] [1716392175.257718593]: /rtabmap/rtabmap_viz: subscribe_scan_descriptor = false [ INFO] [1716392175.257733825]: /rtabmap/rtabmap_viz: queue_size = 10 [ INFO] [1716392175.257750306]: /rtabmap/rtabmap_viz: approx_sync = false [ INFO] [1716392175.257803554]: Setup stereo callback [ INFO] [1716392175.345201579]: /rtabmap/rtabmap_viz subscribed to (exact sync): /stereo_odometry \ /stereo_cam/left_img \ /stereo_cam/right_img \ /left/camera_info \ /right/camera_info \ /rtabmap/odom_info [ INFO] [1716392175.348118829]: rtabmap_viz started. [DEBUG] (2024-05-22 15:36:23.373) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.380032929]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.006788s [DEBUG] (2024-05-22 15:36:23.465) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.465709941]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000308s [DEBUG] (2024-05-22 15:36:23.563) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.563922557]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000342s [DEBUG] (2024-05-22 15:36:23.662) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.663250322]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000302s [DEBUG] (2024-05-22 15:36:23.762) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.762613927]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000355s [DEBUG] (2024-05-22 15:36:23.862) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.862537859]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000335s [DEBUG] (2024-05-22 15:36:23.961) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392183.962090522]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000335s [DEBUG] (2024-05-22 15:36:24.061) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.061993494]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000300s [DEBUG] (2024-05-22 15:36:24.164) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.164968917]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000322s [DEBUG] (2024-05-22 15:36:24.262) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.262903802]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000304s [DEBUG] (2024-05-22 15:36:24.366) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.367067303]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000323s [DEBUG] (2024-05-22 15:36:24.472) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.472899753]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000365s [DEBUG] (2024-05-22 15:36:24.564) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.565194186]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000331s [DEBUG] (2024-05-22 15:36:24.667) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.667460802]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000314s [DEBUG] (2024-05-22 15:36:24.768) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.768549355]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000315s [DEBUG] (2024-05-22 15:36:24.863) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.864376247]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000449s [DEBUG] (2024-05-22 15:36:24.964) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392184.965228637]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000306s [DEBUG] (2024-05-22 15:36:25.065) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392185.066007299]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000448s [DEBUG] (2024-05-22 15:36:25.165) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392185.165457721]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000337s [DEBUG] (2024-05-22 15:36:25.266) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392185.266792582]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000336s [DEBUG] (2024-05-22 15:36:25.365) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392185.365768310]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000318s [DEBUG] (2024-05-22 15:36:25.465) Odometry.cpp:342::process() Processing image data 2048x1080: rgbd models=0, stereo models=1 [ INFO] [1716392185.466239352]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.000336s ^C[rtabmap/rtabmap_viz-10] killing on exit [rtabmap/rtabmap-9] killing on exit [rtabmap/stereo_odometry-8] killing on exit [rtabmap/link2_broadcaster-7] killing on exit [rtabmap/link1_broadcaster-6] killing on exit [yaml_to_camera_info_right-5] killing on exit [ INFO] [1716392185.544508980]: rtabmapviz: ctrl-c catched! Exiting Qt app... [yaml_to_camera_info_left-4] killing on exit [republish_right-3] killing on exit [republish_left-2] killing on exit [ INFO] (2024-05-22 15:36:25.909) PythonInterface.cpp:25::~PythonInterface() Finalize python interpreter [rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done |
|
|
Here I provide the sample bag and config files with extrinsic and intrinsic.
pohang.yaml pohang_stereo_imu_config.yaml Sample bag link https://www.transfernow.net/dl/20240523bEtH9i1I I have integrated the VINS-Fusion and OpenVINS along with Orb-SLAM3 in the same docker file and all seems to have the same issue. Docker file : Dockerfile.Dockerfile Orb-slam3 patch: orbslam3_rtabmap_fix.patch Vins-Fusion patch: vins-fusion.patch Launch files : pohang_orb.launch pohang_ov.launch pohang_vins.launch Please let me know if I am missing something or any other files you may need. Thanks for your efforts!! |
|
Administrator
|
Hi,
The bag you shared has missing data. For example, the camera info topics are missing, /tf and /tf_static are missing (not sure if they should be there).
rosbag info pohang00_01_sample.bag
path: pohang00_01_sample.bag
version: 2.0
duration: 1:39s (99s)
start: Jul 01 2021 00:25:49.16 (1625124349.16)
end: Jul 01 2021 00:27:29.13 (1625124449.13)
size: 4.9 GB
messages: 23356
compression: none [2001/2001 chunks]
types: dataset_converter/PohangGPS [190edd4966029545b11fdf62ed1c900f]
geometry_msgs/PoseStamped [d3812c3cbc69362b77dc0b19b345f8f5]
sensor_msgs/CompressedImage [8f7a12909da2c9d3332d540a0977563f]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
sensor_msgs/NavSatFix [2d3a8cd499b9b4a0249fb98fd05cfa48]
topics: /gps/gps_nav 480 msgs : sensor_msgs/NavSatFix
/gps/gps_nav_raw 480 msgs : dataset_converter/PohangGPS
/gx5/baseline 397 msgs : geometry_msgs/PoseStamped
/gx5/imu/data 10001 msgs : sensor_msgs/Imu
/gx5/imu_calib/data 9998 msgs : sensor_msgs/Imu
/stereo_cam/left_img/compressed 1000 msgs : sensor_msgs/CompressedImage
/stereo_cam/right_img/compressed 1000 msgs : sensor_msgs/CompressedImage
The stereo images are not "stereo rectified", so without calibration file, I cannot rectify them if these are the raw images. Here is an overlay of the two images (note how they are not aligned vertically):  Left and right separately:   I checked to download the first sequence of the dataset, but this command fails silently (with --debug, it says "cannot connect", maybe an aws account is really required to download): aws s3 sync --no-sign-request s3://pohang-canal-dataset/pohang00 . Hopefully, I've found the dataset's Samples page. To rectify the images and create the calibration yaml files, I created that script:
#!/usr/bin/python3
import cv2
import numpy as np
from numpy.linalg import inv
from scipy.spatial.transform import Rotation
import json
import os
from pathlib import Path
def save_calibration(yaml_filename, img_size, K, D, R, P):
cv_file = cv2.FileStorage(yaml_filename, cv2.FILE_STORAGE_WRITE)
cv_file.write("image_width", img_size[0])
cv_file.write("image_height", img_size[1])
cv_file.write("camera_matrix", K)
cv_file.write("distortion_model", "plumb_bob")
cv_file.write("distortion_coefficients", D)
cv_file.write("rectification_matrix", R)
cv_file.write("projection_matrix",P)
cv_file.release()
if __name__ == "__main__":
with open('calibration/intrinsics.json') as f:
intrinsics = json.load(f)
left = intrinsics["stereo_left"]
right = intrinsics["stereo_right"]
Kl = np.matrix([
[left["focal_length"], 0, left["cc_x"]],
[0, left["focal_length"], left["cc_y"]],
[0, 0, 1] ])
Dl = np.matrix(left["distortion_coefficients"])
Kr = np.matrix([
[right["focal_length"], 0, right["cc_x"]],
[0, right["focal_length"], right["cc_y"]],
[0, 0, 1] ])
Dr = np.matrix(right["distortion_coefficients"])
img_size = (right["image_width"],right["image_height"])
with open('calibration/extrinsics.json') as f:
extrinsics = json.load(f)
left = extrinsics["stereo_left"]
right = extrinsics["stereo_right"]
Tl = np.hstack((Rotation.from_quat(left["quaternion"]).as_matrix(), np.transpose(np.matrix(left["translation"]))))
Tr = np.hstack((Rotation.from_quat(right["quaternion"]).as_matrix(), np.transpose(np.matrix(right["translation"]))))
Tl = np.vstack((Tl, [0,0,0,1]))
Tr = np.vstack((Tr, [0,0,0,1]))
RT = np.dot(inv(Tr), Tl)
R = RT[0:3, 0:3]
T = RT[0:3, 3]
R1, R2, P1, P2, Q, validRoi1, validRoi2 = cv2.stereoRectify(Kl, Dl, Kr, Dr, img_size, R, T)
save_calibration("stereo/calib_left.yaml", img_size, Kl, Dl, R1, P1)
save_calibration("stereo/calib_right.yaml", img_size, Kr, Dr, R2, P2)
xmap1, ymap1 = cv2.initUndistortRectifyMap(Kl, Dl, R1, P1, img_size, cv2.CV_32FC1)
xmap2, ymap2 = cv2.initUndistortRectifyMap(Kr, Dr, R2, P2, img_size, cv2.CV_32FC1)
directory = "stereo/left_images"
output_directory = "stereo/rectified_left_images"
Path(output_directory).mkdir(parents=True, exist_ok=True)
for filename in os.listdir(directory):
f = os.path.join(directory, filename)
img = cv2.imread(f)
img_rectified = cv2.remap(img, xmap1, ymap1, cv2.INTER_LINEAR)
out = os.path.join(output_directory, filename)
cv2.imwrite(out, img_rectified)
directory = "stereo/right_images"
output_directory = "stereo/rectified_right_images"
Path(output_directory).mkdir(parents=True, exist_ok=True)
for filename in os.listdir(directory):
f = os.path.join(directory, filename)
img = cv2.imread(f)
img_rectified = cv2.remap(img, xmap2, ymap2, cv2.INTER_LINEAR)
out = os.path.join(output_directory, filename)
cv2.imwrite(out, img_rectified)
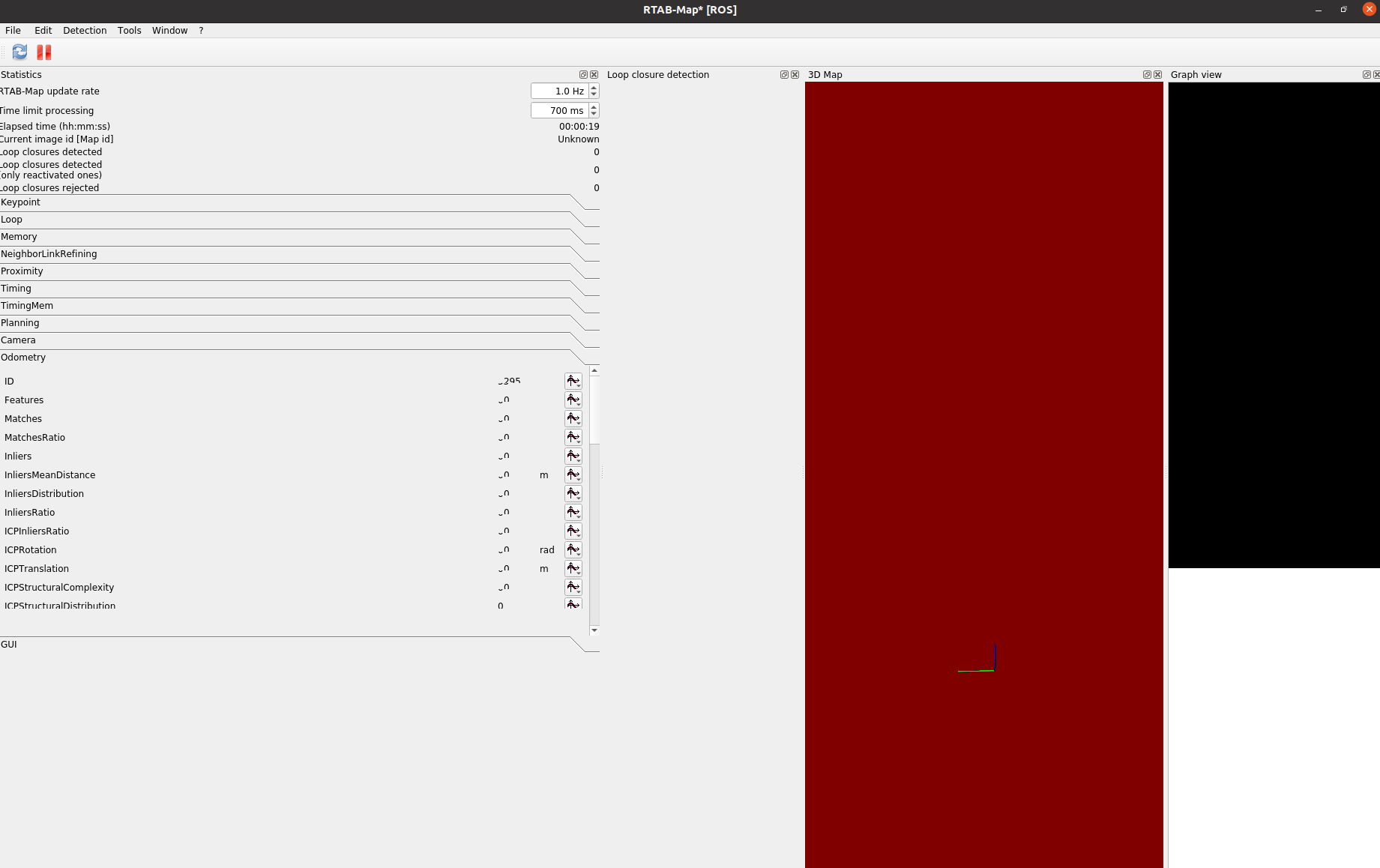
First test with rtabmap standalone using stereo images as input (default parameters): 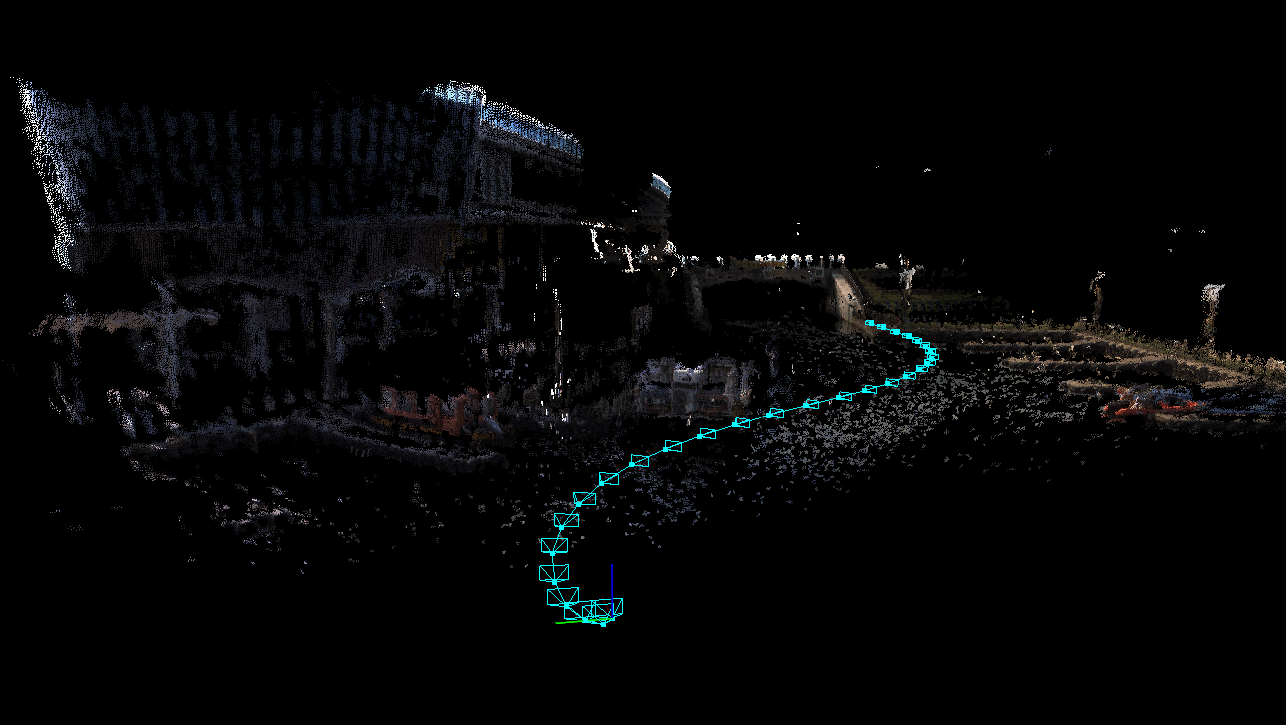 I tried your image with ORB_SLAM3, but I got this error after ORB_SAM3 initialized:
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: Stereo
Loading settings from /root/Documents/RTAB-Map/rtabmap_orbslam.yaml
-Loaded camera 1
-Loaded camera 2
Camera.newHeight optional parameter does not exist...
Camera.newWidth optional parameter does not exist...
-Loaded image info
-Loaded ORB settings
Viewer.imageViewScale optional parameter does not exist...
-Loaded viewer settings
System.LoadAtlasFromFile optional parameter does not exist...
System.SaveAtlasToFile optional parameter does not exist...
-Loaded Atlas settings
System.thFarPoints optional parameter does not exist...
-Loaded misc parameters
-Computed rectification maps
----------------------------------
SLAM settings:
-Camera 1 parameters (Pinhole): [ 1813.38 1813.38 1128.04 518.378 ]
-Camera 1 distortion parameters: [ 0 0 0 0 0 ]
-Camera 2 parameters (Pinhole: [ 1813.38 1813.38 1128.04 518.378 ]
-Camera 1 distortion parameters: [ 0 0 0 0 0 ]
-Original image size: [ 2048 , 1080 ]
-Current image size: [ 2048 , 1080 ]
-Camera 1 parameters after rectification: [ 1813.38 1813.38 1128.04 518.378 ]
-Sequence FPS: 10
-Stereo baseline: 0.843787
-Stereo depth threshold : 40
-Features per image: 1000
-ORB scale factor: 2
-ORB number of scales: 3
-Initial FAST threshold: 20
-Min FAST threshold: 7
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
There are 1 cameras in the atlas
Camera 0 is pinhole
terminate called after throwing an instance of 'cv::Exception'
what(): OpenCV(4.2.0) ../modules/imgproc/src/color.simd_helpers.hpp:92: error: (-2:Unspecified error) in function 'cv::impl::{anonymous}::CvtHelper<VScn, VDcn, VDepth, sizePolicy>::CvtHelper(cv::InputArray, cv::OutputArray, int) [with VScn = cv::impl::{anonymous}::Set<3, 4>; VDcn = cv::impl::{anonymous}::Set<1>; VDepth = cv::impl::{anonymous}::Set<0, 2, 5>; cv::impl::{anonymous}::SizePolicy sizePolicy = cv::impl::<unnamed>::NONE; cv::InputArray = const cv::_InputArray&; cv::OutputArray = const cv::_OutputArray&]'
> Invalid number of channels in input image:
> 'VScn::contains(scn)'
> where
> 'scn' is 1
Aborted (core dumped)
The issue was because the left image was fed with 3 channels (RGB) to ORB_SLAM3, which requires gray-scale image instead. It has been fixed in this commit. Here is a result with ORB_SLAM3:
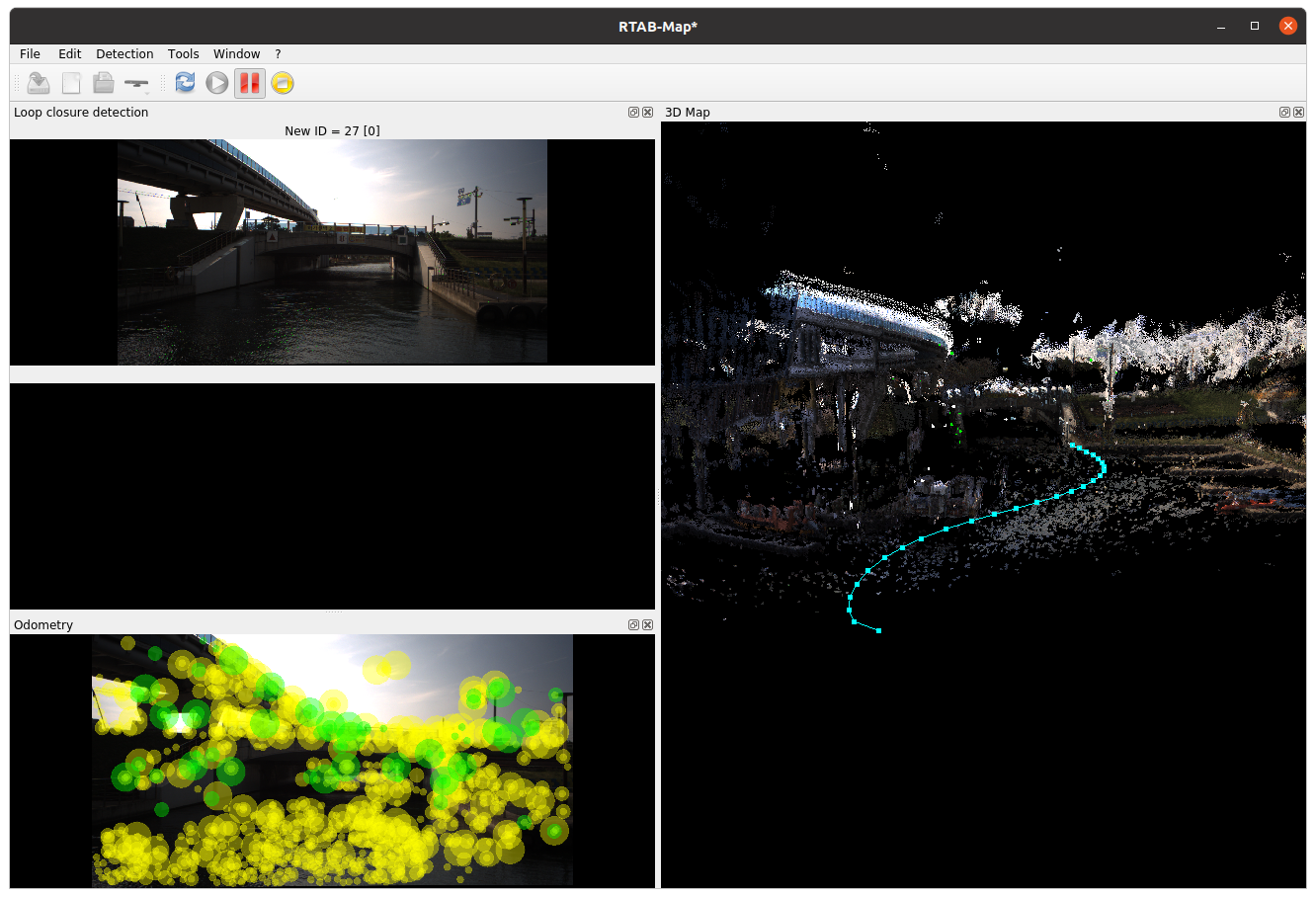 To launch rtabmap standalone, I launched your docker like this: XAUTH=/tmp/.docker.xauth touch $XAUTH xauth nlist $DISPLAY | sed -e 's/^..../ffff/' | xauth -f $XAUTH nmerge - docker run -it --rm \ --privileged \ --env="DISPLAY=$DISPLAY" \ --env="QT_X11_NO_MITSHM=1" \ --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \ --env="XAUTHORITY=$XAUTH" \ --volume="$XAUTH:$XAUTH" \ -e NVIDIA_VISIBLE_DEVICES=all \ -e NVIDIA_DRIVER_CAPABILITIES=all \ --runtime=nvidia \ --network host \ -v ~/Downloads/pohang00_pier:/rtabmap/pohang00_pier \ rtabmap_orb_slam3 source /rtabmap/catkin_ws/devel/setup.bash