matlabbe wrote
The odometry is computed by which node?
The odometry is computed by RTAB-Map from a stereo camera input. No other source of odometry is used.
matlabbe wrote
Maybe the covariance of the odometry is very small
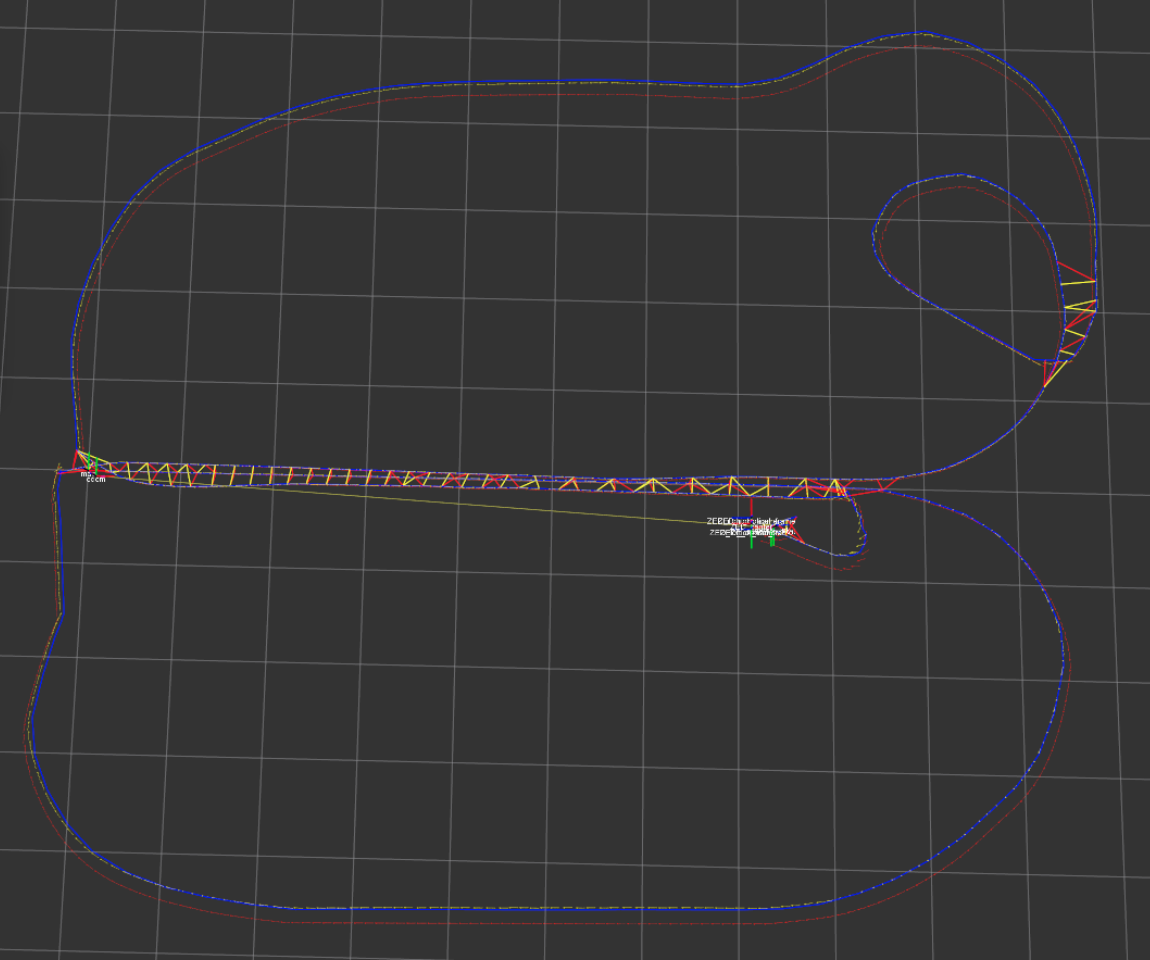
What range of covariance values are considered 'high' or 'low'? I included a file with the
odometry std deviation, as exported by RTAB-Map.
matlabbe wrote
Can you share the database?
Gladly,
rtabmap.db.
matlabbe wrote
Which parameters did you use for rtabmap node?
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.7
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_tf_angular_variance: 1.0
* /rtabmap/rtabmap/odom_tf_linear_variance: 1.0
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_stereo: True
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/approx_sync: True
* /rtabmap/rtabmapviz/frame_id: base_footprint
* /rtabmap/rtabmapviz/odom_frame_id:
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: False
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_stereo: True
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
* /rtabmap/stereo_odometry/approx_sync: True
* /rtabmap/stereo_odometry/config_path:
* /rtabmap/stereo_odometry/frame_id: base_footprint
* /rtabmap/stereo_odometry/ground_truth_base_frame_id:
* /rtabmap/stereo_odometry/ground_truth_frame_id:
* /rtabmap/stereo_odometry/odom_frame_id: odom
* /rtabmap/stereo_odometry/queue_size: 10
* /rtabmap/stereo_odometry/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
stereo_odometry (rtabmap_ros/stereo_odometry)