Hi,
It's very urgent sir, we store the camera data in the bag file. our camera is intel realsense D435 and T265, using this command
rosbag record /d435/color/image_raw/compressed /d435/aligned_depth_to_color/image_raw/compressed /t265/odom/sample /d435/color/camera_info /tf /realsense_scan
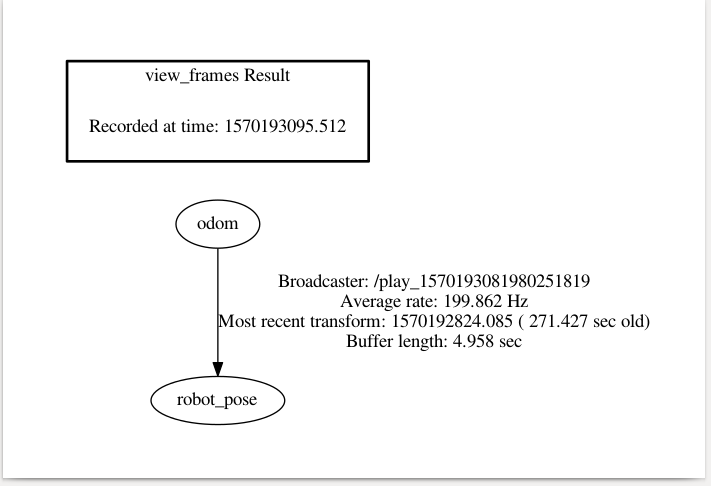
But tf does not contain all frame ids and tf have on t265 odometry frame id, so view_frame is only odom->robot_pose.
LAUNCH FILE:
<launch>
<arg name="rviz" default="false" />
<arg name="rtabmapviz" default="true" />
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<group ns="rtabmap">
<node pkg="rtabmap_ros" type="rgbd_odometry" name="visual_odometry" output="screen">
<remap from="rgb/image" to="/d435/color/image_raw"/>
<remap from="depth/image" to="/d435/aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="/d435/color/camera_info"/>
</node>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<remap from="rgb/image" to="/d435/color/image_raw"/>
<remap from="depth/image" to="/d435/aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="/d435/color/camera_info"/>
<remap from="odom" to="/t265/odom/sample"/>
<remap from="scan" to="/realsense_scan"/>
</node>
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" output="screen">
<remap from="rgb/image" to="/d435/color/image_raw"/>
<remap from="depth/image" to="/d435/aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="/d435/color/camera_info"/>
<remap from="odom" to="/t265/odom/sample"/>
<remap from="scan" to="/realsense_scan"/>
</node>
<node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/d435/color/image_raw"/>
<remap from="depth/image" to="/d435/aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="/d435/color/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
</node>
</group>
</launch>
this our rtabmap launch file
our view frames are
In rtabmap window, axis are correct path everything is correct,
we scanned the wall but the wall will construct on top,
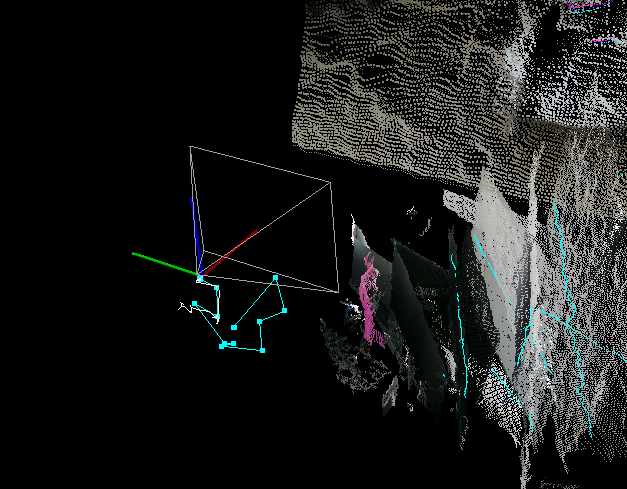
Screenshot using camera and bag file.
This image is source from camera,it is working fine
This is source from bag file, but that triangular thing facing up, is there any problem with transformations?,
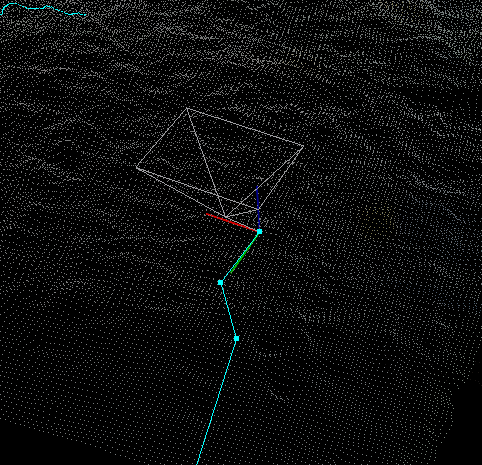
using bag file that map is getting created on top.
please, reply as soon as possible.
Thank you

