Thanks for the information. I have some follow up questions on navigation stack.
matlabbe wrote
In that tutorial, "rtabmap" replace "map_server" and "amcl" modules.
Does that mean that I don't need a move_base launch file if I am using rtabmap.launch file?
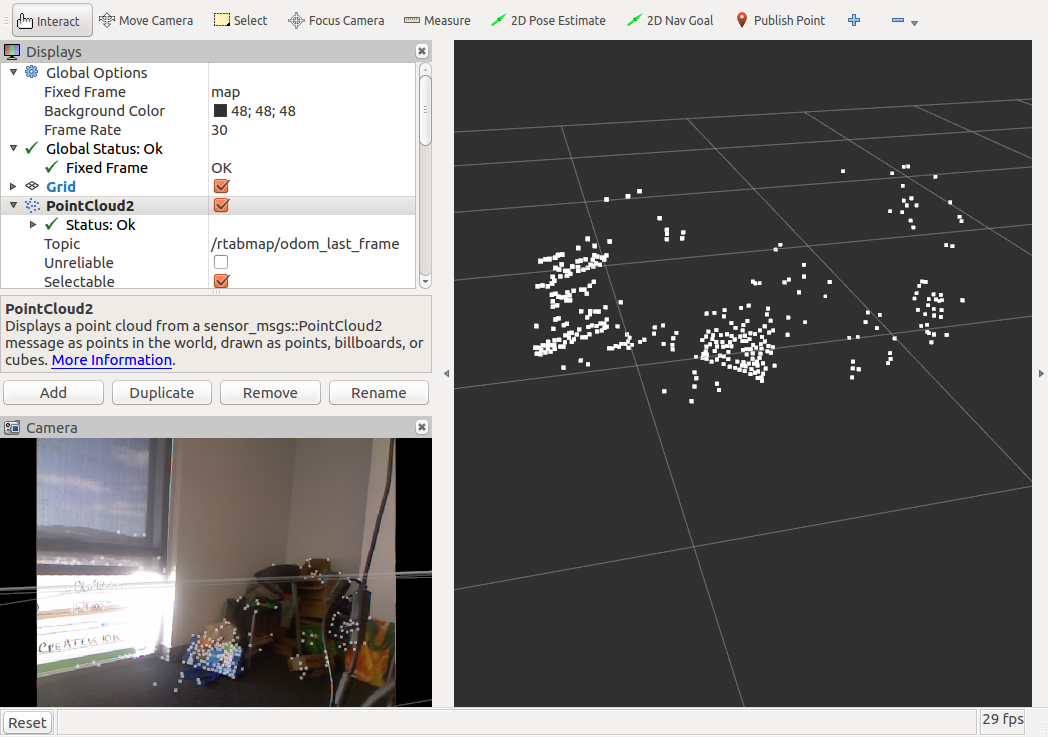
Also, for the odometry sensor, if I am only using visual odometry, do I have to explicitly call the 'rgbd_odometry' node pkg in my configuration file, or rtabmap.launch has already taken care of that?
From my understanding, all I need to launch now is just openni2(sensor), rtabmap(odometry, map_server, amcl), and a base_controller that listens to odometry messages. Please enlighten me.
Thanks for your patience.
CJ