RTABMAP not detecting Kinect


|
Hello,
I am having a problem connecting my kinect with rtabmap. I am getting the following errors and cannot find my device in the detection menu of the rtabmap window. 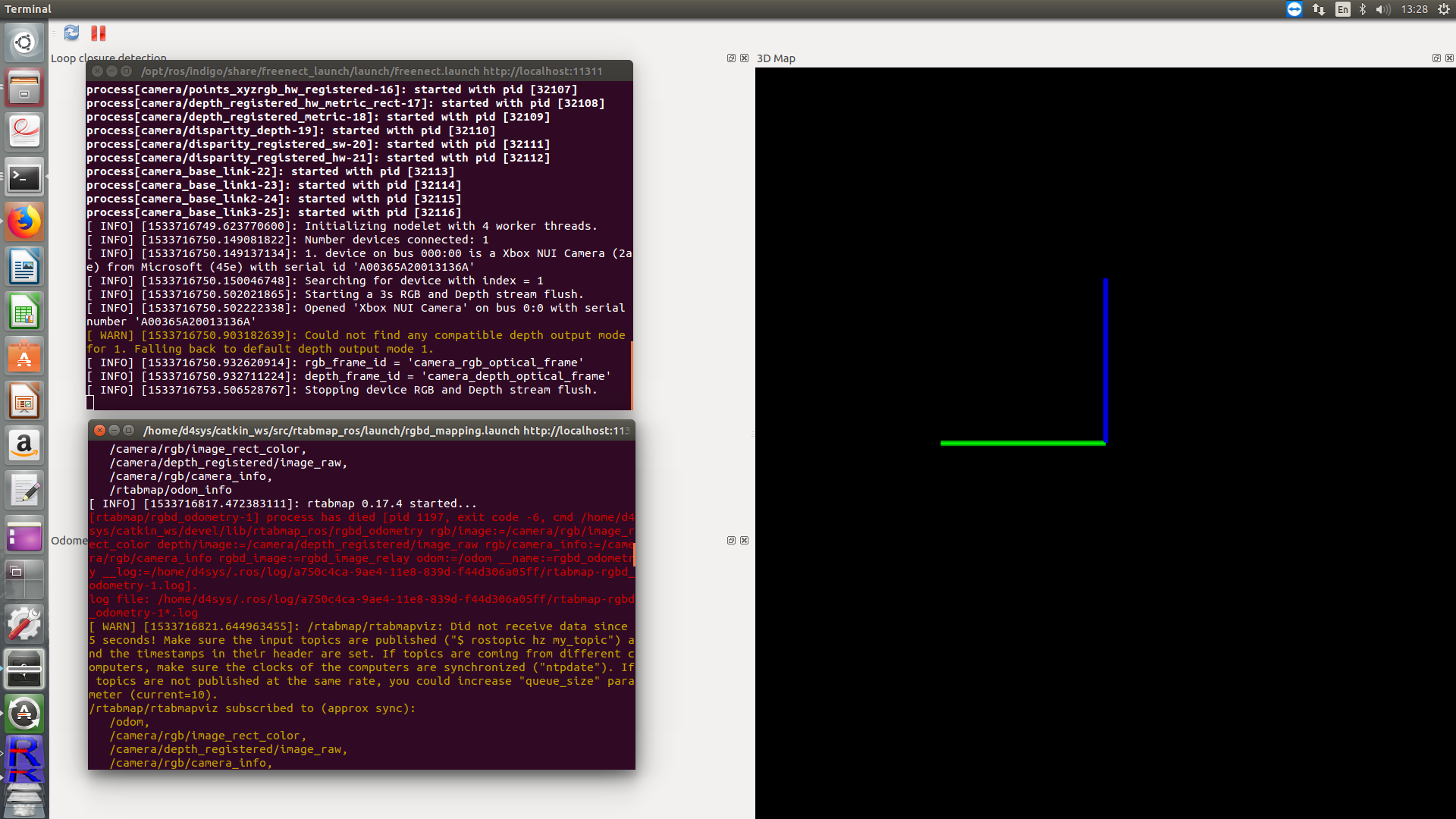 Kindly help me with this problem Regards |
|
Administrator
|
The kinect seems detected, but rgbd_odometry crashes. Just tried on indigo latest code from source and it should work. What are the dependencies? Can you show output of cmake for rtabmap build?
$ cd rtabmap/build $ cmake .. You may try to start rtabmap with gdb: $ roslaunch rtabmap_ros rgbd_mapping.launch launch_prefix:="xterm -e gdb --args" ...Then do "bt" (bascktrace) on rgbd_odometry terminal after it crashes to see more info. |
|
|
Hello,
Thank you for replying. Here is the output of cmake. CMake Deprecation Warning at CMakeLists.txt:57 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. -- PCL definitions don't contain "-march=native", make sure all libraries using Eigen are also compiled without that flag to avoid some segmentation faults (with gdb referring to some Eigen functions). -- Found OpenMP -- Found OpenCV: /usr/local/include/opencv;/usr/local/include -- Found PCL: /usr/include/pcl-1.7;/usr/local/include/eigen3;/usr/include;/usr/include/ni;/usr/include/openni2;/usr/include/vtk-5.8 -- Found ZLIB: /usr/include -- Found Freenect: /usr/include -- Found OpenNI2: /usr/include/openni2 -- Found DC1394: /usr/include/dc1394 -- Found RealSense: /opt/ros/indigo/include -- Found octomap 1.6.9: /opt/ros/indigo/include -- Found Pthreads CMake Deprecation Warning at tools/KittiDataset/CMakeLists.txt:14 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/RgbdDataset/CMakeLists.txt:14 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/EurocDataset/CMakeLists.txt:30 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Recovery/CMakeLists.txt:12 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Reprocess/CMakeLists.txt:12 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Report/CMakeLists.txt:16 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/BOWMapping/CMakeLists.txt:27 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/RGBDMapping/CMakeLists.txt:41 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/WifiMapping/CMakeLists.txt:35 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/NoEventsExample/CMakeLists.txt:35 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. -- -------------------------------------------- -- Info : -- Version : 0.17.4 -- CMAKE_INSTALL_PREFIX = /home/d4sys/catkin_ws/devel -- CMAKE_BUILD_TYPE = Release -- CMAKE_INSTALL_LIBDIR = lib -- BUILD_APP = ON -- BUILD_TOOLS = ON -- BUILD_EXAMPLES = ON -- BUILD_SHARED_LIBS = ON -- CMAKE_CXX_FLAGS = -fmessage-length=0 -Wno-deprecated -fopenmp -std=c++11 -- PCL_DEFINITIONS = -DEIGEN_USE_NEW_STDVECTOR;-DEIGEN_YES_I_KNOW_SPARSE_MODULE_IS_NOT_STABLE_YET;-DFLANN_STATIC;-Dqh_QHpointer -- With OpenCV 3 xfeatures2d module (SIFT/SURF/BRIEF/FREAK) = YES (License: Non commercial) -- With Freenect = YES (License: Apache v2 and/or GPLv2) -- With OpenNI2 = YES (License: Apache v2) -- With Freenect2 = NO (libfreenect2 not found) -- With Kinect for Windows 2 = NO (Kinect for Windows 2 SDK not found) -- With dc1394 = YES (License: LGPL) -- With FlyCapture2/Triclops = NO (Point Grey SDK not found) -- With TORO = YES (License: Creative Commons [Attribution-NonCommercial-ShareAlike]) -- With g2o = NO (WITH_G2O=OFF) -- With GTSAM = NO (GTSAM not found) -- With VERTIGO = NO (GTSAM or g2o required) -- With cvsba = NO (cvsba not found) -- With libpointmatcher = NO (libpointmatcher not found) -- With loam_velodyne = NO (loam_velodyne not found) -- With ZED = NO (ZED sdk not found) -- With RealSense = YES (License: Apache-2) -- With RealSenseSlam = NO (WITH_REALSENSE_SLAM=OFF) -- With RealSense2 = NO (librealsense2 not found) -- With OCTOMAP = YES (License: BSD) -- With CPUTSDF = NO (CPUTSDF not found) -- With OpenChisel = NO (open_chisel not found) -- With libfovis = NO (libfovis not found) -- With libviso2 = NO (libviso2 not found) -- With dvo_core = NO (dvo_core not found) -- With okvis = NO (okvis not found) -- With msckf_vio = NO (WITH_MSCKF_VIO=OFF) -- With ORB_SLAM2 = NO (ORB_SLAM2 not found, make sure environment variable ORB_SLAM2_ROOT_DIR is set) -- With Qt4 = YES (License: Open Source or Commercial) -- -------------------------------------------- -- Configuring done -- Generating done -- Build files have been written to: /home/d4sys/rtabmap/build And when I run the command it just shows this  |
|
|
Hello,
After a bit of searching i found a link which I think is also answered by you. I tried running the command but it gave the following error. 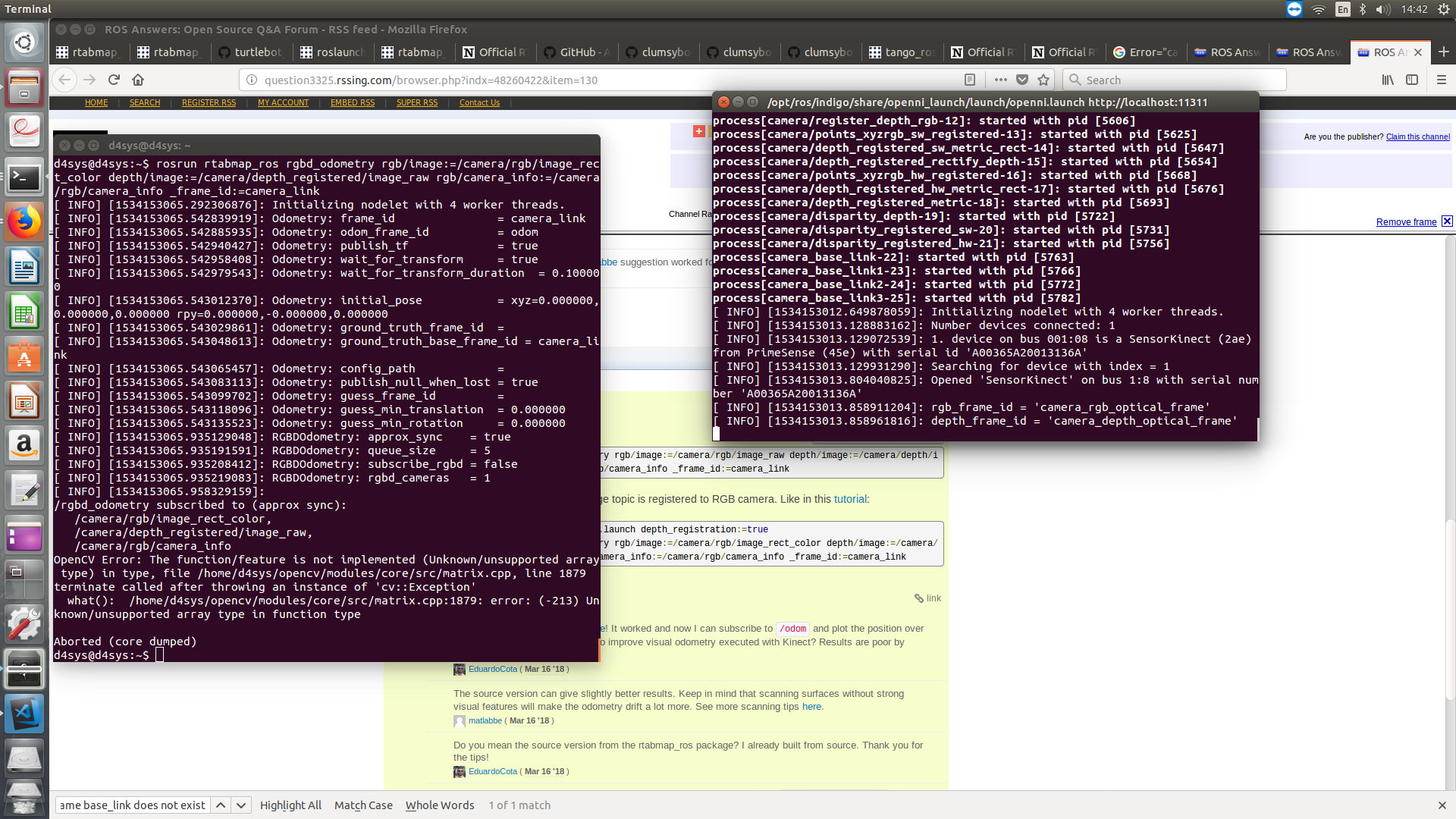 This error is what I got before as well right before the rgbd_odometry crash statement. When I change the frame_id form camera_link to base_link it doesn't give the error but continuously spits out warnings.
[ WARN] [1534153055.001212118]: odometry: Could not get transform from base_link to camera_rgb_optical_frame (stamp=1534153054.866910) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: target_frame base_link does not exist.. canTransform returned after 0.100552 timeout was 0.1."
I was trying to run the kinect with visual_odometry as shown in section 2.5 of Setup On Your Robot Regards |
|
Administrator
|
Hi,
It seems you have installed OpenCV3 on a computer with ROS Indigo: -- With OpenCV 3 xfeatures2d module (SIFT/SURF/BRIEF/FREAK) = YES (License: Non commercial)rtabmap_ros is linked on cv_bridge, which is built against OpenCV2. While being also linked to rtabmap which is built against OpenCV3, there are two opencv versions loaded at the same time when launching rtabmap_ros nodes. This is likely causing crashes when opencv functions are used. If you want to use OpenCV3, you should remove ros-indigo-cv-bridge and build cv_bridge from source. This will uninstall many depending packages, so you should rebuild them all from source (so they link on cv_bridge version built with OpenCV3). Well, if you want to use OpenCV3, I recommend upgrading to ROS Kinetic on ubuntu 16.04, for which cv_bridge is built with OpenCV3 by default. Otherwise, it may be just easier to use only OpenCV2 on Indigo so you don't have to rebuild everything. cheers, Mathieu |
|
|
Hi, I installed opencv 2.4.13 and tried building it again but it gave an error during catkin_make -j1
Invoking "make -j1" failed tried it with -j4 and then with just catkin_make but the error still remains. [ 77%] Linking CXX executable /home/d4sys/catkin_ws/devel/lib/rtabmap_ros/odom_msg_to_tf /usr/local/lib/libopencv_nonfree.so.2.4.13: undefined reference to `cv::ocl::integral(cv::ocl::ocvMat const&, cv::ocl::oclMat&)' collect2: error: ld returned 1 exit status make[2]: *** [/home/d4sys/catkin_ws/devel/lib/rtabmap_ros/odom_msg_to_tf] Error 1 make[1]: *** [rtabmap_ros/CMakeFiles/odom_msg_to_tf.dir/all] Error 2 make: *** [all] Error 2 Invoking "make -j1" failed Regards |
|
Administrator
|
This post was updated on .
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |