Hi Mathieu
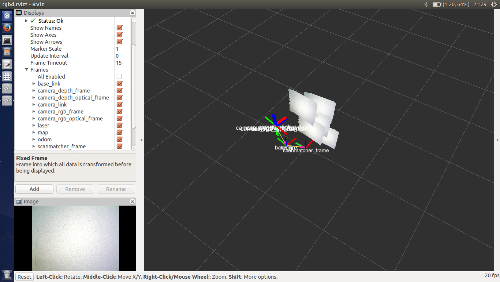
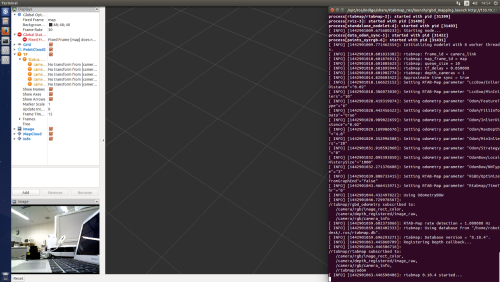
I've been trying to use rgbd_mapping.launch and a demo for kinect and laser, I don't know how to setup odometry for roomba wheels, so I've decided to use the setup mentioned in the tutorial Set Up In Your Robot 3.3 Kinect+2D laser and using hector_mapping, but there are many configurations and parameters that I don't know if I have to change, and also I think I have problems with the TF, because when rgbd_mapping.launch is working many point clouds become to appear everywhere.
This is mi launch file for devices:
<launch>
<!--Initializes all devices-->
<!--Roomba-->
<node pkg="roomba_500_series" type="roomba500_light_node" name="roomba500" output="screen"/>
<!--Laser-->
<!--node pkg="urg_node" type="urg_node" name="mapping_urg"/-->
<node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo_scan"/>
<!--param name="serial_port" value="/dev/ttyACM0"/>
</node-->
<!--Camera-->
<include file="$(find ros_cam_node)/launch/ros_cam_node.launch"/>
<!--TF-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.14 0.0 0.12 0 0 0 base_link laser 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.15 0.0 0.59 0 0 0 base_link camera_link 100"/>
<node pkg="roomba_tf" type="test_listener_tf" name="laser_tf" output="screen"/>
<node pkg="roomba_tf" type="camtest_listener_tf" name="cam_tf" output="screen"/>
<!--AMCL-->
<node pkg="amcl" type="amcl" name="amcl"/>
</launch>
And this is for 2D mapping
<launch>
<arg name="base_frame" default="base_link"/>
<arg name="odom_frame" default="base_link"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 base_link laser 100"/>
<node pkg="rviz" type="rviz" name="map_rviz"/>
</launch>How can I use this together with rtabmap and what params I have to change in the demo_hector_mapping.launch file or create a new launch file?
Also I attach the image of rviz with the point clouds.