Hello Mathieu,
Thanks for the response! I am trying to do SLAM.
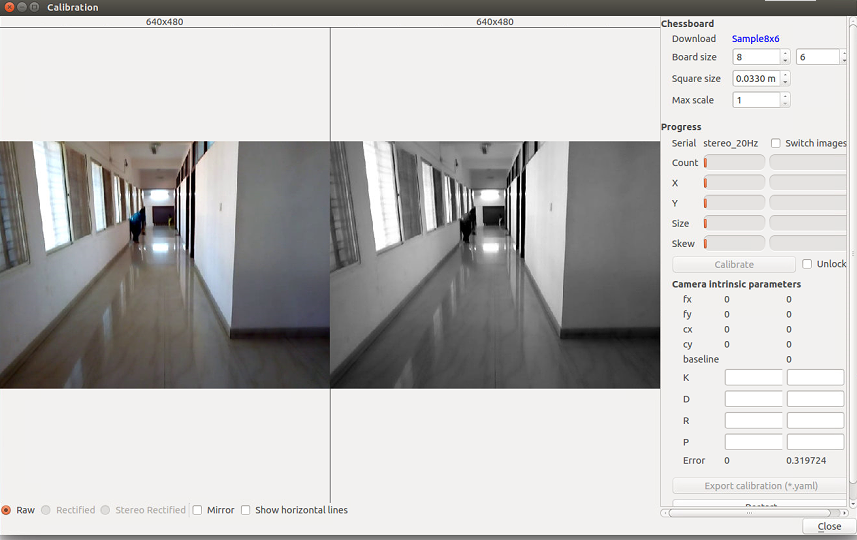
I first tried working with "source input" as Stereo images. But, i could not calibrate the camera (fig 1)
Later, I used the file chessboard.avi and calibrated the camera and started mapping. But, as expected, the results were wrong.
Is there a way to calibrate the camera and do SLAM with the images that i have acquired using RTABMap?
(I do not have Kinect sensor/stereo cameras. All i have is a few images captured from cell phone)
Thanks,
Raksha