rtabmapParameters to set (note that for timestamp.txt to be compatible, remove the second column in that file): 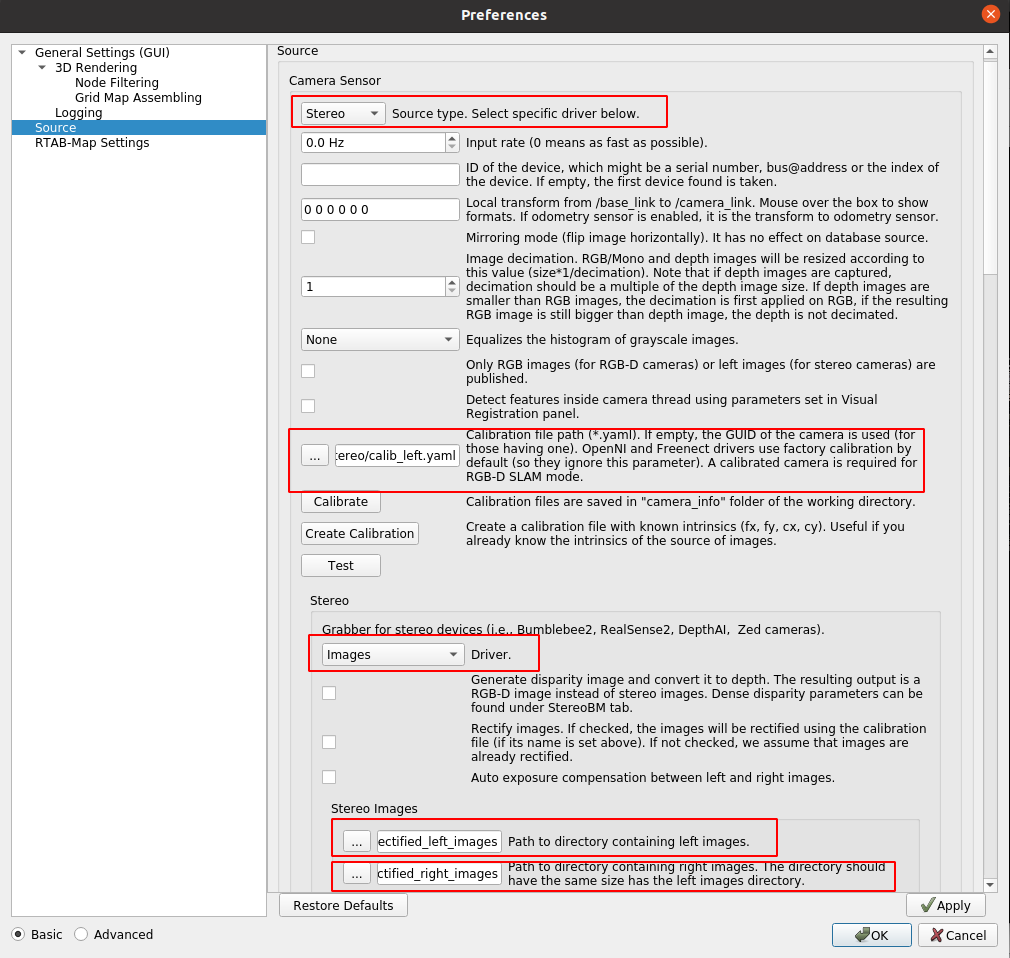 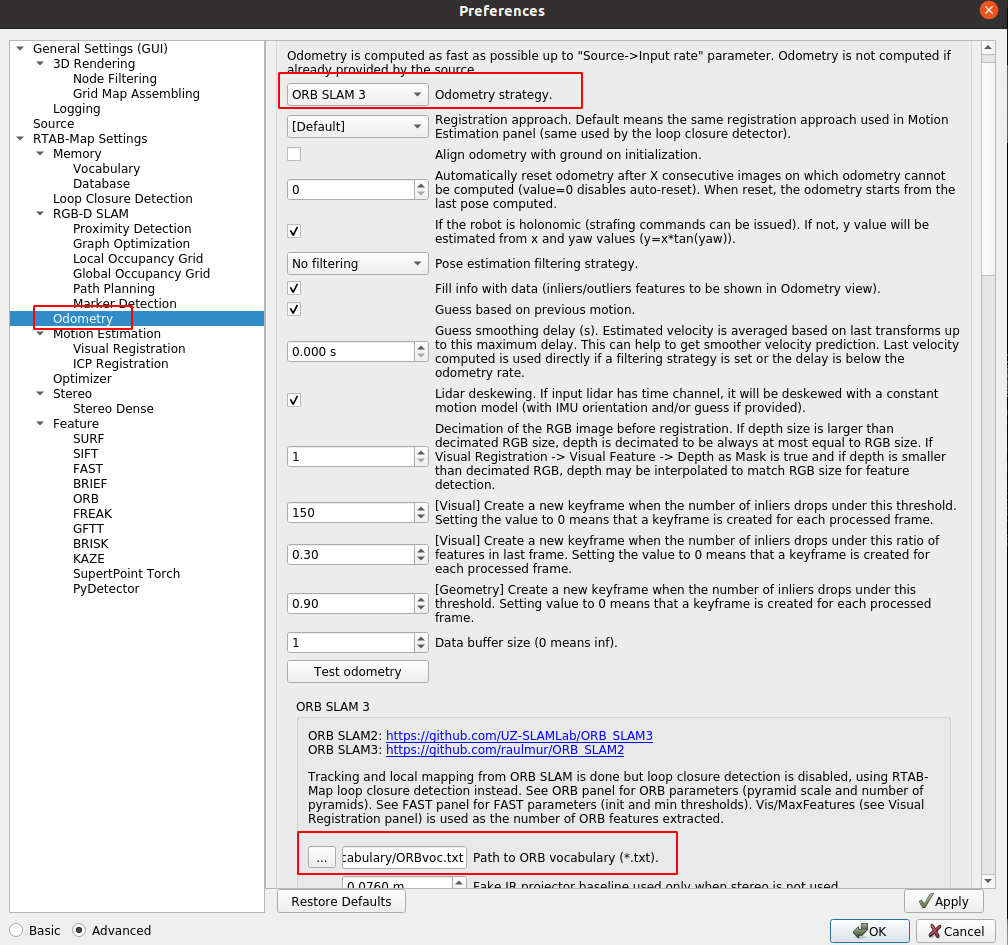 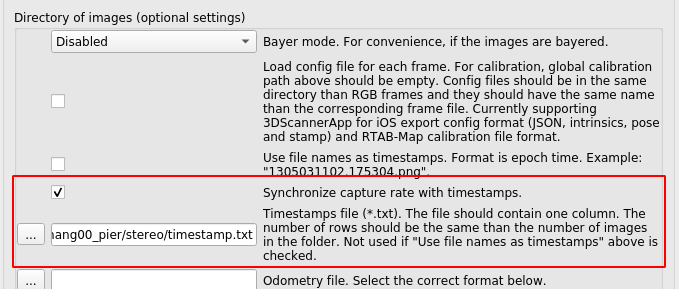 I didn't do more tests with the ros package because I don't have much more time to fix the dataset -> ros converter. If you are going to use ROS (if you want to use GPS, IMU and/or lidar), you may be able to rectify images before publishing them and also send camera_info for left and right cameras at the same time around here in their code (based on what I did in python above). cheers, Mathieu |
|
|
Hey Mathieu,
Thank you for your efforts and the new commit. I got it working with ROS. I wanted to know a bit more about Pose Covariance. ORBSLAM3 doesn't evaluate the Pose Covariance but RTABMAP integrated with ORBSLAM does output the covariance. It's seems to output a single value for Cxx Cyy and Czz. Firstly, how did you formulate the covariance evaluation and how are Cxx Cyy and Czz same? Specially variation in z cannot be same as x and y. Here is the sample of Covarince output: position: x: 7.632015705108643 y: 2.2905454635620117 z: 0.4457640051841736 orientation: x: 0.7882877155282363 y: 0.10501581808155115 z: -0.6004122970172704 w: 0.08413815478355872 covariance: [0.04523331399410964, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.04523331399410964, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.04523331399410964, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.00033940442427294335, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.00033940442427294335, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.00033940442427294335] Warm Regards Rishabh |
|
Administrator
|
Hi,
ORBSLAM doesn't output a covariance, so we use a fixed one: https://github.com/introlab/rtabmap/blob/5b810da73b579b2f1c4f3f094024d6f9f29d2a0e/corelib/src/odometry/OdometryORBSLAM3.cpp#L515-L528 Don't remember exactly why we made the change in this commit from previous values hard-coded from viso2 package to know relative to baseline of the camera (though it could make sense if larger baseline may means larger environment with features farther away). 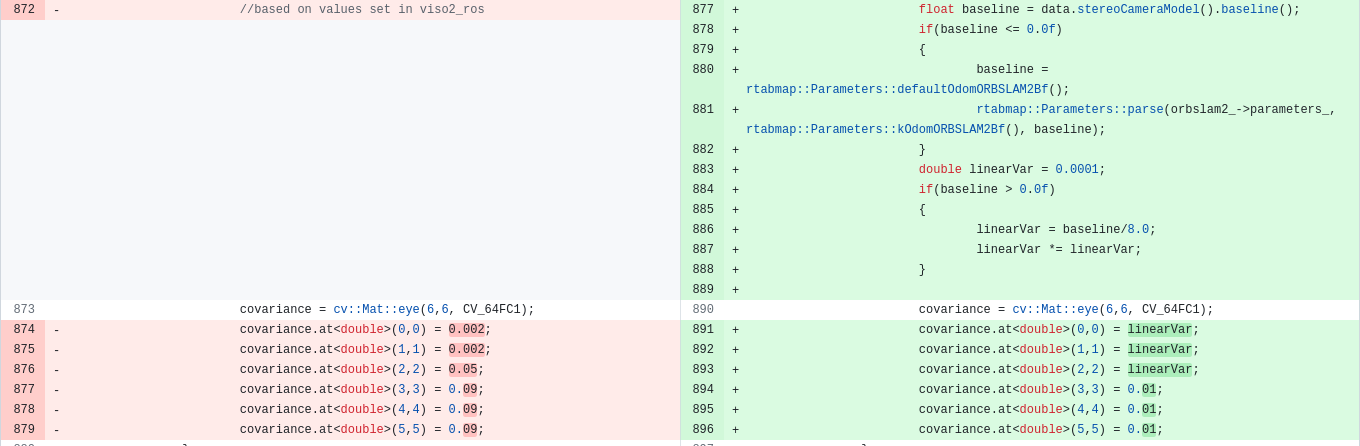 cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |