Hi,
I am using ROS indigo. The problem is that when the robot is turning back to the mapped corridor, it cannot find correspondence to the features and cannot detect loop closure.
I recently switched to ROS indigo to test the bag, but had no such problem on Hydro.
My launch file with parameters is below:
<launch>
<!-- ROBOT MAPPING VERSION: use this with ROS bag demo_mapping.bag -->
<!-- WARNING : Database is automatically deleted on each startup -->
<!-- See "delete_db_on_start" option below... -->
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<param name="use_sim_time" type="bool" value="True"/>
<group ns="rtabmap">
<!-- SLAM (robot side) -->
<!-- args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="rgb/image" to="/data_throttled_image"/>
<remap from="depth/image" to="/data_throttled_image_depth"/>
<remap from="rgb/camera_info" to="/data_throttled_camera_info"/>
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
<!-- RTAB-Map's parameters: do "rosrun rtabmap rtabmap (double-dash)params" to see the list of available parameters. -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/> <!-- Do odometry correction with consecutive laser scans -->
<param name="RGBD/ProximityBySpace" type="string" value="true"/> <!-- Local loop closure detection (using estimated position) with locations in WM -->
<param name="RGBD/ProximityByTime" type="string" value="false"/> <!-- Local loop closure detection with locations in STM -->
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Reg/Strategy" type="string" value="2"/> <!-- 0=No ICP, 1=ICP 3D, 2=ICP 2D -->
<param name="Vis/MaxDepth" type="string" value="4.0"/> <!-- 3D visual words maximum depth 0=infinity -->
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Vis/InlierDistance" type="string" value="0.05"/> <!-- 3D visual words correspondence distance -->
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/> <!-- Optimize graph from initial node so /map -> /odom transform will be generated -->
<param name="Optimizer/Slam2D" type="string" value="true"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Mem/IncrementalMemory" type="string" value="true"/> <!-- true = Mapping/SLAM mode-->
<param name="DbSqlite3/InMemory" type="string" value="false"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/> <!-- Don't need to do relocation very often! Though better results if the same rate as when mapping. -->
<param name="RGBD/AngularUpdate" type="string" value="0.01"/> <!-- Update map only if the robot is moving -->
