RTABMAP to be integrated for two ZED2i cameras


|
This post was updated on .
 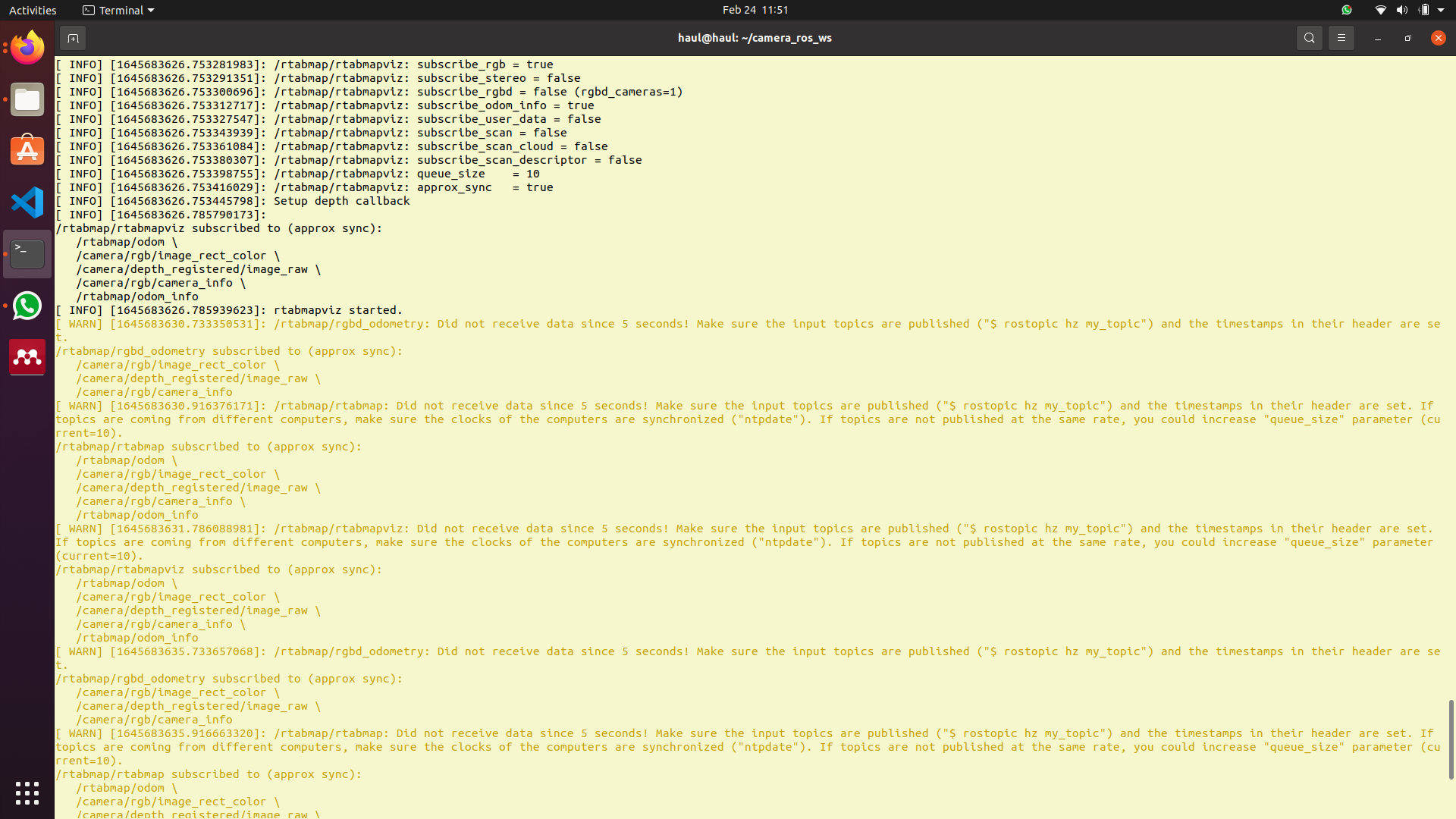 Hi, I have 2 doubts: 1. i have 2 ros packages : rtabmap_ros from https://github.com/introlab/rtabmap_ros and zed_rtabmap_examples ros package from https://github.com/stereolabs/zed-ros-examples/tree/master/examples When i use rtabmap_ros package and launch the file roslaunch rtabmap_ros rtabmap.launch Output in terminal is: Did not receive data since 5 seconds! but when i use zed_rtabmap_exapmle package and launch using roslaunch zed_rtabmap_example zed_rtabmap.launch I get the output correctly. I am able to map and .dbfile is saved. 2. when in terminal i directly use rtabmap -> and use the above .db file. i am unable to select the zed camera checkbox "ZED sdk" , i selected the stereo usb camera and click on start : RTAB-Map in metric SLAM mode cannot run with an uncalibrated camera. Do you want to calibrate the camera now? or i get camera intialisation failed. 3. Can u please guide me how to use multiple zed 2i camera for rtabmap for slam. |
|
Administrator
|
Hi,
what you experienced is normal. To use rtabmap.launch directly, you should remap the input topics to those from zed wrapper. You can look at the stereo example here or the RGB-D example here, following the zed instructions. When you type "rtabmap" in terminal, you will open the standalone version of rtabmap (without ros). If the ros binaries are used, most camera drivers are not available as we assume that you will be using the camera ros drivers, which are outside rtabmap. If you are interested to use zed sdk driver inside the standalone version, you should rebuild rtabmap library from source (cmake should be able to find zed sdk if installed). However the standalone cannot open stream from 2 cameras, you still have to use the ros package. I don't have official examples with two zed cameras, but we could make one based on this launch file and example from there. You will the need latest version of rtabmap_ros to work with the examples below as I just implemented the correct multi-camera callback for rgbd_odometry. It can work like the kinect demo above, but there could be synchronization issues between the odom and rtabmap nodes. Here is a launch file working with two zeds (demo_two_zeds.launch): <!-- --> <launch> <!-- Multi-cameras demo with 2 zed cameras --> <!-- Choose visualization --> <arg name="rviz" default="false" /> <arg name="rtabmapviz" default="true" /> <!-- Set to false to use just one of the cameras for odometry Set to 0 to use both cameras for odometry. --> <arg name="multicamera_odom" default="true"/> <!-- Cameras --> <param name="/zed1_node/depth_confidence" value="100"/> <param name="/zed1_node/depth_texture_conf" value="90"/> <include file="$(find zed_wrapper)/launch/zed_no_tf.launch"> <arg name="camera_name" value="zed1" /> <arg name="node_name" value="zed1_node" /> <arg name="camera_model" value="zed2i" /> <!-- 'zed' or 'zedm' or 'zed2' or 'zed2i' --> <arg name="camera_id" value="0" /> </include> <param name="/zed2_node/depth_confidence" value="100"/> <param name="/zed2_node/depth_texture_conf" value="90"/> <include file="$(find zed_wrapper)/launch/zed_no_tf.launch"> <arg name="camera_name" value="zed2" /> <arg name="node_name" value="zed2_node" /> <arg name="camera_model" value="zed2i" /> <!-- 'zed' or 'zedm' or 'zed2' or 'zed2i' --> <arg name="camera_id" value="1" /> <!-- Frames: Cameras are placed back to back --> <arg name="cam_pos_x" default="-0.06" /> <arg name="cam_yaw" default="3.14159265359" /> </include> <!-- exact sync rgb/depth images per camera --> <group ns="camera1"> <node pkg="rtabmap_ros" type="rgbd_sync" name="rgbd_sync1"> <remap from="rgb/image" to="/zed1_node/rgb/image_rect_color"/> <remap from="depth/image" to="/zed1_node/depth/depth_registered"/> <remap from="rgb/camera_info" to="/zed1_node/rgb/camera_info"/> <param name="approx_sync" value="false"/> </node> </group> <group ns="camera2"> <node pkg="rtabmap_ros" type="rgbd_sync" name="rgbd_sync2"> <remap from="rgb/image" to="/zed2_node/rgb/image_rect_color"/> <remap from="depth/image" to="/zed2_node/depth/depth_registered"/> <remap from="rgb/camera_info" to="/zed2_node/rgb/camera_info"/> <param name="approx_sync" value="false"/> </node> </group> <group ns="rtabmap"> <!-- approx sync cameras together --> <node pkg="rtabmap_ros" type="rgbdx_sync" name="rgbdx_sync"> <remap from="rgbd_image0" to="/camera1/rgbd_image"/> <remap from="rgbd_image1" to="/camera2/rgbd_image"/> <param name="rgbd_cameras" type="int" value="2"/> <param name="approx_sync" type="bool" value="true"/> </node> <!-- Odometry --> <node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen"> <remap from="rgbd_image" to="/camera1/rgbd_image"/> <!-- for single camera odom, see below --> <remap from="rgbd_images" to="rgbd_images"/> <!-- for multi-camera odom, see below --> <remap from="imu" to="/zed1_node/imu/data"/> <param name="subscribe_rgbd" type="bool" value="true"/> <param name="frame_id" type="string" value="base_link"/> <param name="wait_imu_to_init" type="bool" value="true"/> <!-- set to false for "zed" camera model --> <param if="$(arg multicamera_odom)" name="rgbd_cameras" type="int" value="0"/> <param unless="$(arg multicamera_odom)" name="rgbd_cameras" type="int" value="1"/> <!-- Multi-camera required odometry parameters --> <param if="$(arg multicamera_odom)" name="OdomF2M/BundleAdjustment" type="string" value="0"/> <param if="$(arg multicamera_odom)" name="Vis/EstimationType" type="string" value="0"/> <param if="$(arg multicamera_odom)" name="Vis/CorGuessWinSize" type="string" value="0"/> </node> <!-- Visual SLAM (robot side) --> <!-- args: "delete_db_on_start" and "udebug" --> <node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start"> <param name="subscribe_depth" type="bool" value="false"/> <param name="subscribe_rgbd" type="bool" value="true"/> <param name="rgbd_cameras" type="int" value="0"/> <!-- 0 to use rgbd_images input --> <param name="frame_id" type="string" value="base_link"/> <param name="approx_symc" type="bool" value="false"/> <param name="Vis/EstimationType" type="string" value="0"/> <!-- should be 0 for multi-cameras --> <remap from="imu" to="/zed1_node/imu/data"/> </node> <!-- Visualisation RTAB-Map --> <node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen"> <param name="subscribe_depth" type="bool" value="false"/> <param name="subscribe_rgbd" type="bool" value="true"/> <param name="subscribe_odom_info" type="bool" value="true"/> <param name="frame_id" type="string" value="base_link"/> <param if="$(arg multicamera_odom)" name="rgbd_cameras" type="int" value="0"/> <param unless="$(arg multicamera_odom)" name="rgbd_cameras" type="int" value="1"/> <param name="approx_symc" type="bool" value="false"/> <remap unless="$(arg multicamera_odom)" from="rgbd_image" to="/camera1/rgbd_image"/> </node> </group> <!-- Visualization RVIZ --> <node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/rgbd.rviz"/> </launch> Note however that we have to patch zed_no_tf.launch file to correctly use it with two cameras (multicamera.patch): diff --git a/zed_wrapper/launch/zed_no_tf.launch b/zed_wrapper/launch/zed_no_tf.launch index c6514e7..02832ed 100644 --- a/zed_wrapper/launch/zed_no_tf.launch +++ b/zed_wrapper/launch/zed_no_tf.launch @@ -48,7 +48,7 @@ OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. <!-- ROS URDF description of the ZED --> <group if="$(arg publish_urdf)"> - <param name="zed_description" + <param name="$(arg node_name)_description" command="$(find xacro)/xacro '$(find zed_wrapper)/urdf/zed_descr.urdf.xacro' camera_name:=$(arg camera_name) camera_model:=$(arg camera_model) @@ -61,8 +61,8 @@ OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. cam_yaw:=$(arg cam_yaw)" /> - <node name="zed_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" required="true"> - <remap from="robot_description" to="zed_description" /> + <node name="$(arg node_name)_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" required="true"> + <remap from="robot_description" to="$(arg node_name)_description" /> </node> </group> diff --git a/zed_wrapper/params/common.yaml b/zed_wrapper/params/common.yaml index 1088e09..e44e9f0 100644 --- a/zed_wrapper/params/common.yaml +++ b/zed_wrapper/params/common.yaml @@ -23,7 +23,7 @@ general: camera_name: zed # A name for the camera (can be different from camera model and node name and can be overwritten by the launch file) zed_id: 0 serial_number: 0 - resolution: 2 # '0': HD2K, '1': HD1080, '2': HD720, '3': VGA + resolution: 3 # '0': HD2K, '1': HD1080, '2': HD720, '3': VGA grab_frame_rate: 15 # Frequency of frame grabbing for internal SDK operations gpu_id: -1 base_frame: 'base_link' # must be equal to the frame_id used in the URDF file @@ -37,7 +37,7 @@ video: extrinsic_in_camera_frame: true # if `false` extrinsic parameter in `camera_info` will use ROS native frame (X FORWARD, Z UP) instead of the camera frame (Z FORWARD, Y DOWN) [`true` use old behavior as for version < v3.1] depth: - quality: 4 # '0': NONE, '1': PERFORMANCE, '2': QUALITY, '3': ULTRA, '4': NEURAL + quality: 1 # '0': NONE, '1': PERFORMANCE, '2': QUALITY, '3': ULTRA, '4': NEURAL sensing_mode: 0 # '0': STANDARD, '1': FILL (not use FILL for robotic applications) depth_stabilization: 1 # `0`: disabled, `1`: enabled openni_depth_mode: false # 'false': 32bit float meters, 'true': 16bit uchar millimeters Usage: # multicamera odometry roslaunch demo_two_zeds.launch # single camera odometry roslaunch demo_two_zeds.launch multicamera_odom:=falseThe resulting tf tree would look like this: rosrun tf2_tools view_frames 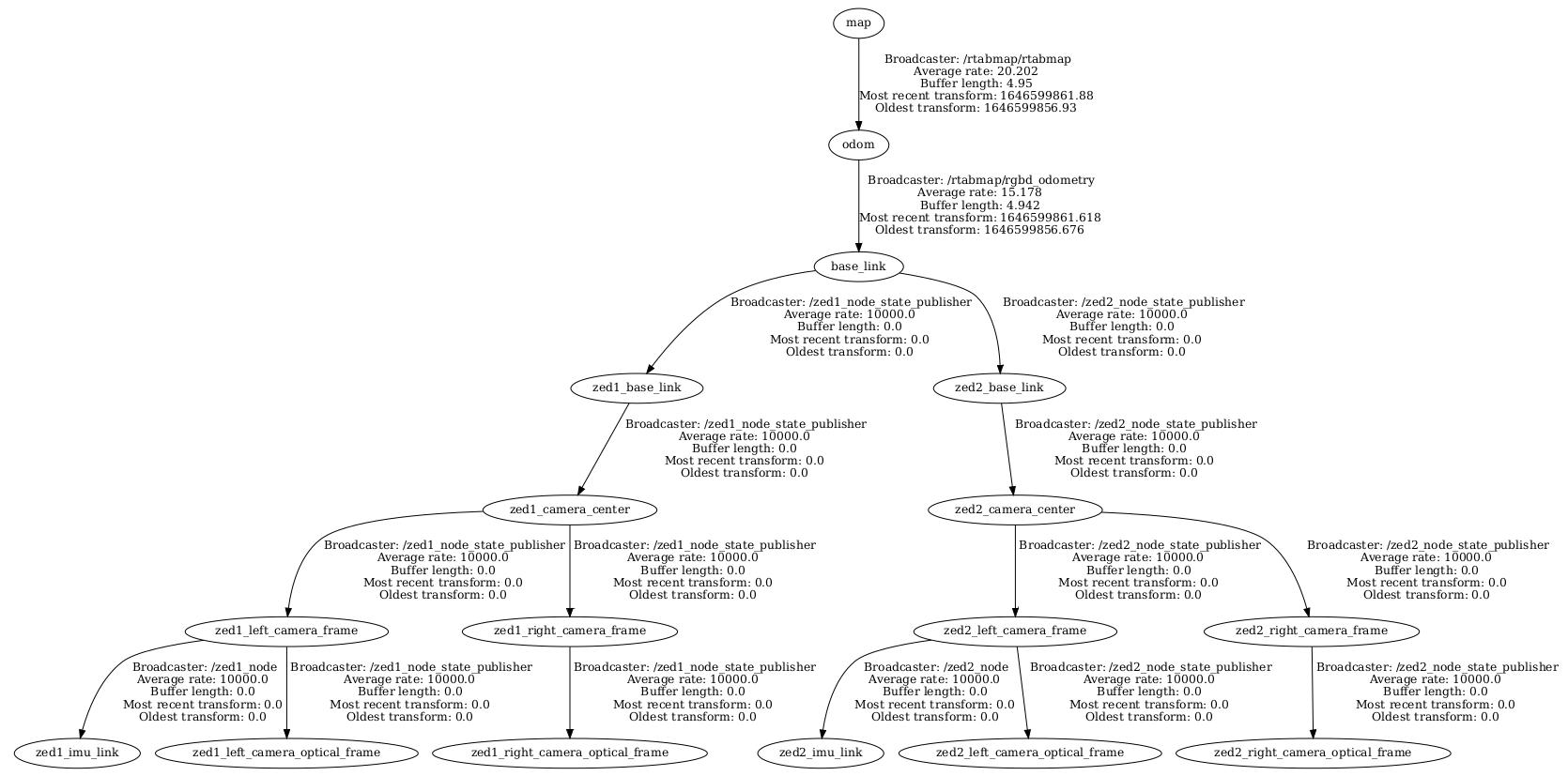 cheers,
cheers,Mathieu |
|
|
This post was updated on .
Hi mathieu,
Thanks a lot for your response. I am getting this error when i run the launch file, i feel my odometry is not syncing properly. Screenshot_from_2022-03-07_17-34-14.png |
|
Administrator
|
Hi,
the log error at the beginning is fine. It is a warning telling you that local bundle adjustement is not supported with multi-camera. You can explicitly set OdomF2M/BundleAdjustment to 0 to suppress that error. The warning "Message of type 1 arrived closer....", I don't know where it is coming from. You can use rqt_console to see which node is publishing that log. |
|
|
Hi Mathieu,
CAn you please help out with this error as well. "[ERROR] (2022-03-08 12:19:30.076) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 523 is ignored! " started roslaunch server http://haul:39993/ SUMMARY ======== PARAMETERS * /rosdistro: noetic * /rosversion: 1.15.14 * /rtabmap/rgbd_odometry/Odom/FillInfoData: true * /rtabmap/rgbd_odometry/Odom/Strategy: 0 * /rtabmap/rgbd_odometry/OdomF2M/MaxSize: 1000 * /rtabmap/rgbd_odometry/Vis/CorGuessWinSize: 0 * /rtabmap/rgbd_odometry/Vis/CorNNType: 3 * /rtabmap/rgbd_odometry/Vis/EstimationType: 0 * /rtabmap/rgbd_odometry/Vis/FeatureType: 6 * /rtabmap/rgbd_odometry/Vis/InlierDistance: 0.02 * /rtabmap/rgbd_odometry/Vis/MaxDepth: 4.0 * /rtabmap/rgbd_odometry/Vis/MinInliers: 20 * /rtabmap/rgbd_odometry/frame_id: base_link * /rtabmap/rgbd_odometry/rgbd_cameras: 2 * /rtabmap/rgbd_odometry/subscribe_rgbd: True * /rtabmap/rgbd_odometry/wait_for_transform: True * /rtabmap/rtabmap/Grid/FromDepth: false * /rtabmap/rtabmap/Vis/CorGuessWinSize: 0 * /rtabmap/rtabmap/Vis/EstimationType: 0 * /rtabmap/rtabmap/Vis/InlierDistance: 0.02 * /rtabmap/rtabmap/Vis/MinInliers: 10 * /rtabmap/rtabmap/frame_id: base_link * /rtabmap/rtabmap/gen_scan: True * /rtabmap/rtabmap/map_negative_poses_ignored: False * /rtabmap/rtabmap/map_negative_scan_empty_ray_tracing: False * /rtabmap/rtabmap/rgbd_cameras: 2 * /rtabmap/rtabmap/subscribe_depth: False * /rtabmap/rtabmap/subscribe_rgbd: True * /rtabmap/rtabmap/wait_for_transform: True * /rtabmap/rtabmapviz/frame_id: base_link * /rtabmap/rtabmapviz/rgbd_cameras: 2 * /rtabmap/rtabmapviz/subscribe_depth: False * /rtabmap/rtabmapviz/subscribe_odom_info: True * /rtabmap/rtabmapviz/subscribe_rgbd: True * /rtabmap/rtabmapviz/wait_for_transform: True * /zedA/rgbd_sync/approx_sync: False * /zedA/zed_description: <?xml version="1.... * /zedA/zed_node_A/auto_exposure_gain: True * /zedA/zed_node_A/auto_whitebalance: True * /zedA/zed_node_A/brightness: 4 * /zedA/zed_node_A/contrast: 4 * /zedA/zed_node_A/depth/depth_downsample_factor: 1.0 * /zedA/zed_node_A/depth/depth_stabilization: 1 * /zedA/zed_node_A/depth/max_depth: 20.0 * /zedA/zed_node_A/depth/min_depth: 0.3 * /zedA/zed_node_A/depth/openni_depth_mode: False * /zedA/zed_node_A/depth/quality: 1 * /zedA/zed_node_A/depth/sensing_mode: 0 * /zedA/zed_node_A/depth_confidence: 50 * /zedA/zed_node_A/depth_texture_conf: 100 * /zedA/zed_node_A/exposure: 100 * /zedA/zed_node_A/gain: 100 * /zedA/zed_node_A/gamma: 8 * /zedA/zed_node_A/general/base_frame: base_link * /zedA/zed_node_A/general/camera_flip: False * /zedA/zed_node_A/general/camera_model: zed2i * /zedA/zed_node_A/general/camera_name: zedA * /zedA/zed_node_A/general/gpu_id: -1 * /zedA/zed_node_A/general/grab_frame_rate: 15 * /zedA/zed_node_A/general/resolution: 2 * /zedA/zed_node_A/general/self_calib: True * /zedA/zed_node_A/general/serial_number: 0 * /zedA/zed_node_A/general/stream: * /zedA/zed_node_A/general/svo_compression: 1 * /zedA/zed_node_A/general/svo_file: * /zedA/zed_node_A/general/verbose: False * /zedA/zed_node_A/general/zed_id: 0 * /zedA/zed_node_A/hue: 0 * /zedA/zed_node_A/mapping/fused_pointcloud_freq: 1.0 * /zedA/zed_node_A/mapping/mapping_enabled: False * /zedA/zed_node_A/mapping/max_mapping_range: -1 * /zedA/zed_node_A/mapping/resolution: 0.05 * /zedA/zed_node_A/object_detection/body_fitting: False * /zedA/zed_node_A/object_detection/confidence_threshold: 50 * /zedA/zed_node_A/object_detection/max_range: 15.0 * /zedA/zed_node_A/object_detection/mc_animal: True * /zedA/zed_node_A/object_detection/mc_bag: True * /zedA/zed_node_A/object_detection/mc_electronics: True * /zedA/zed_node_A/object_detection/mc_fruit_vegetable: True * /zedA/zed_node_A/object_detection/mc_people: True * /zedA/zed_node_A/object_detection/mc_vehicle: True * /zedA/zed_node_A/object_detection/model: 3 * /zedA/zed_node_A/object_detection/object_tracking_enabled: True * /zedA/zed_node_A/object_detection/od_enabled: False * /zedA/zed_node_A/point_cloud_freq: 100.0 * /zedA/zed_node_A/pos_tracking/area_memory: True * /zedA/zed_node_A/pos_tracking/area_memory_db_path: zed_area_memory.area * /zedA/zed_node_A/pos_tracking/fixed_z_value: 0.0 * /zedA/zed_node_A/pos_tracking/floor_alignment: False * /zedA/zed_node_A/pos_tracking/imu_fusion: True * /zedA/zed_node_A/pos_tracking/init_odom_with_first_valid_pose: True * /zedA/zed_node_A/pos_tracking/initial_base_pose: [0.0, 0.0, 0.0, 0... * /zedA/zed_node_A/pos_tracking/map_frame: map * /zedA/zed_node_A/pos_tracking/odometry_frame: odom * /zedA/zed_node_A/pos_tracking/path_max_count: -1 * /zedA/zed_node_A/pos_tracking/path_pub_rate: 2.0 * /zedA/zed_node_A/pos_tracking/pos_tracking_enabled: True * /zedA/zed_node_A/pos_tracking/publish_map_tf: True * /zedA/zed_node_A/pos_tracking/publish_tf: True * /zedA/zed_node_A/pos_tracking/save_area_memory_db_on_exit: False * /zedA/zed_node_A/pos_tracking/two_d_mode: False * /zedA/zed_node_A/pub_frame_rate: 100.0 * /zedA/zed_node_A/saturation: 4 * /zedA/zed_node_A/sensors/publish_imu_tf: True * /zedA/zed_node_A/sensors/sensors_timestamp_sync: False * /zedA/zed_node_A/sharpness: 4 * /zedA/zed_node_A/video/extrinsic_in_camera_frame: True * /zedA/zed_node_A/video/img_downsample_factor: 1.0 * /zedA/zed_node_A/whitebalance_temperature: 42 * /zedB/rgbd_sync/approx_sync: False * /zedB/zed_description: <?xml version="1.... * /zedB/zed_node_B/auto_exposure_gain: True * /zedB/zed_node_B/auto_whitebalance: True * /zedB/zed_node_B/brightness: 4 * /zedB/zed_node_B/contrast: 4 * /zedB/zed_node_B/depth/depth_downsample_factor: 1.0 * /zedB/zed_node_B/depth/depth_stabilization: 1 * /zedB/zed_node_B/depth/max_depth: 20.0 * /zedB/zed_node_B/depth/min_depth: 0.3 * /zedB/zed_node_B/depth/openni_depth_mode: False * /zedB/zed_node_B/depth/quality: 1 * /zedB/zed_node_B/depth/sensing_mode: 0 * /zedB/zed_node_B/depth_confidence: 50 * /zedB/zed_node_B/depth_texture_conf: 100 * /zedB/zed_node_B/exposure: 100 * /zedB/zed_node_B/gain: 100 * /zedB/zed_node_B/gamma: 8 * /zedB/zed_node_B/general/base_frame: base_link * /zedB/zed_node_B/general/camera_flip: False * /zedB/zed_node_B/general/camera_model: zed2i * /zedB/zed_node_B/general/camera_name: zedB * /zedB/zed_node_B/general/gpu_id: -1 * /zedB/zed_node_B/general/grab_frame_rate: 15 * /zedB/zed_node_B/general/resolution: 2 * /zedB/zed_node_B/general/self_calib: True * /zedB/zed_node_B/general/serial_number: 0 * /zedB/zed_node_B/general/stream: * /zedB/zed_node_B/general/svo_compression: 1 * /zedB/zed_node_B/general/svo_file: * /zedB/zed_node_B/general/verbose: False * /zedB/zed_node_B/general/zed_id: 1 * /zedB/zed_node_B/hue: 0 * /zedB/zed_node_B/mapping/fused_pointcloud_freq: 1.0 * /zedB/zed_node_B/mapping/mapping_enabled: False * /zedB/zed_node_B/mapping/max_mapping_range: -1 * /zedB/zed_node_B/mapping/resolution: 0.05 * /zedB/zed_node_B/object_detection/body_fitting: False * /zedB/zed_node_B/object_detection/confidence_threshold: 50 * /zedB/zed_node_B/object_detection/max_range: 15.0 * /zedB/zed_node_B/object_detection/mc_animal: True * /zedB/zed_node_B/object_detection/mc_bag: True * /zedB/zed_node_B/object_detection/mc_electronics: True * /zedB/zed_node_B/object_detection/mc_fruit_vegetable: True * /zedB/zed_node_B/object_detection/mc_people: True * /zedB/zed_node_B/object_detection/mc_vehicle: True * /zedB/zed_node_B/object_detection/model: 3 * /zedB/zed_node_B/object_detection/object_tracking_enabled: True * /zedB/zed_node_B/object_detection/od_enabled: False * /zedB/zed_node_B/point_cloud_freq: 100.0 * /zedB/zed_node_B/pos_tracking/area_memory: True * /zedB/zed_node_B/pos_tracking/area_memory_db_path: zed_area_memory.area * /zedB/zed_node_B/pos_tracking/fixed_z_value: 0.0 * /zedB/zed_node_B/pos_tracking/floor_alignment: False * /zedB/zed_node_B/pos_tracking/imu_fusion: True * /zedB/zed_node_B/pos_tracking/init_odom_with_first_valid_pose: True * /zedB/zed_node_B/pos_tracking/initial_base_pose: [0.0, 0.0, 0.0, 0... * /zedB/zed_node_B/pos_tracking/map_frame: map * /zedB/zed_node_B/pos_tracking/odometry_frame: odom * /zedB/zed_node_B/pos_tracking/path_max_count: -1 * /zedB/zed_node_B/pos_tracking/path_pub_rate: 2.0 * /zedB/zed_node_B/pos_tracking/pos_tracking_enabled: True * /zedB/zed_node_B/pos_tracking/publish_map_tf: False * /zedB/zed_node_B/pos_tracking/publish_tf: False * /zedB/zed_node_B/pos_tracking/save_area_memory_db_on_exit: False * /zedB/zed_node_B/pos_tracking/two_d_mode: False * /zedB/zed_node_B/pub_frame_rate: 100.0 * /zedB/zed_node_B/saturation: 4 * /zedB/zed_node_B/sensors/publish_imu_tf: True * /zedB/zed_node_B/sensors/sensors_timestamp_sync: False * /zedB/zed_node_B/sharpness: 4 * /zedB/zed_node_B/video/extrinsic_in_camera_frame: True * /zedB/zed_node_B/video/img_downsample_factor: 1.0 * /zedB/zed_node_B/whitebalance_temperature: 42 NODES / rviz (rviz/rviz) /rtabmap/ rgbd_odometry (rtabmap_ros/rgbd_odometry) rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) /zedA/ base_to_camera0_tf (tf/static_transform_publisher) camera_nodelet_manager1 (nodelet/nodelet) rgbd_sync (nodelet/nodelet) zed_node_A (zed_wrapper/zed_wrapper_node) zed_state_publisher (robot_state_publisher/robot_state_publisher) /zedB/ base_to_camera1_tf (tf/static_transform_publisher) camera_nodelet_manager2 (nodelet/nodelet) rgbd_sync (nodelet/nodelet) zed_node_B (zed_wrapper/zed_wrapper_node) zed_state_publisher (robot_state_publisher/robot_state_publisher) auto-starting new master process[master]: started with pid [71460] ROS_MASTER_URI=http://localhost:11311 setting /run_id to d7049a24-9eab-11ec-87d5-b1a74fcb03e8 process[rosout-1]: started with pid [71477] started core service [/rosout] process[zedA/zed_state_publisher-2]: started with pid [71484] process[zedA/zed_node_A-3]: started with pid [71485] process[zedA/camera_nodelet_manager1-4]: started with pid [71486] process[zedA/rgbd_sync-5]: started with pid [71487] process[zedA/base_to_camera0_tf-6]: started with pid [71492] process[zedB/zed_state_publisher-7]: started with pid [71494] process[zedB/zed_node_B-8]: started with pid [71497] process[zedB/camera_nodelet_manager2-9]: started with pid [71507] [ INFO] [1646722143.579657309]: Initializing nodelet with 8 worker threads. process[zedB/rgbd_sync-10]: started with pid [71531] process[zedB/base_to_camera1_tf-11]: started with pid [71543] [ INFO] [1646722143.597571580]: ********** Starting nodelet '/zedA/zed_node_A' ********** [ INFO] [1646722143.597768580]: SDK version : 3.7.0 [ INFO] [1646722143.597841495]: *** GENERAL PARAMETERS *** [ INFO] [1646722143.598217196]: * Camera Name -> zedA process[rtabmap/rgbd_odometry-12]: started with pid [71546] [ INFO] [1646722143.598621303]: * Camera Resolution -> HD720 [ INFO] [1646722143.599042536]: * Camera Grab Framerate -> 15 [ INFO] [1646722143.599699471]: * Gpu ID -> -1 [ INFO] [1646722143.600116291]: * Camera ID -> -1 [ INFO] [1646722143.600830002]: * Verbose -> DISABLED [ INFO] [1646722143.602295735]: * Camera Flip -> DISABLED [ INFO] [1646722143.604248740]: * Self calibration -> ENABLED [ INFO] [1646722143.605446101]: * Camera Model by param -> zed2i [ INFO] [1646722143.605479194]: *** VIDEO PARAMETERS *** process[rtabmap/rtabmap-13]: started with pid [71556] [ INFO] [1646722143.606169390]: * Image resample factor -> 1 [ INFO] [1646722143.607148681]: * Extrinsic param. frame -> X RIGHT - Y DOWN - Z FWD [ INFO] [1646722143.607194903]: *** DEPTH PARAMETERS *** [ INFO] [1646722143.607736117]: * Depth quality -> PERFORMANCE [ INFO] [1646722143.608619694]: * Depth Sensing mode -> STANDARD [ INFO] [1646722143.609004793]: * OpenNI mode -> DISABLED [ INFO] [1646722143.609665557]: * Depth Stabilization -> ENABLED [ INFO] [1646722143.610364398]: * Minimum depth -> 0.3 m [ INFO] [1646722143.612234212]: * Maximum depth -> 20 m [ INFO] [1646722143.612829135]: * Depth resample factor -> 1 [ INFO] [1646722143.612874867]: *** POSITIONAL TRACKING PARAMETERS *** [ INFO] [1646722143.613960606]: * Positional tracking -> ENABLED process[rtabmap/rtabmapviz-14]: started with pid [71562] [ INFO] [1646722143.614397175]: * Path rate -> 2 Hz [ INFO] [1646722143.615057774]: * Path history size -> 1 [ INFO] [1646722143.616050561]: * Odometry DB path -> /home/haul/.ros/zed_area_memory.area [ INFO] [1646722143.616641012]: Initializing nodelet with 8 worker threads. [ INFO] [1646722143.616994967]: * Save Area Memory on closing -> DISABLED [ INFO] [1646722143.618032535]: * Area Memory -> ENABLED [ INFO] [1646722143.619322267]: * IMU Fusion -> ENABLED [ INFO] [1646722143.620231263]: * Floor alignment -> DISABLED process[rviz-15]: started with pid [71573] [ INFO] [1646722143.622880484]: * Init Odometry with first valid pose data -> ENABLED [ INFO] [1646722143.624270386]: * Two D mode -> DISABLED [ INFO] [1646722143.625256228]: *** MAPPING PARAMETERS *** [ INFO] [1646722143.626229527]: * Mapping -> DISABLED [ INFO] [1646722143.626276567]: *** OBJECT DETECTION PARAMETERS *** [ INFO] [1646722143.627060629]: * Object Detection -> DISABLED [ INFO] [1646722143.627092659]: *** SENSORS PARAMETERS *** [ INFO] [1646722143.627763333]: * Sensors timestamp sync -> DISABLED [ INFO] [1646722143.627792991]: *** SVO PARAMETERS *** [ INFO] [1646722143.628162968]: * SVO input file: -> [ INFO] [1646722143.629048759]: * SVO REC compression -> H264 (AVCHD) [ INFO] [1646722143.629620033]: *** COORDINATE FRAMES *** [ INFO] [1646722143.632167310]: * map_frame -> map [ INFO] [1646722143.632202469]: * odometry_frame -> odom [ INFO] [1646722143.632218391]: * base_frame -> base_link [ INFO] [1646722143.632236048]: * camera_frame -> zedA_camera_center [ INFO] [1646722143.632250769]: * imu_link -> zedA_imu_link [ INFO] [1646722143.632265569]: * left_camera_frame -> zedA_left_camera_frame [ INFO] [1646722143.632280098]: * left_camera_optical_frame -> zedA_left_camera_optical_frame [ INFO] [1646722143.632293878]: * right_camera_frame -> zedA_right_camera_frame [ INFO] [1646722143.632308599]: * right_camera_optical_frame -> zedA_right_camera_optical_frame [ INFO] [1646722143.632326393]: * depth_frame -> zedA_left_camera_frame [ INFO] [1646722143.632346180]: * depth_optical_frame -> zedA_left_camera_optical_frame [ INFO] [1646722143.632364531]: * disparity_frame -> zedA_left_camera_frame [ INFO] [1646722143.632382224]: * disparity_optical_frame -> zedA_left_camera_optical_frame [ INFO] [1646722143.632412563]: * confidence_frame -> zedA_left_camera_frame [ INFO] [1646722143.632428705]: * confidence_optical_frame -> zedA_left_camera_optical_frame [ INFO] [1646722143.633433691]: * Broadcast odometry TF -> ENABLED [ INFO] [1646722143.634313211]: * Broadcast map pose TF -> ENABLED [ INFO] [1646722143.635095261]: * Broadcast IMU pose TF -> ENABLED [ INFO] [1646722143.635130811]: *** DYNAMIC PARAMETERS (Init. values) *** [ INFO] [1646722143.635444206]: * [DYN] Depth confidence -> 50 [ INFO] [1646722143.636014003]: * [DYN] Depth texture conf. -> 100 [ INFO] [1646722143.636408603]: * [DYN] pub_frame_rate -> 100 Hz [ INFO] [1646722143.636746905]: ********** Starting nodelet '/zedB/zed_node_B' ********** [ INFO] [1646722143.636809945]: SDK version : 3.7.0 [ INFO] [1646722143.636837775]: *** GENERAL PARAMETERS *** [ INFO] [1646722143.637009233]: * [DYN] point_cloud_freq -> 100 Hz [ INFO] [1646722143.637258453]: * Camera Name -> zedB [ INFO] [1646722143.637544248]: * [DYN] brightness -> 4 [ INFO] [1646722143.637806639]: * Camera Resolution -> HD720 [ INFO] [1646722143.638092962]: * [DYN] contrast -> 4 [ INFO] [1646722143.638346242]: * Camera Grab Framerate -> 15 [ INFO] [1646722143.638632112]: * [DYN] hue -> 0 [ INFO] [1646722143.638889242]: * Gpu ID -> -1 [ INFO] [1646722143.639175568]: * [DYN] saturation -> 4 [ INFO] [1646722143.639430888]: * Camera ID -> -1 [ INFO] [1646722143.639695606]: * [DYN] sharpness -> 4 [ INFO] [1646722143.639945545]: * Verbose -> DISABLED [ INFO] [1646722143.640203137]: * [DYN] gamma -> 8 [ INFO] [1646722143.640775448]: * [DYN] auto_exposure_gain -> ENABLED [ INFO] [1646722143.641035214]: * Camera Flip -> DISABLED [ INFO] [1646722143.642107227]: * Self calibration -> ENABLED [ INFO] [1646722143.642371422]: * [DYN] auto_whitebalance -> ENABLED [ INFO] [1646722143.642958831]: * Camera Model by param -> zed2i [ INFO] [1646722143.642988791]: *** VIDEO PARAMETERS *** [ INFO] [1646722143.643381151]: * Image resample factor -> 1 [ INFO] [1646722143.643931070]: * Extrinsic param. frame -> X RIGHT - Y DOWN - Z FWD [ INFO] [1646722143.643957123]: *** DEPTH PARAMETERS *** [ INFO] [1646722143.644486035]: * Depth quality -> PERFORMANCE [ INFO] [1646722143.645036906]: * Depth Sensing mode -> STANDARD [ INFO] [1646722143.645550428]: * OpenNI mode -> DISABLED [ INFO] [1646722143.646087373]: * Depth Stabilization -> ENABLED [ INFO] [1646722143.647933679]: * Minimum depth -> 0.3 m [ INFO] [1646722143.648453318]: * Maximum depth -> 20 m [ INFO] [1646722143.648896877]: * Depth resample factor -> 1 [ INFO] [1646722143.648925256]: *** POSITIONAL TRACKING PARAMETERS *** [ INFO] [1646722143.653502199]: * Positional tracking -> ENABLED [ INFO] [1646722143.655505146]: * Path rate -> 2 Hz [ INFO] [1646722143.655876010]: * Path history size -> 1 [ INFO] [1646722143.657056623]: * Odometry DB path -> /home/haul/.ros/zed_area_memory.area [ INFO] [1646722143.658513369]: * Camera coordinate system -> Right HANDED Z UP and X FORWARD [ INFO] [1646722143.658604199]: *** Opening ZED 2i... [ INFO] [1646722143.658794439]: * Save Area Memory on closing -> DISABLED [ INFO] [1646722143.659432503]: * Area Memory -> ENABLED [ INFO] [1646722143.660949704]: * IMU Fusion -> ENABLED [ INFO] [1646722143.662214483]: * Floor alignment -> DISABLED [ INFO] [1646722143.663051131]: * Init Odometry with first valid pose data -> ENABLED [ INFO] [1646722143.663990388]: * Two D mode -> DISABLED [ INFO] [1646722143.664742611]: *** MAPPING PARAMETERS *** [ INFO] [1646722143.665677645]: * Mapping -> DISABLED [ INFO] [1646722143.665706736]: *** OBJECT DETECTION PARAMETERS *** [ INFO] [1646722143.666390855]: * Object Detection -> DISABLED [ INFO] [1646722143.666417985]: *** SENSORS PARAMETERS *** [ INFO] [1646722143.666732463]: * Sensors timestamp sync -> DISABLED [ INFO] [1646722143.666755834]: *** SVO PARAMETERS *** [ INFO] [1646722143.667110843]: * SVO input file: -> [ INFO] [1646722143.667472924]: * SVO REC compression -> H264 (AVCHD) [ INFO] [1646722143.667796784]: *** COORDINATE FRAMES *** [ INFO] [1646722143.669586796]: * map_frame -> map [ INFO] [1646722143.669616053]: * odometry_frame -> odom [ INFO] [1646722143.669635173]: * base_frame -> base_link [ INFO] [1646722143.669653347]: * camera_frame -> zedB_camera_center [ INFO] [1646722143.669668017]: * imu_link -> zedB_imu_link [ INFO] [1646722143.669682693]: * left_camera_frame -> zedB_left_camera_frame [ INFO] [1646722143.669698086]: * left_camera_optical_frame -> zedB_left_camera_optical_frame [ INFO] [1646722143.669712907]: * right_camera_frame -> zedB_right_camera_frame [ INFO] [1646722143.669733317]: * right_camera_optical_frame -> zedB_right_camera_optical_frame [ INFO] [1646722143.669747259]: * depth_frame -> zedB_left_camera_frame [ INFO] [1646722143.669761291]: * depth_optical_frame -> zedB_left_camera_optical_frame [ INFO] [1646722143.669774928]: * disparity_frame -> zedB_left_camera_frame [ INFO] [1646722143.669788875]: * disparity_optical_frame -> zedB_left_camera_optical_frame [ INFO] [1646722143.669801937]: * confidence_frame -> zedB_left_camera_frame [ INFO] [1646722143.669818065]: * confidence_optical_frame -> zedB_left_camera_optical_frame [ INFO] [1646722143.670468873]: * Broadcast odometry TF -> DISABLED [ INFO] [1646722143.671760946]: * Broadcast map pose TF -> DISABLED [ INFO] [1646722143.672402730]: * Broadcast IMU pose TF -> ENABLED [ INFO] [1646722143.672429648]: *** DYNAMIC PARAMETERS (Init. values) *** [ INFO] [1646722143.672755397]: * [DYN] Depth confidence -> 50 [ INFO] [1646722143.673081669]: * [DYN] Depth texture conf. -> 100 [ INFO] [1646722143.673484867]: * [DYN] pub_frame_rate -> 100 Hz [ INFO] [1646722143.673986116]: * [DYN] point_cloud_freq -> 100 Hz [ INFO] [1646722143.674322878]: * [DYN] brightness -> 4 [ INFO] [1646722143.674648653]: * [DYN] contrast -> 4 [ INFO] [1646722143.674976794]: * [DYN] hue -> 0 [ INFO] [1646722143.675301531]: * [DYN] saturation -> 4 [ INFO] [1646722143.675632518]: * [DYN] sharpness -> 4 [ INFO] [1646722143.675969258]: * [DYN] gamma -> 8 [ INFO] [1646722143.676295455]: * [DYN] auto_exposure_gain -> ENABLED [ INFO] [1646722143.677201444]: * [DYN] auto_whitebalance -> ENABLED [ INFO] [1646722143.684195341]: * Camera coordinate system -> Right HANDED Z UP and X FORWARD [ INFO] [1646722143.684261674]: *** Opening ZED 2i... [ INFO] [1646722143.863828886]: rviz version 1.14.14 [ INFO] [1646722143.863870892]: compiled against Qt version 5.12.8 [ INFO] [1646722143.863881569]: compiled against OGRE version 1.9.0 (Ghadamon) [ INFO] [1646722143.879687054]: Forcing OpenGl version 0. [ INFO] [1646722143.962298776]: Starting node... [ INFO] [1646722144.036759154]: Initializing nodelet with 8 worker threads. [ INFO] [1646722144.069731817]: Initializing nodelet with 8 worker threads. [ INFO] [1646722144.171284273]: Odometry: frame_id = base_link [ INFO] [1646722144.171338758]: Odometry: odom_frame_id = odom [ INFO] [1646722144.171365445]: Odometry: publish_tf = true [ INFO] [1646722144.171389064]: Odometry: wait_for_transform = true [ INFO] [1646722144.171424433]: Odometry: wait_for_transform_duration = 0.100000 [ INFO] [1646722144.171460354]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 [ INFO] [1646722144.171480784]: Odometry: ground_truth_frame_id = [ INFO] [1646722144.171497018]: Odometry: ground_truth_base_frame_id = base_link [ INFO] [1646722144.171511911]: Odometry: config_path = [ INFO] [1646722144.171525022]: Odometry: publish_null_when_lost = true [ INFO] [1646722144.171538136]: Odometry: guess_frame_id = [ INFO] [1646722144.171551901]: Odometry: guess_min_translation = 0.000000 [ INFO] [1646722144.171565664]: Odometry: guess_min_rotation = 0.000000 [ INFO] [1646722144.171644684]: Odometry: guess_min_time = 0.000000 [ INFO] [1646722144.171657708]: Odometry: expected_update_rate = 0.000000 Hz [ INFO] [1646722144.171669375]: Odometry: max_update_rate = 0.000000 Hz [ INFO] [1646722144.171680615]: Odometry: wait_imu_to_init = false [ INFO] [1646722144.171709609]: Odometry: stereoParams_=0 visParams_=1 icpParams_=0 [ INFO] [1646722144.188499218]: Starting node... [ INFO] [1646722144.232070708]: Setting odometry parameter "Odom/FillInfoData"="true" [ INFO] [1646722144.256581097]: Setting odometry parameter "Odom/Strategy"="0" [ INFO] [1646722144.261484467]: Setting odometry parameter "OdomF2M/MaxSize"="1000" [ INFO] [1646722144.392482009]: rtabmapviz: Using configuration from "/home/haul/camera_ws/src/slam_2cameras/src/rtabmap_ros/launch/config/rgbd_gui.ini" [ INFO] [1646722144.401932737]: Setting odometry parameter "Vis/CorGuessWinSize"="0" [ INFO] [1646722144.403184679]: Setting odometry parameter "Vis/CorNNType"="3" [ INFO] [1646722144.406459045]: Setting odometry parameter "Vis/EstimationType"="0" [ INFO] [1646722144.406732451]: Setting odometry parameter "Vis/FeatureType"="6" [ INFO] [1646722144.409978444]: Setting odometry parameter "Vis/InlierDistance"="0.02" [ INFO] [1646722144.411200093]: Setting odometry parameter "Vis/MaxDepth"="4.0" [ INFO] [1646722144.414300052]: Setting odometry parameter "Vis/MinInliers"="20" [ WARN] [1646722144.473983127]: Parameter "map_negative_poses_ignored" has been removed. Use "map_always_update" instead. [ WARN] [1646722144.476268754]: Parameter "map_negative_scan_empty_ray_tracing" has been removed. Use "map_empty_ray_tracing" instead. [ INFO] [1646722144.479673764]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1646722144.479698576]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1646722144.479711486]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1646722144.479726833]: /rtabmap/rtabmap(maps): map_always_update = true [ INFO] [1646722144.479737688]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = false [ INFO] [1646722144.479753029]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1646722144.479761712]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1646722144.479770734]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1646722144.480413246]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1646722144.480463270]: Stereo is NOT SUPPORTED [ INFO] [1646722144.480536368]: OpenGL device: NVIDIA GeForce GTX 1650/PCIe/SSE2 [ INFO] [1646722144.480579617]: OpenGl version: 4.6 (GLSL 4.6). [ INFO] [1646722144.505677620]: rtabmap: frame_id = base_link [ INFO] [1646722144.505719627]: rtabmap: map_frame_id = map [ INFO] [1646722144.505742822]: rtabmap: use_action_for_goal = false [ INFO] [1646722144.505769450]: rtabmap: tf_delay = 0.050000 [ INFO] [1646722144.505785732]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1646722144.505806722]: rtabmap: odom_sensor_sync = false [ INFO] [1646722144.506219088]: rtabmap: gen_scan = true [ INFO] [1646722144.506244240]: rtabmap: gen_scan_max_depth = 4.000000 [ INFO] [1646722144.506264867]: rtabmap: gen_scan_min_depth = 0.000000 [ INFO] [1646722144.506279898]: rtabmap: gen_depth = false [ INFO] [1646722144.631600782]: RGBDOdometry: approx_sync = true [ INFO] [1646722144.631629583]: RGBDOdometry: queue_size = 5 [ INFO] [1646722144.631642854]: RGBDOdometry: subscribe_rgbd = true [ INFO] [1646722144.631656126]: RGBDOdometry: rgbd_cameras = 2 [ INFO] [1646722144.631666377]: RGBDOdometry: keep_color = false [ INFO] [1646722144.641261876]: /rtabmap/rgbd_odometry subscribed to (approx sync): /zedA/rgbd_image \ /zedB/rgbd_image [ INFO] [1646722144.850287670]: Setting RTAB-Map parameter "Vis/CorGuessWinSize"="0" [ INFO] [1646722144.854684136]: Setting RTAB-Map parameter "Vis/EstimationType"="0" [ INFO] [1646722144.857949876]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.02" [ INFO] [1646722144.862067629]: Setting RTAB-Map parameter "Vis/MinInliers"="10" [ WARN] [1646722144.883230462]: Rtabmap: Parameter name changed: "Grid/FromDepth" -> "Grid/Sensor". Please update your launch file accordingly. Value "false" is still set to the new parameter name. [ INFO] [1646722145.010632687]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan", "subscribe_scan_cloud" or "gen_scan" is true and Grid/Sensor is 0. [ INFO] [1646722145.012204918]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1646722145.012722299]: rtabmap: Deleted database "/home/haul/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1646722145.012763099]: rtabmap: Using database from "/home/haul/.ros/rtabmap.db" (0 MB). [ INFO] [1646722145.118146808]: rtabmap: Database version = "0.20.18". [ INFO] [1646722145.118215605]: rtabmap: SLAM mode (Mem/IncrementalMemory=true) [ WARN] [1646722145.148710187]: rtabmap: Parameters subscribe_rgb and subscribe_rgbd cannot be true at the same time. Parameter subscribe_rgb is set to false. [ INFO] [1646722145.150088651]: /rtabmap/rtabmap: subscribe_depth = false [ INFO] [1646722145.150109607]: /rtabmap/rtabmap: subscribe_rgb = false [ INFO] [1646722145.150125774]: /rtabmap/rtabmap: subscribe_stereo = false [ INFO] [1646722145.150142075]: /rtabmap/rtabmap: subscribe_rgbd = true (rgbd_cameras=2) [ INFO] [1646722145.150159724]: /rtabmap/rtabmap: subscribe_odom_info = false [ INFO] [1646722145.150176452]: /rtabmap/rtabmap: subscribe_user_data = false [ INFO] [1646722145.150201366]: /rtabmap/rtabmap: subscribe_scan = false [ INFO] [1646722145.150217082]: /rtabmap/rtabmap: subscribe_scan_cloud = false [ INFO] [1646722145.150235487]: /rtabmap/rtabmap: subscribe_scan_descriptor = false [ INFO] [1646722145.150258330]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1646722145.150279029]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1646722145.150328934]: Setup rgbd2 callback [ INFO] [1646722145.160805267]: /rtabmap/rtabmap subscribed to (approx sync): /rtabmap/odom \ /zedA/rgbd_image \ /zedB/rgbd_image libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile libpng warning: iCCP: known incorrect sRGB profile [ INFO] [1646722145.285683039]: rtabmap 0.20.18 started... [ INFO] [1646722145.306742181]: ZED connection -> SUCCESS [ INFO] [1646722145.401795242]: rtabmapviz: Reading parameters from the ROS server... [ INFO] [1646722145.532951986]: ZED connection -> SUCCESS [ INFO] [1646722145.572267947]: rtabmapviz: Parameters read = 353 [ INFO] [1646722145.572300449]: rtabmapviz: Parameters successfully read. [ INFO] [1646722145.744582795]: /rtabmap/rtabmapviz: subscribe_depth = false [ INFO] [1646722145.744633629]: /rtabmap/rtabmapviz: subscribe_rgb = false [ INFO] [1646722145.744643663]: /rtabmap/rtabmapviz: subscribe_stereo = false [ INFO] [1646722145.744658449]: /rtabmap/rtabmapviz: subscribe_rgbd = true (rgbd_cameras=2) [ INFO] [1646722145.744675116]: /rtabmap/rtabmapviz: subscribe_odom_info = true [ INFO] [1646722145.744690336]: /rtabmap/rtabmapviz: subscribe_user_data = false [ INFO] [1646722145.744704534]: /rtabmap/rtabmapviz: subscribe_scan = false [ INFO] [1646722145.744717676]: /rtabmap/rtabmapviz: subscribe_scan_cloud = false [ INFO] [1646722145.744729630]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false [ INFO] [1646722145.744742080]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1646722145.744754468]: /rtabmap/rtabmapviz: approx_sync = true [ INFO] [1646722145.744791643]: Setup rgbd2 callback [ INFO] [1646722145.786082404]: /rtabmap/rtabmapviz subscribed to (approx sync): /rtabmap/odom \ /zedA/rgbd_image \ /zedB/rgbd_image \ /rtabmap/odom_info [ INFO] [1646722145.786225382]: rtabmapviz started. [ INFO] [1646722147.306941636]: ... ZED ready [ INFO] [1646722147.306975137]: ZED SDK running on GPU #0 [ INFO] [1646722147.314603683]: Camera-IMU Transform: 561D03E815E0 0.999992 -0.002034 -0.003392 -0.002000 0.002036 0.999998 0.000506 -0.023000 0.003391 -0.000513 0.999994 0.000220 0.000000 0.000000 0.000000 1.000000 [ INFO] [1646722147.314643470]: * CAMERA MODEL -> ZED 2i [ INFO] [1646722147.314668247]: * Serial Number -> 32591269 [ INFO] [1646722147.314688948]: * Camera FW Version -> 1523 [ INFO] [1646722147.314707781]: * Sensors FW Version -> 778 [ INFO] [1646722147.337902434]: Advertised on topic /zedA/zed_node_A/rgb/image_rect_color [ INFO] [1646722147.337951690]: Advertised on topic /zedA/zed_node_A/rgb/camera_info [ INFO] [1646722147.338857481]: Advertised on topic /zedA/zed_node_A/rgb_raw/image_raw_color [ INFO] [1646722147.338877687]: Advertised on topic /zedA/zed_node_A/rgb_raw/camera_info [ INFO] [1646722147.339736322]: Advertised on topic /zedA/zed_node_A/left/image_rect_color [ INFO] [1646722147.339754061]: Advertised on topic /zedA/zed_node_A/left/camera_info [ INFO] [1646722147.340746655]: Advertised on topic /zedA/zed_node_A/left_raw/image_raw_color [ INFO] [1646722147.340777679]: Advertised on topic /zedA/zed_node_A/left_raw/camera_info [ INFO] [1646722147.341651348]: Advertised on topic /zedA/zed_node_A/right/image_rect_color [ INFO] [1646722147.341672171]: Advertised on topic /zedA/zed_node_A/right/camera_info [ INFO] [1646722147.342472319]: Advertised on topic /zedA/zed_node_A/right_raw/image_raw_color [ INFO] [1646722147.342491768]: Advertised on topic /zedA/zed_node_A/right_raw/camera_info [ INFO] [1646722147.343035915]: Advertised on topic /zedA/zed_node_A/rgb/image_rect_gray [ INFO] [1646722147.343054946]: Advertised on topic /zedA/zed_node_A/rgb/camera_info [ INFO] [1646722147.343584799]: Advertised on topic /zedA/zed_node_A/rgb_raw/image_raw_gray [ INFO] [1646722147.343603393]: Advertised on topic /zedA/zed_node_A/rgb_raw/camera_info [ INFO] [1646722147.344135703]: Advertised on topic /zedA/zed_node_A/left/image_rect_gray [ INFO] [1646722147.344155045]: Advertised on topic /zedA/zed_node_A/left/camera_info [ INFO] [1646722147.344725108]: Advertised on topic /zedA/zed_node_A/left_raw/image_raw_gray [ INFO] [1646722147.344744407]: Advertised on topic /zedA/zed_node_A/left_raw/camera_info [ INFO] [1646722147.345277910]: Advertised on topic /zedA/zed_node_A/right/image_rect_gray [ INFO] [1646722147.345296845]: Advertised on topic /zedA/zed_node_A/right/camera_info [ INFO] [1646722147.345881518]: Advertised on topic /zedA/zed_node_A/right_raw/image_raw_gray [ INFO] [1646722147.345905138]: Advertised on topic /zedA/zed_node_A/right_raw/camera_info [ INFO] [1646722147.346761008]: Advertised on topic /zedA/zed_node_A/depth/depth_registered [ INFO] [1646722147.346779611]: Advertised on topic /zedA/zed_node_A/depth/camera_info [ INFO] [1646722147.347301779]: Advertised on topic /zedA/zed_node_A/stereo/image_rect_color [ INFO] [1646722147.347801846]: Advertised on topic /zedA/zed_node_A/stereo_raw/image_raw_color [ INFO] [1646722147.348102748]: Advertised on topic /zedA/zed_node_A/confidence/confidence_map [ INFO] [1646722147.348411602]: Advertised on topic /zedA/zed_node_A/disparity/disparity_image [ INFO] [1646722147.348721756]: Advertised on topic /zedA/zed_node_A/point_cloud/cloud_registered [ INFO] [1646722147.349018054]: Advertised on topic /zedA/zed_node_A/pose [ INFO] [1646722147.349324672]: Advertised on topic /zedA/zed_node_A/pose_with_covariance [ INFO] [1646722147.349634738]: Advertised on topic /zedA/zed_node_A/odom [ INFO] [1646722147.349941763]: Advertised on topic /zedA/zed_node_A/path_odom [ INFO] [1646722147.350247972]: Advertised on topic /zedA/zed_node_A/path_map [ INFO] [1646722147.350599941]: Advertised on topic /zedA/zed_node_A/imu/data [ INFO] [1646722147.350910071]: Advertised on topic /zedA/zed_node_A/imu/data_raw [ INFO] [1646722147.351215007]: Advertised on topic /zedA/zed_node_A/imu/mag [ INFO] [1646722147.351535569]: Advertised on topic /zedA/zed_node_A/temperature/imu [ INFO] [1646722147.351832959]: Advertised on topic /zedA/zed_node_A/atm_press [ INFO] [1646722147.352137679]: Advertised on topic /zedA/zed_node_A/temperature/left [ INFO] [1646722147.352438822]: Advertised on topic /zedA/zed_node_A/temperature/right [ INFO] [1646722147.352828402]: Advertised on topic /zedA/zed_node_A/left_cam_imu_transform [LATCHED] [ INFO] [1646722147.354681116]: Published static transform 'zedA_imu_link' -> 'zedA_left_camera_frame' [ INFO] [1646722147.356868883]: *** Starting Positional Tracking *** [ INFO] [1646722147.356889223]: * Waiting for valid static transformations... [ INFO] [1646722147.356939901]: Static transform Sensor to Base [zedA_left_camera_frame -> base_link] [ INFO] [1646722147.356958269]: * Translation: {0.000,-0.060,-0.015} [ INFO] [1646722147.356971614]: * Rotation: {0.000,-0.000,0.000} [ INFO] [1646722147.356992433]: Static transform Sensor to Camera Center [zedA_left_camera_frame -> zedA_camera_center] [ INFO] [1646722147.357005709]: * Translation: {0.000,-0.060,0.000} [ INFO] [1646722147.357017367]: * Rotation: {0.000,-0.000,0.000} [ INFO] [1646722147.357037404]: Static transform Camera Center to Base [zedA_camera_center -> base_link] [ INFO] [1646722147.357055466]: * Translation: {0.000,0.000,-0.015} [ INFO] [1646722147.357069683]: * Rotation: {0.000,-0.000,0.000} [ INFO] [1646722147.457167409]: Initial ZED left camera pose (ZED pos. tracking): [ INFO] [1646722147.457234704]: * T: [0,0.06,0.015] [ INFO] [1646722147.457257808]: * Q: [0,0,0,1] [ WARN] [1646722147.457311773]: area_memory_db_path [/home/haul/.ros/zed_area_memory.area] doesn't exist or is unreachable. [ INFO] [1646722147.533109725]: ... ZED ready [ INFO] [1646722147.533147720]: ZED SDK running on GPU #0 [ INFO] [1646722147.541031102]: Camera-IMU Transform: 55D5E2F20360 0.999985 0.003499 -0.004196 -0.002000 -0.003494 0.999993 0.001044 -0.023000 0.004200 -0.001029 0.999991 0.000220 0.000000 0.000000 0.000000 1.000000 [ INFO] [1646722147.541064727]: * CAMERA MODEL -> ZED 2i [ INFO] [1646722147.541099972]: * Serial Number -> 31179479 [ INFO] [1646722147.541129541]: * Camera FW Version -> 1523 [ INFO] [1646722147.541164141]: * Sensors FW Version -> 777 [ INFO] [1646722147.569041523]: Advertised on topic /zedB/zed_node_B/rgb/image_rect_color [ INFO] [1646722147.569068283]: Advertised on topic /zedB/zed_node_B/rgb/camera_info [ INFO] [1646722147.570003424]: Advertised on topic /zedB/zed_node_B/rgb_raw/image_raw_color [ INFO] [1646722147.570020102]: Advertised on topic /zedB/zed_node_B/rgb_raw/camera_info [ INFO] [1646722147.570817843]: Advertised on topic /zedB/zed_node_B/left/image_rect_color [ INFO] [1646722147.570835213]: Advertised on topic /zedB/zed_node_B/left/camera_info [ INFO] [1646722147.571614009]: Advertised on topic /zedB/zed_node_B/left_raw/image_raw_color [ INFO] [1646722147.571629968]: Advertised on topic /zedB/zed_node_B/left_raw/camera_info [ INFO] [1646722147.572433434]: Advertised on topic /zedB/zed_node_B/right/image_rect_color [ INFO] [1646722147.572451402]: Advertised on topic /zedB/zed_node_B/right/camera_info [ INFO] [1646722147.573246677]: Advertised on topic /zedB/zed_node_B/right_raw/image_raw_color [ INFO] [1646722147.573261686]: Advertised on topic /zedB/zed_node_B/right_raw/camera_info [ INFO] [1646722147.573769552]: Advertised on topic /zedB/zed_node_B/rgb/image_rect_gray [ INFO] [1646722147.573795898]: Advertised on topic /zedB/zed_node_B/rgb/camera_info [ INFO] [1646722147.574320236]: Advertised on topic /zedB/zed_node_B/rgb_raw/image_raw_gray [ INFO] [1646722147.574341556]: Advertised on topic /zedB/zed_node_B/rgb_raw/camera_info [ INFO] [1646722147.574847661]: Advertised on topic /zedB/zed_node_B/left/image_rect_gray [ INFO] [1646722147.574866588]: Advertised on topic /zedB/zed_node_B/left/camera_info [ INFO] [1646722147.575360721]: Advertised on topic /zedB/zed_node_B/left_raw/image_raw_gray [ INFO] [1646722147.575376126]: Advertised on topic /zedB/zed_node_B/left_raw/camera_info [ INFO] [1646722147.575986179]: Advertised on topic /zedB/zed_node_B/right/image_rect_gray [ INFO] [1646722147.576002043]: Advertised on topic /zedB/zed_node_B/right/camera_info [ INFO] [1646722147.576820264]: Advertised on topic /zedB/zed_node_B/right_raw/image_raw_gray [ INFO] [1646722147.576847602]: Advertised on topic /zedB/zed_node_B/right_raw/camera_info [ INFO] [1646722147.577738735]: Advertised on topic /zedB/zed_node_B/depth/depth_registered [ INFO] [1646722147.577756456]: Advertised on topic /zedB/zed_node_B/depth/camera_info [ INFO] [1646722147.578278490]: Advertised on topic /zedB/zed_node_B/stereo/image_rect_color [ INFO] [1646722147.578783602]: Advertised on topic /zedB/zed_node_B/stereo_raw/image_raw_color [ INFO] [1646722147.579095513]: Advertised on topic /zedB/zed_node_B/confidence/confidence_map [ INFO] [1646722147.579393832]: Advertised on topic /zedB/zed_node_B/disparity/disparity_image [ INFO] [1646722147.579695008]: Advertised on topic /zedB/zed_node_B/point_cloud/cloud_registered [ INFO] [1646722147.579992503]: Advertised on topic /zedB/zed_node_B/pose [ INFO] [1646722147.580285328]: Advertised on topic /zedB/zed_node_B/pose_with_covariance [ INFO] [1646722147.580601218]: Advertised on topic /zedB/zed_node_B/odom [ INFO] [1646722147.580893808]: Advertised on topic /zedB/zed_node_B/path_odom [ INFO] [1646722147.581259154]: Advertised on topic /zedB/zed_node_B/path_map [ INFO] [1646722147.581599740]: Advertised on topic /zedB/zed_node_B/imu/data [ INFO] [1646722147.581894883]: Advertised on topic /zedB/zed_node_B/imu/data_raw [ INFO] [1646722147.582192776]: Advertised on topic /zedB/zed_node_B/imu/mag [ INFO] [1646722147.582487244]: Advertised on topic /zedB/zed_node_B/temperature/imu [ INFO] [1646722147.582777606]: Advertised on topic /zedB/zed_node_B/atm_press [ INFO] [1646722147.583073259]: Advertised on topic /zedB/zed_node_B/temperature/left [ INFO] [1646722147.583365531]: Advertised on topic /zedB/zed_node_B/temperature/right [ INFO] [1646722147.583696474]: Advertised on topic /zedB/zed_node_B/left_cam_imu_transform [LATCHED] [ INFO] [1646722147.585544219]: Published static transform 'zedB_imu_link' -> 'zedB_left_camera_frame' [ INFO] [1646722147.590030887]: *** Starting Positional Tracking *** [ INFO] [1646722147.590062521]: * Waiting for valid static transformations... [ INFO] [1646722147.590149717]: Static transform Sensor to Base [zedB_left_camera_frame -> base_link] [ INFO] [1646722147.590169160]: * Translation: {-0.000,-0.340,0.025} [ INFO] [1646722147.590187157]: * Rotation: {0.000,-0.000,179.931} [ INFO] [1646722147.590212106]: Static transform Sensor to Camera Center [zedB_left_camera_frame -> zedB_camera_center] [ INFO] [1646722147.590229096]: * Translation: {0.000,-0.060,0.000} [ INFO] [1646722147.590249852]: * Rotation: {0.000,-0.000,0.000} [ INFO] [1646722147.590273241]: Static transform Camera Center to Base [zedB_camera_center -> base_link] [ INFO] [1646722147.590290831]: * Translation: {-0.000,-0.280,0.025} [ INFO] [1646722147.590310061]: * Rotation: {0.000,-0.000,179.931} [ INFO] [1646722147.650180242]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722147.650240081]: Odometry aligned to last tracking pose [ INFO] [1646722147.690481610]: Initial ZED left camera pose (ZED pos. tracking): [ INFO] [1646722147.690650917]: * T: [7.24408e-05,-0.34,-0.025] [ INFO] [1646722147.690694190]: * Q: [0,0,-1,0.00059802] [ WARN] [1646722147.690837495]: area_memory_db_path [/home/haul/.ros/zed_area_memory.area] doesn't exist or is unreachable. [ WARN] [1646722147.731918322]: Messages of type 1 arrived closer (0.066623000) than the lower bound you provided (0.500000000) (will print only once) [ INFO] [1646722147.779127190]: Positional tracking -> OK [OK] [ INFO] [1646722147.911109232]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722147.911245911]: Odometry aligned to last tracking pose [ERROR] (2022-03-08 12:19:07.976) OdometryF2M.cpp:231::computeTransform() Odometry bundle adjustment doesn't work with multi-cameras. It is disabled. [ WARN] [1646722148.031446234]: Messages of type 0 arrived closer (0.066623000) than the lower bound you provided (0.500000000) (will print only once) [ INFO] [1646722148.082149048]: Positional tracking -> OK [OK] [ INFO] [1646722148.115124713]: Odom: quality=0, std dev=99.995000m|99.995000rad, update time=0.138264s [ WARN] (2022-03-08 12:19:08.420) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=46) between -1 and 2" [ INFO] [1646722148.422467969]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.142645s [ INFO] [1646722148.461014122]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0247s, RTAB-Map=0.2749s, Maps update=0.0376s pub=0.0005s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:08.563) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=36) between -1 and 3" [ INFO] [1646722148.564544489]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.131774s [ WARN] (2022-03-08 12:19:08.715) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 4" [ INFO] [1646722148.718164804]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.131489s [ WARN] (2022-03-08 12:19:08.861) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=59) between -1 and 5" [ INFO] [1646722148.863378747]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.122304s [ INFO] [1646722148.951570099]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722149.018500907]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:09.029) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=41) between -1 and 6" [ INFO] [1646722149.030663009]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.150742s [ WARN] (2022-03-08 12:19:09.230) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=58) between -1 and 7" [ INFO] [1646722149.232144383]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.174417s [ERROR] (2022-03-08 12:19:09.281) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 23 is ignored! [ INFO] [1646722149.281615977]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0445s, RTAB-Map=0.0004s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:09.439) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=44) between -1 and 8" [ INFO] [1646722149.441054797]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.170631s [ INFO] [1646722149.463539977]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722149.536810407]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:09.666) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=53) between -1 and 9" [ INFO] [1646722149.670321612]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.187659s [ WARN] (2022-03-08 12:19:09.968) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 10" [ INFO] [1646722149.970260311]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.221436s [ INFO] [1646722150.086774312]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:10.186) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=48) between -1 and 11" [ INFO] [1646722150.189242373]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.151966s [ERROR] (2022-03-08 12:19:10.212) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 45 is ignored! [ INFO] [1646722150.212608706]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0232s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ INFO] [1646722150.216288022]: Positional tracking -> OK [OK] [ INFO] [1646722150.355728582]: Positional tracking -> Searching for a known position [SEARCHING] [pcl::RandomSampleConsensus::computeModel] RANSAC found no model. [ WARN] (2022-03-08 12:19:10.411) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 12" [ INFO] [1646722150.413572072]: Positional tracking -> OK [OK] [ INFO] [1646722150.416932830]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.183780s [ INFO] [1646722150.625330739]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:10.683) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=47) between -1 and 13" [ INFO] [1646722150.688368090]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.225045s [ INFO] [1646722150.727145272]: Positional tracking -> OK [OK] [ INFO] [1646722150.815272353]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:10.878) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=48) between -1 and 14" [ INFO] [1646722150.879431821]: Positional tracking -> OK [OK] [ INFO] [1646722150.881171287]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.171530s [ INFO] [1646722150.948677836]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:11.042) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=51) between -1 and 15" [ INFO] [1646722151.044597596]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.134704s [ INFO] [1646722151.084864725]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:11.211) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=31) between -1 and 16" [ INFO] [1646722151.212026127]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.142081s [ERROR] (2022-03-08 12:19:11.222) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 67 is ignored! [ INFO] [1646722151.222799642]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0104s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:11.377) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=53) between -1 and 17" [ INFO] [1646722151.378943168]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.110642s [ WARN] (2022-03-08 12:19:11.646) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 18" [ INFO] [1646722151.648500065]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.177344s [ WARN] (2022-03-08 12:19:11.806) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=45) between -1 and 19" [ INFO] [1646722151.806971573]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.136674s [ INFO] [1646722151.882187659]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722151.956825928]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:12.046) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=31) between -1 and 20" [ INFO] [1646722152.047728306]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.142768s [ INFO] [1646722152.081585993]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722152.149575262]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:12.193) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=32) between -1 and 21" [ INFO] [1646722152.195282316]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.129359s [ INFO] [1646722152.214273645]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:12.351) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=25) between -1 and 22" [ INFO] [1646722152.351936073]: Positional tracking -> OK [OK] [ INFO] [1646722152.352920509]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.112187s [ERROR] (2022-03-08 12:19:12.402) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 91 is ignored! [ INFO] [1646722152.402716858]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0357s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:12.534) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=37) between -1 and 23" [ INFO] [1646722152.537133230]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.162657s [ INFO] [1646722152.629769493]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722152.685869968]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:12.721) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 6/20 (matches=33) between -1 and 24" [ INFO] [1646722152.725087221]: Odom: quality=6, std dev=0.000000m|0.000000rad, update time=0.153420s [ WARN] (2022-03-08 12:19:12.919) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=53) between -1 and 25" [ INFO] [1646722152.921253523]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.125972s [ WARN] (2022-03-08 12:19:13.059) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=33) between -1 and 26" [ INFO] [1646722153.060623849]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.118487s [ WARN] (2022-03-08 12:19:13.259) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 5/20 (matches=45) between -1 and 27" [ INFO] [1646722153.262178724]: Odom: quality=5, std dev=0.000000m|0.000000rad, update time=0.121773s [ INFO] [1646722153.383403276]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:13.402) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=23) between -1 and 28" [ INFO] [1646722153.403602767]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.126449s [ INFO] [1646722153.451097645]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:13.543) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=51) between -1 and 29" [ INFO] [1646722153.544510687]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.122489s [ERROR] (2022-03-08 12:19:13.567) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 125 is ignored! [ INFO] [1646722153.567328319]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0222s, RTAB-Map=0.0005s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:13.672) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=42) between -1 and 30" [ INFO] [1646722153.672976020]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.080495s [ WARN] (2022-03-08 12:19:13.950) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=50) between -1 and 31" [ INFO] [1646722153.951645859]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.152973s [ WARN] (2022-03-08 12:19:14.090) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=43) between -1 and 32" [ INFO] [1646722154.092231327]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.124795s [ WARN] (2022-03-08 12:19:14.248) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=57) between -1 and 33" [ INFO] [1646722154.250508354]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.121875s [ WARN] (2022-03-08 12:19:14.427) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 34" [ INFO] [1646722154.429777864]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.143967s [ WARN] (2022-03-08 12:19:14.588) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=43) between -1 and 35" [ INFO] [1646722154.589843678]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.130845s [ERROR] (2022-03-08 12:19:14.627) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 149 is ignored! [ INFO] [1646722154.627829349]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0136s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:14.744) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=22) between -1 and 36" [ INFO] [1646722154.746389093]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.121177s [ WARN] (2022-03-08 12:19:15.027) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=51) between -1 and 37" [ INFO] [1646722155.029187389]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.186374s [ WARN] (2022-03-08 12:19:15.217) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=31) between -1 and 38" [ INFO] [1646722155.219618818]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.160533s [ WARN] (2022-03-08 12:19:15.483) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=49) between -1 and 39" [ INFO] [1646722155.486089645]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.209157s [ WARN] (2022-03-08 12:19:15.642) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=36) between -1 and 40" [ INFO] [1646722155.644308492]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.147301s [ WARN] (2022-03-08 12:19:15.771) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=47) between -1 and 41" [ INFO] [1646722155.776766835]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.111808s [ERROR] (2022-03-08 12:19:15.805) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 173 is ignored! [ INFO] [1646722155.806094795]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0329s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:15.904) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 42" [ INFO] [1646722155.907011304]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.111949s [ WARN] (2022-03-08 12:19:16.061) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=39) between -1 and 43" [ INFO] [1646722156.062568821]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.135240s [ INFO] [1646722156.150760637]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722156.224562130]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:16.371) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=46) between -1 and 44" [ INFO] [1646722156.374431449]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.205974s [ WARN] (2022-03-08 12:19:16.517) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=43) between -1 and 45" [ INFO] [1646722156.518818951]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.129467s [ WARN] (2022-03-08 12:19:16.723) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=32) between -1 and 46" [ INFO] [1646722156.724346967]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.163375s [ WARN] (2022-03-08 12:19:16.903) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=46) between -1 and 47" [ INFO] [1646722156.904317049]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.135552s [ERROR] (2022-03-08 12:19:16.925) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 205 is ignored! [ INFO] [1646722156.925247420]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0208s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ INFO] [1646722157.143834888]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:17.169) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=45) between -1 and 48" [ INFO] [1646722157.170550781]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.123813s [ INFO] [1646722157.216405148]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:17.317) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=56) between -1 and 49" [ INFO] [1646722157.319592258]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.132910s [ WARN] (2022-03-08 12:19:17.428) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=35) between -1 and 50" [ INFO] [1646722157.430868886]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.085638s [ INFO] [1646722157.614657722]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:17.651) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=35) between -1 and 51" [ INFO] [1646722157.652632649]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.126672s [ INFO] [1646722157.692562476]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:17.799) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 52" [ INFO] [1646722157.801143448]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.125570s [ERROR] (2022-03-08 12:19:17.822) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 229 is ignored! [ INFO] [1646722157.822346467]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0210s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:17.983) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=52) between -1 and 53" [ INFO] [1646722157.985702746]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.131179s [ WARN] (2022-03-08 12:19:18.196) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=54) between -1 and 54" [ INFO] [1646722158.198152115]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.146555s [ WARN] (2022-03-08 12:19:18.441) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=43) between -1 and 55" [ INFO] [1646722158.444629581]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.175681s [ WARN] (2022-03-08 12:19:18.647) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=38) between -1 and 56" [ INFO] [1646722158.648856321]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.129299s [ WARN] (2022-03-08 12:19:18.837) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=45) between -1 and 57" [ INFO] [1646722158.838351130]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.162533s [ WARN] (2022-03-08 12:19:18.956) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=50) between -1 and 58" [ INFO] [1646722158.958163609]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.100658s [ WARN] (2022-03-08 12:19:19.111) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=39) between -1 and 59" [ INFO] [1646722159.111944845]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.093443s [ERROR] (2022-03-08 12:19:19.132) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 257 is ignored! [ INFO] [1646722159.132981453]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0208s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:19.248) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=48) between -1 and 60" [ INFO] [1646722159.250125785]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.122462s [ WARN] (2022-03-08 12:19:19.401) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=38) between -1 and 61" [ INFO] [1646722159.402564297]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.134033s [ WARN] (2022-03-08 12:19:19.598) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=35) between -1 and 62" [ INFO] [1646722159.600155996]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.162352s [ WARN] (2022-03-08 12:19:19.819) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=52) between -1 and 63" [ INFO] [1646722159.821190646]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.152649s [ WARN] (2022-03-08 12:19:20.085) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=49) between -1 and 64" [ INFO] [1646722160.087081890]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.139200s [ERROR] (2022-03-08 12:19:20.124) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 279 is ignored! [ INFO] [1646722160.124793585]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0280s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:20.240) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=52) between -1 and 65" [ INFO] [1646722160.240986557]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.127339s [ WARN] (2022-03-08 12:19:20.419) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 66" [ INFO] [1646722160.420609354]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.155100s [ WARN] (2022-03-08 12:19:20.644) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=52) between -1 and 67" [ INFO] [1646722160.646809738]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.185989s [ WARN] (2022-03-08 12:19:20.933) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=58) between -1 and 68" [ INFO] [1646722160.935469256]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.180432s [ WARN] (2022-03-08 12:19:21.084) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 69" [ INFO] [1646722161.086480190]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.132852s [ WARN] (2022-03-08 12:19:21.211) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=56) between -1 and 70" [ INFO] [1646722161.213084446]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.098262s [ERROR] (2022-03-08 12:19:21.245) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 299 is ignored! [ INFO] [1646722161.245436934]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0321s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:21.351) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=42) between -1 and 71" [ INFO] [1646722161.357871802]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.125301s [ WARN] (2022-03-08 12:19:21.584) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=38) between -1 and 72" [ INFO] [1646722161.586794215]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.151710s [ WARN] (2022-03-08 12:19:21.829) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 73" [ INFO] [1646722161.830992975]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.107849s [ WARN] (2022-03-08 12:19:21.964) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=56) between -1 and 74" [ INFO] [1646722161.965562966]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.104597s [ INFO] [1646722162.016073702]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722162.085172790]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:22.099) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=49) between -1 and 75" [ INFO] [1646722162.100986698]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.118697s [ WARN] (2022-03-08 12:19:22.254) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=52) between -1 and 76" [ INFO] [1646722162.255535898]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.119177s [ERROR] (2022-03-08 12:19:22.272) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 325 is ignored! [ INFO] [1646722162.272555669]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0166s, RTAB-Map=0.0003s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ INFO] [1646722162.356493218]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:22.412) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=62) between -1 and 77" [ INFO] [1646722162.413237205]: Positional tracking -> OK [OK] [ INFO] [1646722162.414760286]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.137103s [ WARN] (2022-03-08 12:19:22.606) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=37) between -1 and 78" [ INFO] [1646722162.607829733]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.109132s [ WARN] (2022-03-08 12:19:22.806) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=53) between -1 and 79" [ INFO] [1646722162.809032351]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.135626s [ WARN] (2022-03-08 12:19:22.974) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=42) between -1 and 80" [ INFO] [1646722162.976155919]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.134429s [ WARN] (2022-03-08 12:19:23.079) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=39) between -1 and 81" [ INFO] [1646722163.080200637]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.089161s [ WARN] (2022-03-08 12:19:23.193) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=38) between -1 and 82" [ INFO] [1646722163.194018629]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.095893s [ INFO] [1646722163.252253146]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722163.318576169]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:23.339) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 83" [ INFO] [1646722163.340594116]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.129125s [ERROR] (2022-03-08 12:19:23.358) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 359 is ignored! [ INFO] [1646722163.358593590]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0177s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ INFO] [1646722163.413930045]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722163.488195376]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:23.550) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 84" [ INFO] [1646722163.552867055]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.149949s [ WARN] (2022-03-08 12:19:23.684) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=56) between -1 and 85" [ INFO] [1646722163.686397287]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.113175s [ WARN] (2022-03-08 12:19:23.874) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=48) between -1 and 86" [ INFO] [1646722163.876239581]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.136907s [ WARN] (2022-03-08 12:19:24.064) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=55) between -1 and 87" [ INFO] [1646722164.065618955]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.142429s [ WARN] (2022-03-08 12:19:24.147) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=51) between -1 and 88" [ INFO] [1646722164.148538019]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.060078s [ WARN] (2022-03-08 12:19:24.420) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=35) between -1 and 89" [ INFO] [1646722164.423438390]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.106460s [ WARN] (2022-03-08 12:19:24.565) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=59) between -1 and 90" [ INFO] [1646722164.567189872]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.131606s [ERROR] (2022-03-08 12:19:24.605) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 389 is ignored! [ INFO] [1646722164.605816620]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0350s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:24.704) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=50) between -1 and 91" [ INFO] [1646722164.705449191]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.078647s [ WARN] (2022-03-08 12:19:24.856) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=49) between -1 and 92" [ INFO] [1646722164.857419956]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.083685s [ WARN] (2022-03-08 12:19:25.031) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=34) between -1 and 93" [ INFO] [1646722165.033154001]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.095260s [ INFO] [1646722165.052188864]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722165.130899398]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:25.189) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=54) between -1 and 94" [ INFO] [1646722165.190758534]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.141006s [ WARN] (2022-03-08 12:19:25.316) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=53) between -1 and 95" [ INFO] [1646722165.317528819]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.090440s [ INFO] [1646722165.383856999]: Positional tracking -> Searching for a known position [SEARCHING] [ INFO] [1646722165.450559770]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:25.485) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 4/20 (matches=50) between -1 and 96" [ INFO] [1646722165.486647856]: Odom: quality=4, std dev=0.000000m|0.000000rad, update time=0.115214s [ERROR] (2022-03-08 12:19:25.506) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 417 is ignored! [ INFO] [1646722165.506585457]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0173s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:25.655) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=46) between -1 and 97" [ INFO] [1646722165.657242635]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.133485s [ WARN] (2022-03-08 12:19:25.784) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=50) between -1 and 98" [ INFO] [1646722165.785920893]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.107429s [ WARN] (2022-03-08 12:19:25.892) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 99" [ INFO] [1646722165.893730549]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.050830s [ INFO] [1646722166.016307808]: Positional tracking -> Searching for a known position [SEARCHING] [ WARN] (2022-03-08 12:19:26.044) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=54) between -1 and 100" [ INFO] [1646722166.046890670]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.120755s [ INFO] [1646722166.078792589]: Positional tracking -> OK [OK] [ WARN] (2022-03-08 12:19:26.148) util3d_registration.cpp:186::transformFromXYZCorrespondences() RANSAC refineModel: Refinement failed: got an empty set of inliers! [ WARN] (2022-03-08 12:19:26.149) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=43) between -1 and 101" [ INFO] [1646722166.151364172]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.081955s [ WARN] (2022-03-08 12:19:26.319) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=41) between -1 and 102" [ INFO] [1646722166.321121294]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.116140s [ WARN] (2022-03-08 12:19:26.485) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=33) between -1 and 103" [ INFO] [1646722166.487808222]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.114771s [ WARN] (2022-03-08 12:19:26.668) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=40) between -1 and 104" [ INFO] [1646722166.669596654]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.108531s [ERROR] (2022-03-08 12:19:26.685) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 443 is ignored! [ INFO] [1646722166.685371754]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0111s, RTAB-Map=0.0001s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:26.882) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=45) between -1 and 105" [ INFO] [1646722166.883698248]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.102901s [ WARN] (2022-03-08 12:19:26.996) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=57) between -1 and 106" [ INFO] [1646722166.997167840]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.093701s [ WARN] (2022-03-08 12:19:27.135) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 107" [ INFO] [1646722167.137014782]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.072633s [ WARN] (2022-03-08 12:19:27.225) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=43) between -1 and 108" [ INFO] [1646722167.226502083]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.069486s [ WARN] (2022-03-08 12:19:27.368) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 109" [ INFO] [1646722167.369437717]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.085565s [ WARN] (2022-03-08 12:19:27.517) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=34) between -1 and 110" [ INFO] [1646722167.519896907]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.117761s [ WARN] (2022-03-08 12:19:27.704) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=44) between -1 and 111" [ INFO] [1646722167.707025991]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.158291s [ WARN] (2022-03-08 12:19:27.914) util3d_registration.cpp:186::transformFromXYZCorrespondences() RANSAC refineModel: Refinement failed: got an empty set of inliers! [ WARN] (2022-03-08 12:19:27.915) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=45) between -1 and 112" [ INFO] [1646722167.917488994]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.167526s [ERROR] (2022-03-08 12:19:27.934) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 473 is ignored! [ INFO] [1646722167.938496065]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0130s, RTAB-Map=0.0040s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:28.127) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=35) between -1 and 113" [ INFO] [1646722168.129645271]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.159369s [ WARN] (2022-03-08 12:19:28.264) util3d_registration.cpp:186::transformFromXYZCorrespondences() RANSAC refineModel: Refinement failed: got an empty set of inliers! [ WARN] (2022-03-08 12:19:28.264) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=60) between -1 and 114" [ INFO] [1646722168.265792466]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.086479s [ WARN] (2022-03-08 12:19:28.443) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=47) between -1 and 115" [ INFO] [1646722168.445117298]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.124011s [ WARN] (2022-03-08 12:19:28.624) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=54) between -1 and 116" [ INFO] [1646722168.625877676]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.128980s [ WARN] (2022-03-08 12:19:28.862) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=51) between -1 and 117" [ INFO] [1646722168.863944332]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.145066s [ WARN] (2022-03-08 12:19:29.022) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=33) between -1 and 118" [ INFO] [1646722169.023859296]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.141222s [ERROR] (2022-03-08 12:19:29.042) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 499 is ignored! [ INFO] [1646722169.042913286]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0191s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:29.188) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=42) between -1 and 119" [ INFO] [1646722169.189619088]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.104939s [ WARN] (2022-03-08 12:19:29.368) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=40) between -1 and 120" [ INFO] [1646722169.370661067]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.120095s [ WARN] (2022-03-08 12:19:29.636) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=33) between -1 and 121" [ INFO] [1646722169.637901128]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.144325s [ WARN] (2022-03-08 12:19:29.804) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=33) between -1 and 122" [ INFO] [1646722169.805900799]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.155377s [ WARN] (2022-03-08 12:19:30.030) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=42) between -1 and 123" [ INFO] [1646722170.032187512]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.160413s [ERROR] (2022-03-08 12:19:30.076) Rtabmap.cpp:1277::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 523 is ignored! [ INFO] [1646722170.076812517]: rtabmap (1): Rate=1.00s, Limit=0.000s, Conversion=0.0409s, RTAB-Map=0.0002s, Maps update=0.0000s pub=0.0000s (local map=1, WM=1) [ WARN] (2022-03-08 12:19:30.240) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=45) between -1 and 124" [ INFO] [1646722170.247755402]: Odom: quality=3, std dev=0.000000m|0.000000rad, update time=0.183734s [ WARN] (2022-03-08 12:19:30.432) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=48) between -1 and 125" [ INFO] [1646722170.433512698]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.114305s [ WARN] (2022-03-08 12:19:30.549) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=44) between -1 and 126" [ INFO] [1646722170.550210039]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.102671s [ WARN] (2022-03-08 12:19:30.682) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=55) between -1 and 127" [ INFO] [1646722170.683322961]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.113423s ^C[ WARN] (2022-03-08 12:19:30.832) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=46) between -1 and 128" [ INFO] [1646722170.833461500]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.122666s [rviz-15] killing on exit [rtabmap/rtabmapviz-14] killing on exit [rtabmap/rtabmap-13] killing on exit [rtabmap/rgbd_odometry-12] killing on exit [zedB/camera_nodelet_manager2-9] killing on exit [zedB/base_to_camera1_tf-11] killing on exit [zedB/rgbd_sync-10] killing on exit [zedB/zed_node_B-8] killing on exit [zedB/zed_state_publisher-7] killing on exit [zedA/base_to_camera0_tf-6] killing on exit [ INFO] [1646722170.900177508]: rtabmapviz: ctrl-c catched! Exiting Qt app... [ WARN] (2022-03-08 12:19:30.935) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=45) between -1 and 129" [ WARN] (2022-03-08 12:19:31.030) OdometryF2M.cpp:525::computeTransform() Registration failed: "Not enough inliers 3/20 (matches=39) between -1 and 130" rtabmap: Saving database/long-term memory... (located at /home/haul/.ros/rtabmap.db) [zedA/rgbd_sync-5] killing on exit [zedA/camera_nodelet_manager1-4] killing on exit [zedA/zed_node_A-3] killing on exit [zedA/zed_state_publisher-2] killing on exit ZED Nodelet destroyed ZED Nodelet destroyed rtabmap: Saving database/long-term memory...done! (located at /home/haul/.ros/rtabmap.db, 0 MB) [rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done |
|
Administrator
|
Odometry cannot be computed. Make sure the TF between the cameras is accurate.
|
| Free forum by Nabble | Edit this page |