Quick question regarding running realsense r200 on ubuntu.
This already works on windows, and i just hadn't tried yet on linux
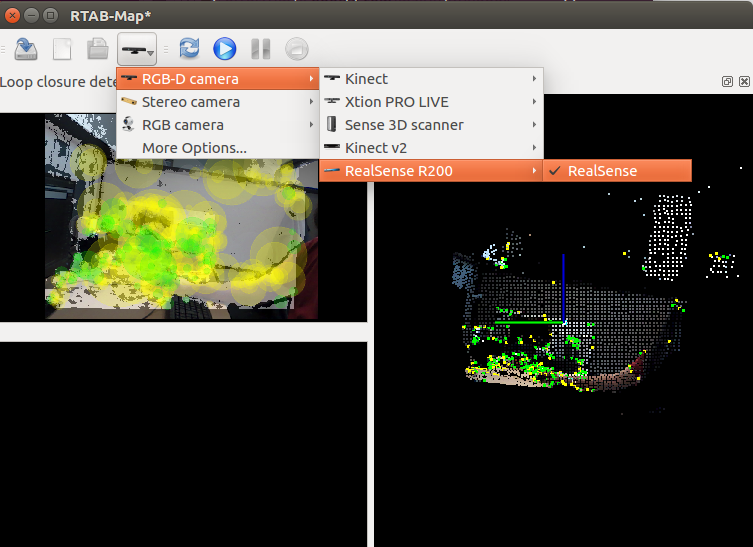
I noticed that the RTAB MAP GUI has the option for the r200 greyed out by default. On my system I installed ros and ros_rtabmap and just running rtabmap from terminal. i thought perhaps this was because of how i installed, but another person mentioned that they did the "regular" install (
here) and it's also greyed out.
On the this issue page (
here) looks like the original support for the r200.
Did we miss the page on the wiki or in an issue outlining getting the r200 running on linux *without* ros?