<param name="RGBD/LinearUpdate" type="string" value="0.01"/> <!-- Update map only if the robot is moving -->
<param name="Kp/MaxFeatures" type="string" value="400"/>
<param name="SURF/HessianThreshold" type="string" value="1000"/>
<param name="Rtabmap/StatisticLogged" type="string" value="true"/>
<param name="Rtabmap/StatisticLogsBufferedInRAM" type="string" value="true"/>
<param name="Icp/Iterations" type="string" value="100"/>
<param name="Icp/VoxelSize" type="string" value="0"/>
<param name="RGBD/NewMapOdomChangeDistance" type="string" value="4"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/> <!-- Optimize graph from initial node so /map -> /odom transform will be generated -->
<param name="Grid/FromDepth" type="string" value="false"/> <!-- Set to true if using laserscan_from_depth (rgbd sensor) -->
<param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
<param name="Mem/NotLinkedNodesKept" type="string" value="false"/>
</node>
<!-- Visualisation RTAB-Map -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="wait_for_transform" type="bool" value="true"/>
<remap from="rgb/image" to="/data_throttled_image"/>
<remap from="depth/image" to="/data_throttled_image_depth"/>
<remap from="rgb/camera_info" to="/data_throttled_camera_info"/>
<remap from="scan" to="/scan"/>
<remap from="odom" to="/odom"/>
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
</node>
</group>
<!-- Visualisation RVIZ -->
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/demo_robot_mapping.rviz" output="screen"/>
<node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/data_throttled_image"/>
<remap from="depth/image" to="/data_throttled_image_depth"/>
<remap from="rgb/camera_info" to="/data_throttled_camera_info"/>
<remap from="cloud" to="voxel_cloud" />
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
<param name="queue_size" type="int" value="10"/>
<param name="voxel_size" type="double" value="0.01"/>
</node>
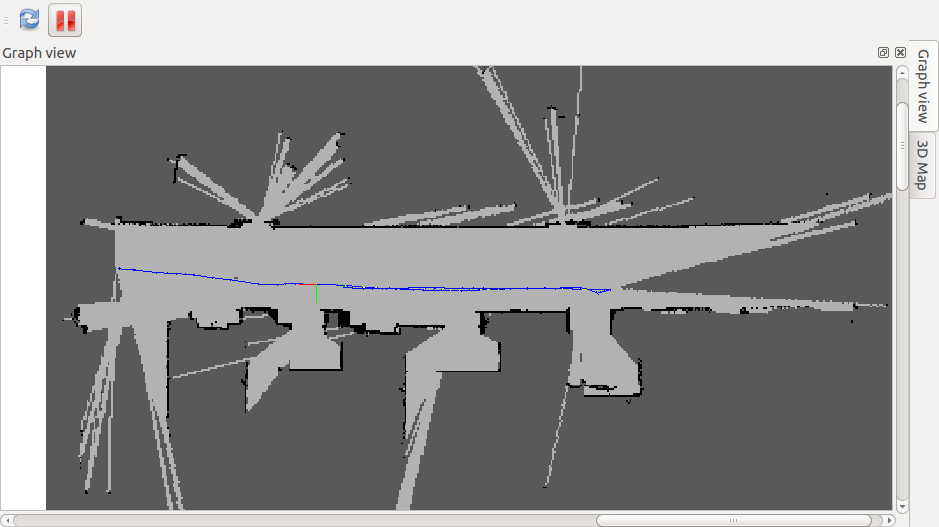
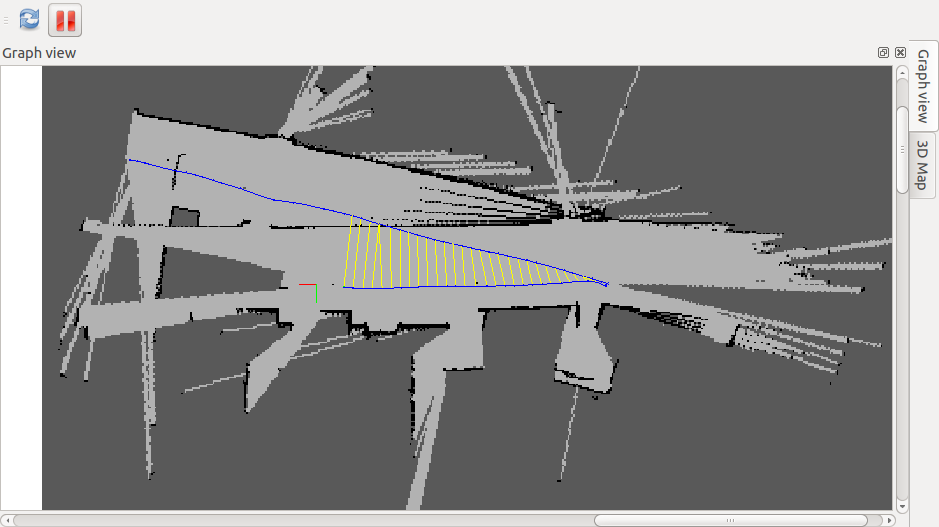
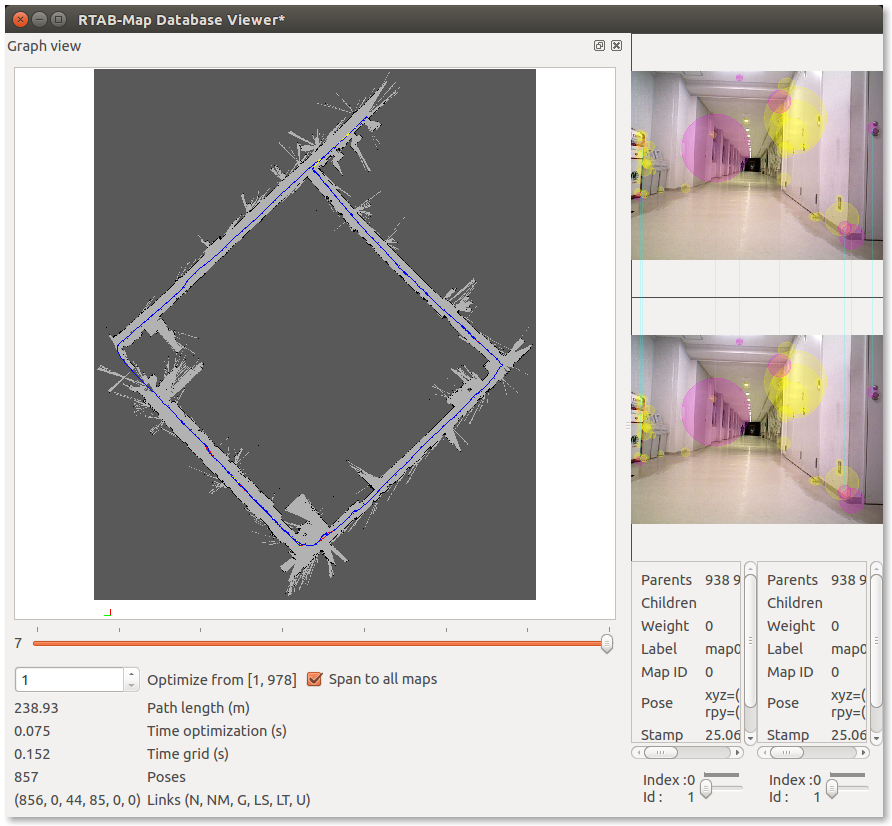
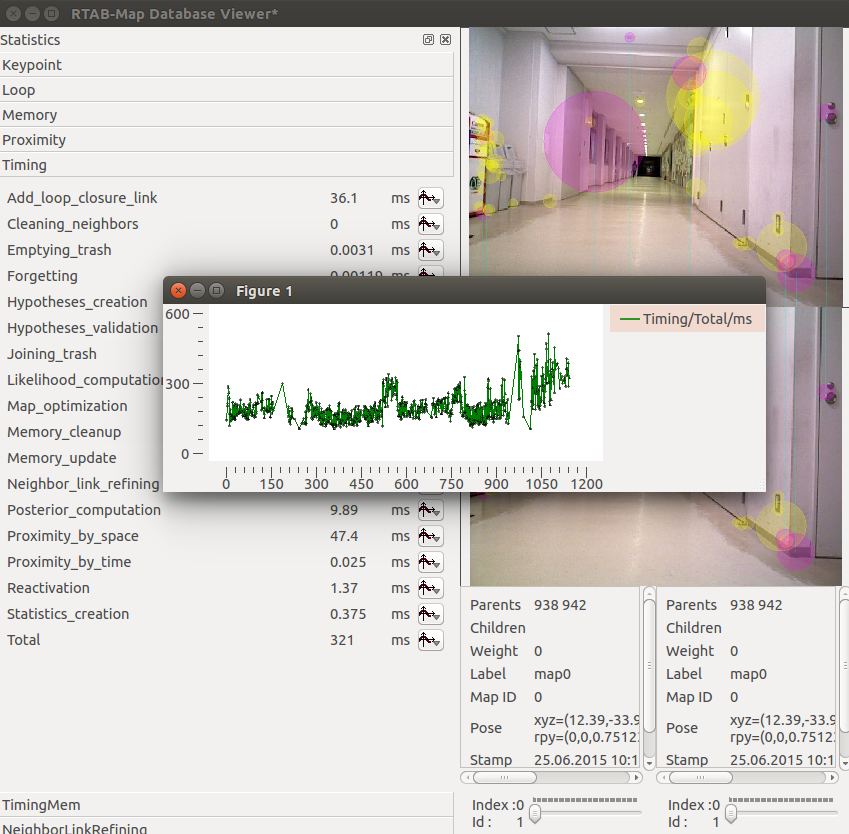
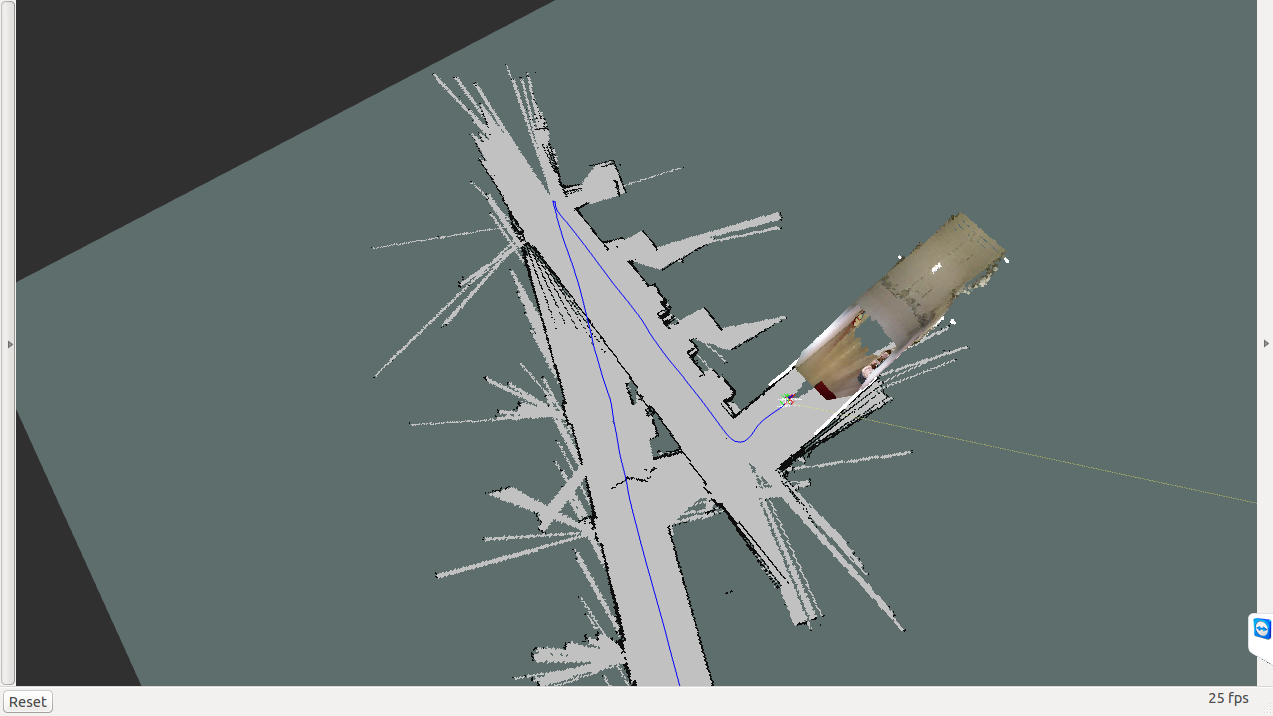
</launch>Attached is the picture of the scene (Indigo). Another problem is that the long corridor map does not remain straight for most part of the mapping process.The robot has relatively good odometry and I am using a hokuyo lidar as well for scan matching. Is there any paraeters I can set to correct this effect. As I said in Hydro I did not faced such problem. NOt sure what is wrong.
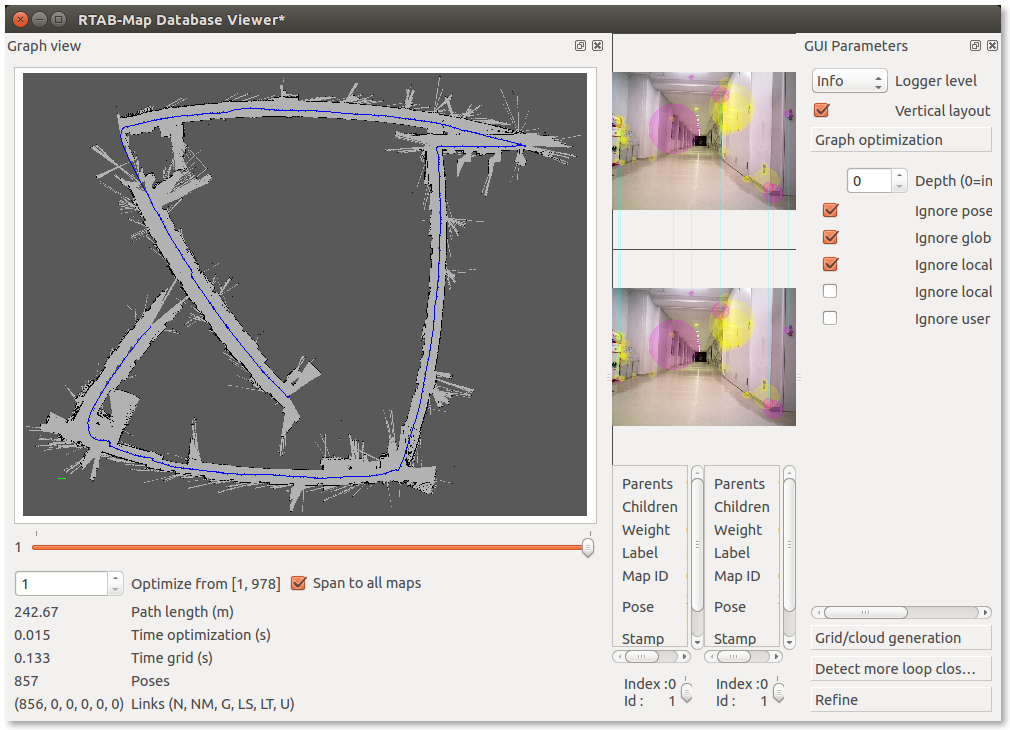
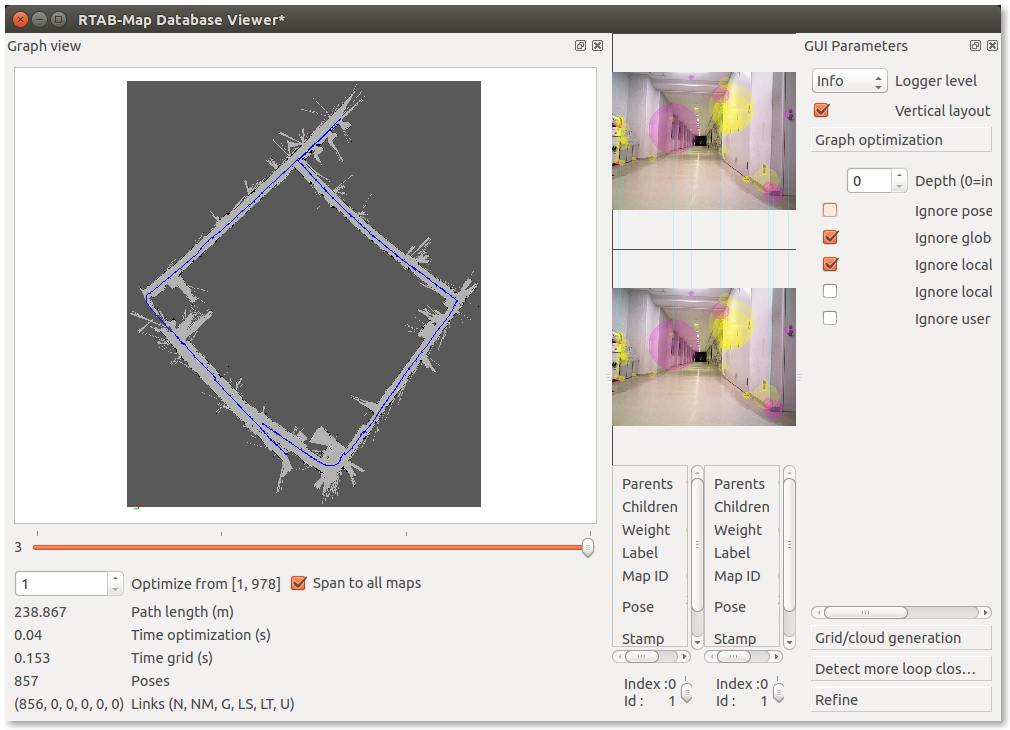
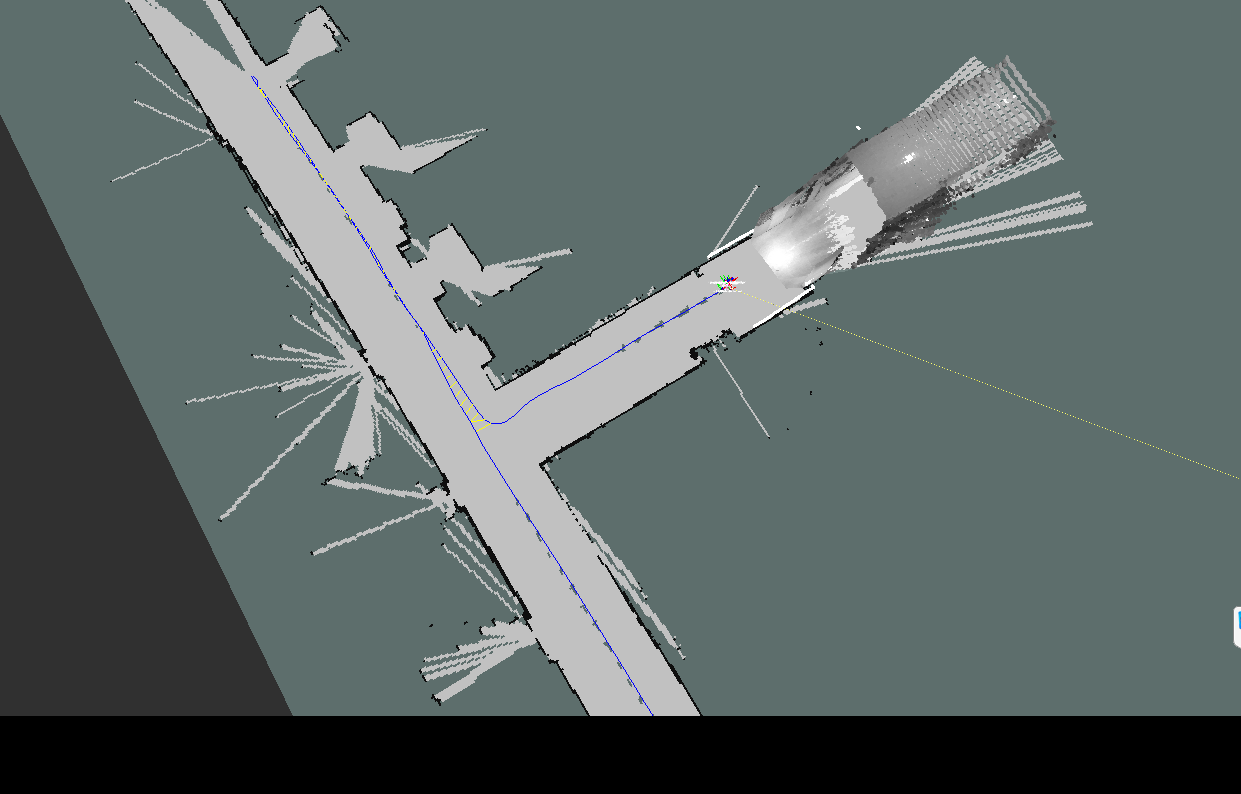
Next picture is from same bag file when run on ROS Hydro.
Many Thanks
Alex
------
Alex