Dear people.
I do have the following:
Tbs discovery
Jetson tx2
Pixhawk mini with 3DR GPS
ZED camera.
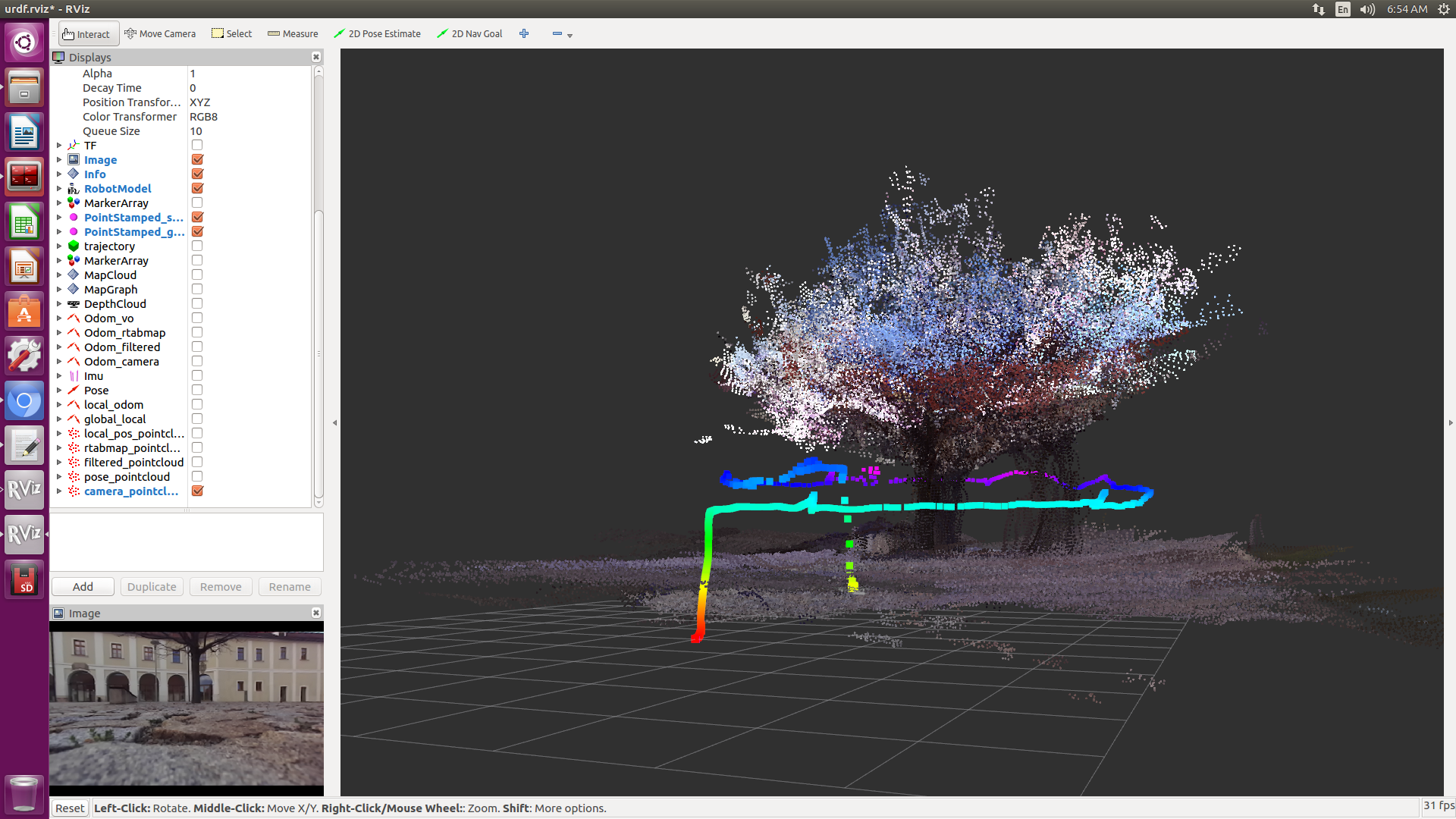
I have tried to scan a tree using rtabmap_ros. The way I did it was as follows; I was walking around the tree with the drone on my hand and making smooth movements around the tree, while scanning I stopped and moved the drone up and down.
The result is that the tree was scanned many times and shifted, I was expecting to scan a single tree, also the floor is not smooth on the surface.
The result can be seen in the picture.
I include a rosbag called tree.bag
http://www.fit.vutbr.cz/~plascencia/tree.bagand I have used to roslaunch files:
1.- Provided by Mathieu
zed_mathieu_stereo_fusion_bag_play.launchThe way I have run this roslaunch was:
$roslaunch zed_wrapper zed_mathieu_stereo_fusion_bag_play.launch sensor_fusion:=false zed_odom:=true
$rosbag play --clock tree.bag
2.- zed_stereo_rtabmap_bag_play.launchThe way I have run this roslaunch was:
roslaunch zed_wrapper zed_stereo_rtabmap_bag_play.launch
Just to mention that while running the launch files I sometimes get the following warning:
OdometryF2M.cpp:469::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=9) between -1 and 9"
The question or questions is/are:
1.- Why rtabmap scans multiple times the tree? is there any way or to tune some parameters to make rtabmap to scan the tree and the floor correctly?
2.-If I fly the drone around the tree up and down, which parameters shall I tune or add in order to get a nice scan?
Thank you in so much :)

