RTABMap with 3D lidar did not make map


|
This post was updated on .
I would like to make a map using 3d lidar. The lidar I'm using has a viewing angle of 135 degrees. I now have a tf connected by odom -> base_link -> lidar.
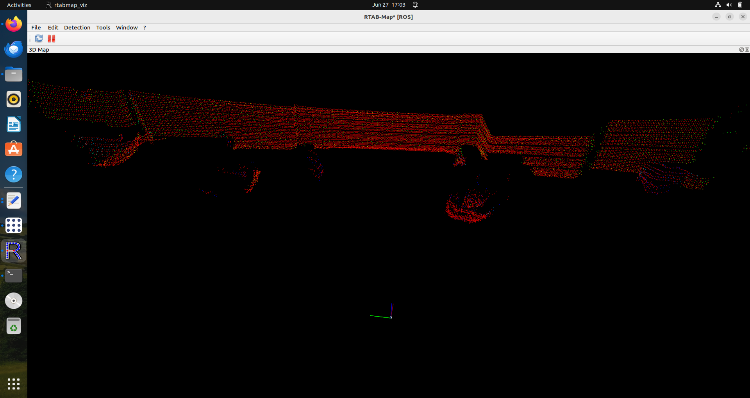
My problem is that the map frame is not generated.
  .  And my launch file. # -*- mode: Python -*- import os from launch import LaunchDescription from launch_ros.actions import Node from launch.substitutions import LaunchConfiguration from ament_index_python.packages import get_package_share_directory from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, ExecuteProcess from launch.conditions import IfCondition, UnlessCondition from launch_ros.actions import Node, SetRemap from launch_ros.substitutions import FindPackageShare from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.actions import Shutdown import launch ################### user configure parameters for ros2 start ################### manufacture_id = 'autol' model_id = 'G32' input_type = 1 frame_rate = 25 lidar_count = 1 lidar_port_1 = 5001 lidar_port_2 = 5002 lidar_port_3 = 5003 lidar_port_4 = 5004 lidar_port_5 = 5005 lidar_port_6 = 5006 pcap_path = '' packet_per_frame = 180 read_once = 0 read_fast = 0 repeat_delay = 0.0 calibration = False rviz_config=get_package_share_directory('autol_driver')+'/rviz/pointcloud2_config.rviz' autol_node_parameters = [ #Sensor Parameter {"manufacture_id": manufacture_id}, {"model_id": model_id}, {"input_type" : input_type}, {"frame_rate": frame_rate}, #Socket Parameter {"lidar_count": lidar_count}, {"lidar_port_1": lidar_port_1}, {"lidar_port_2": lidar_port_2}, {"lidar_port_3": lidar_port_3}, {"lidar_port_4": lidar_port_4}, {"lidar_port_5": lidar_port_5}, {"lidar_port_6": lidar_port_6}, #Pcap Parameter {"pcap_path": pcap_path}, {"packet_per_frame": packet_per_frame}, {"read_once": read_once}, {"read_fast": read_fast}, {"repeat_delay": repeat_delay}, #calibration {"calibration" : calibration}, ] urdf_name = 'test.urdf.xml' urdf_file = os.path.join(get_package_share_directory('autol_driver')+'/urdf',urdf_name) with open(urdf_file, 'r') as infp: robot_desc = infp.read() autol_prefix = get_package_share_directory('autol_driver') autol_config_dir = LaunchConfiguration('autol_config_dir', default=os.path.join( autol_prefix, 'configuration_files')) configuration_basename = LaunchConfiguration('configuration_basename', default='test.lua') def generate_launch_description(): autol_driver = Node( package='autol_driver', executable='autol_driver_node', name='autol_lidar_publisher', output='screen', parameters=autol_node_parameters, remappings=[ ('/autol_pointcloud_1', '/scan_cloud') ] ) rtabmap_odom = Node( package = 'rtabmap_odom', executable = 'icp_odometry', output = 'screen', parameters = [{ 'frame_id':'base_link', 'odom_frame_id':'odom', 'wait_for_transform':0.2, 'expected_update_rate':15.0, }], arguments=[ 'Icp/PointToPlane', 'false', 'Icp/Iterations', '10', 'Icp/VoxelSize', '0.2', 'Icp/Epsilon', '0.001', 'Icp/PointToPlaneK', '20', 'Icp/PointToPlaneRadius', '0', 'Icp/MaxTranslation', '2', 'Icp/MaxCorrespondenceDistance', '1', 'Icp/Strategy', '1', 'Icp/OutlierRatio', '0.7', 'Icp/CorrespondenceRatio', '0.01', 'Odom/ScanKeyFrameThr', '0.4', 'OdomF2M/ScanSubtractRadius', '0.1', 'OdomF2M/ScanMaxSize', '15000', 'OdomF2M/BundleAdjustment', 'false', 'Odom/GuessMotion', 'true', 'Odom/ResetCountdown', '1', ]) rtabmap_util = Node( package = 'rtabmap_util', executable = 'point_cloud_assembler', output = 'screen', parameters = [{ 'max_cloud':10, 'fixed_frame_id':'odom', }] ) rtabmap_slam = Node( package = 'rtabmap_slam', executable = 'rtabmap', output = 'screen', parameters = [{ 'frame_id':'base_link', 'subscribe_depth':False, 'subscribe_rgb':False, 'subscribe_scan':False, 'subscribe_scan_cloud':True, 'approx_sync':False, 'wait_for_transform':0.2, }], arguments = [ '-d', 'RGBD/ProximityMaxGraphDepth', '0', 'RGBD/ProximityPathMaxNeighbors', '1', 'RGBD/AngularUpdate', '0.05', 'RGBD/LinearUpdate', '0.05', 'RGBD/CreateOccupancyGrid', 'true', 'Mem/NotLinkedNodesKept', 'false', 'Mem/STMSize', '30', 'Mem/LaserScanNormalK', '20', 'Reg/Strategy', '1', 'Icp/VoxelSize', '0.1', 'Icp/PointToPlaneK', '20', 'Icp/PointToPlaneRadius', '0', 'Icp/PointToPlane', 'true', 'Icp/Iterations', '10', 'Icp/Epsilon', '0.001', 'Icp/MaxTranslation', '3', 'Icp/MaxCorrespondenceDistance', '1', 'Icp/Strategy', '1', 'Icp/OutlierRatio', '0.7', 'Icp/CorrespondenceRatio', '0.2', ]) rtabmap_viz = Node( package = 'rtabmap_viz', executable = 'rtabmap_viz', output = 'screen', parameters = [{ 'frame_id':'base_link', 'odom_frame_id':'odom', 'subscribe_odom_info':True, 'subscribe_scan_cloud':True, 'approx_sync':False, }], ) robot_state_publisher = Node( package = 'robot_state_publisher', executable = 'robot_state_publisher', parameters=[ {'robot_description': robot_desc}], output = 'screen' ) return LaunchDescription([ autol_driver, rtabmap_odom, rtabmap_util, rtabmap_slam, rtabmap_viz, robot_state_publisher ]) |
|
Administrator
|
Are there any warnings on the terminal?
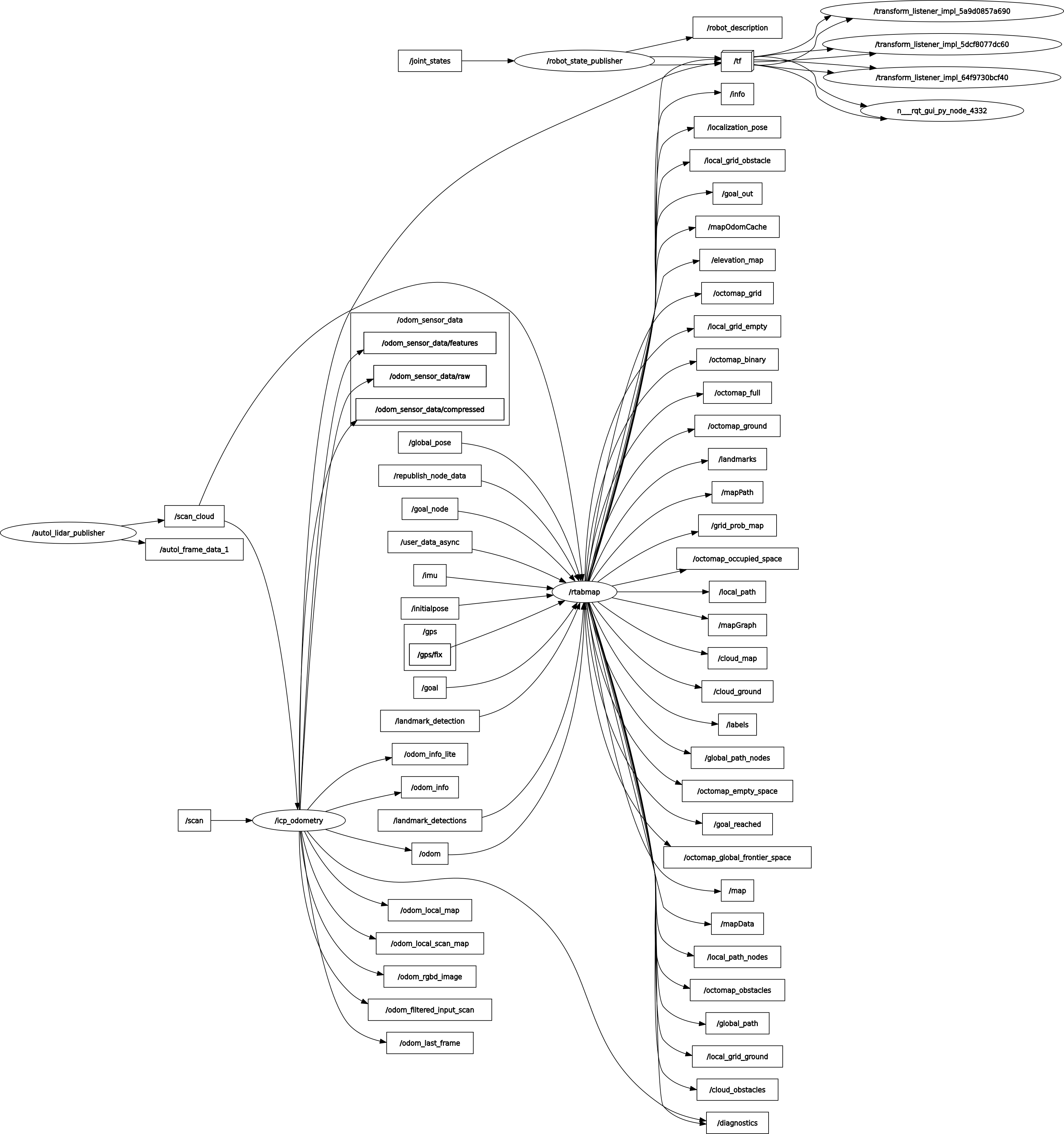
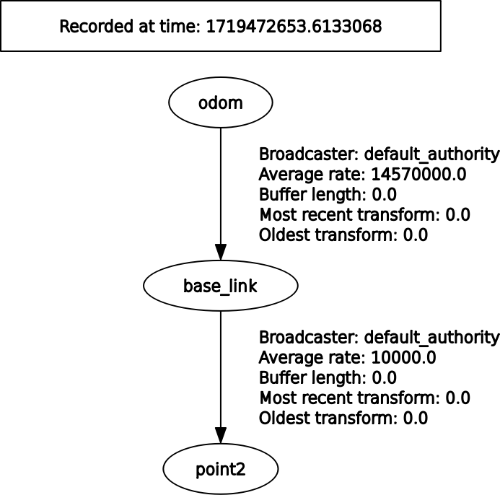
The odom -> base_link TF frame from "default _authority" looks strange to me, it should be published by "icp_odometry". If two nodes are publishing "odom", that could create issues on rtabmap node. |
|
|
The terminal is exporting an alert. But I don't know if this has anything to do with publishing topics of the same topic.
On ICP odometry
[WARN] [1719823789.655151813] [icp_odometry]: Odometry lost! Odometry will be reset after next 1 consecutive unsuccessful odometry updates... [WARN] [1719823789.668568977] [icp_odometry]: Odometry automatically reset to latest odometry pose available from TF (odom->base_link)! [INFO] [1719823789.668650004] [icp_odometry]: Odom: ratio=0.000000, std dev=0.000000m|0.000000rad, update time=0.013600s [INFO] [1719823789.705445004] [icp_odometry]: Odom: ratio=0.000000, std dev=99.995000m|99.995000rad, update time=0.000559s [INFO] [1719823790.272023608] [icp_odometry]: Odom: ratio=0.826923, std dev=0.011438m|0.003617rad, update time=0.132054s [WARN] [1719823790.736538007] [icp_odometry]: Odometry lost! Odometry will be reset after next 1 consecutive unsuccessful odometry updates... [WARN] [1719823790.737340801] [icp_odometry]: Odometry automatically reset to latest odometry pose available from TF (odom->base_link)! [INFO] [1719823790.738058499] [icp_odometry]: Odom: ratio=0.000000, std dev=0.000000m|0.000000rad, update time=0.001613s [WARN] [1719823791.702692474] [icp_odometry]: icp_odometry: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. [WARN] [1719823652.151233456] [rtabmap_viz]: rtabmap_viz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ ros2 topic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). rtabmap_viz subscribed to: /scan_cloud [WARN] [1719823657.154653390] [rtabmap_viz]: rtabmap_viz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ ros2 topic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). rtabmap_viz subscribed to: /scan_cloud [WARN] [1719823688.412401888] [rtabmap]: rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ ros2 topic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). rtabmap subscribed to (approx sync): /odom \ /scan_cloud [WARN] [1719823693.423493220] [rtabmap]: rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ ros2 topic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10). rtabmap subscribed to (approx sync): /odom \ /scan_cloud |
|
Administrator
|
The odometry keeps getting lost, so the downstream nodes (e.g., mapping) cannot do anything. Do you have a small rosbag to share to see why odometry is getting lost?
|
|
|
|
Administrator
|
Th scan topic doesn't have a valid timestamp:
ros2 topic echo /scan_cloud --field header stamp: sec: 0 nanosec: 0 frame_id: point2That's why odometry continuously resets. |
|
|
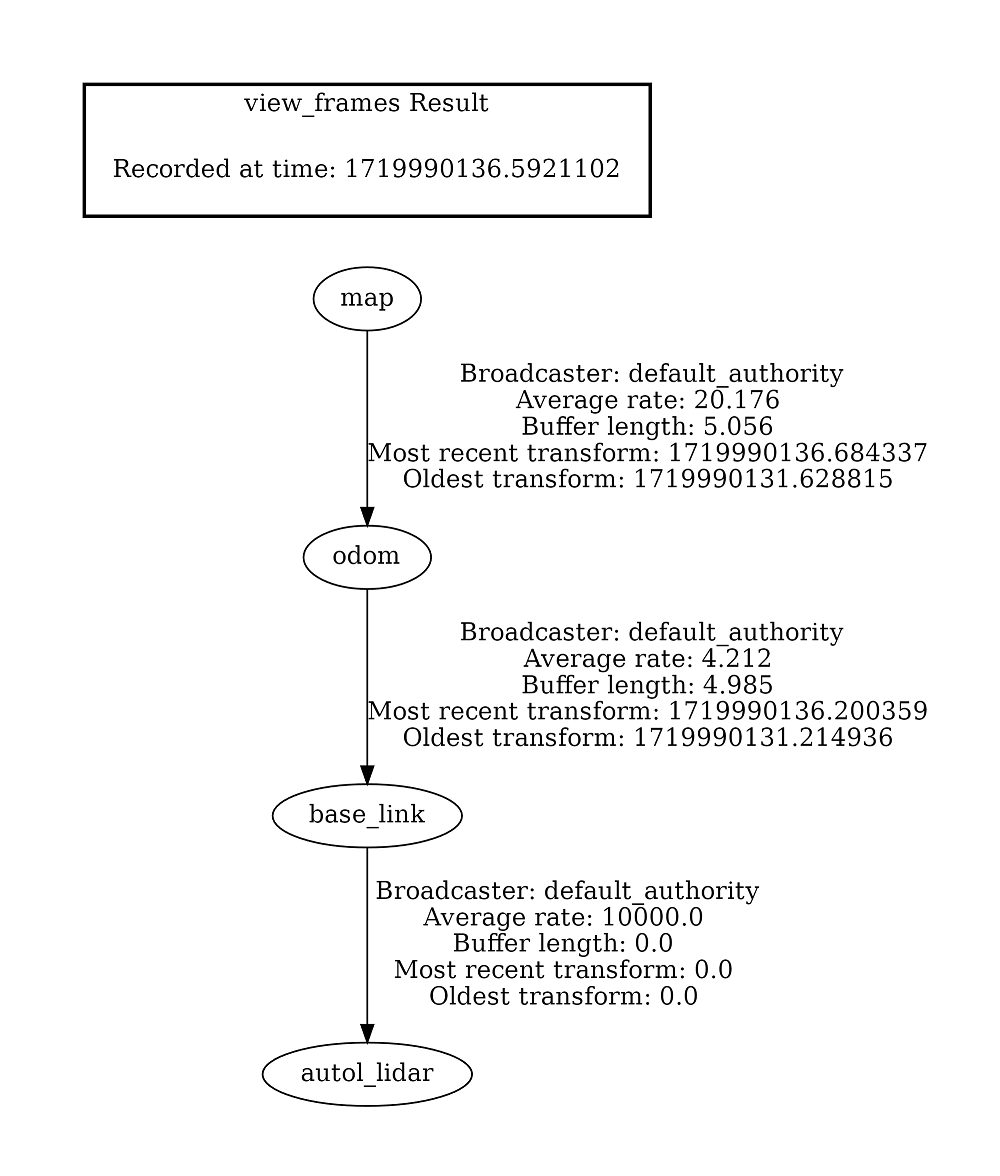  Still broadcaster is "default _authority" and did not receive data warning message, but I can now make a map. Thank you for your help! |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |