Hi Mathieu,
I am trying to do remote mapping using the
http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping. The nodelet file(rgbd_sync) runs on the odroid and I am launching the rtabmap.launch on my laptop. Mapping using the visual odometry works fine, but I want to use the rgbd topic, scan and odometry(whe
el) to get a better and accurate map.
I used the rtabmap.launch file and these are some of the parameters I set for using the scan and odom topic.
For odom topic:
<arg name="odom_frame_id" default="odom"/>
<arg name="odom_topic" default="/odom"/>
<arg name="visual_odometry" default="false"/>
<arg name="odom_sensor_sync" default="true"/>
For scan topic:
<arg name="subscribe_scan" default="true"/>
<arg name="scan_topic" default="/scan"/>
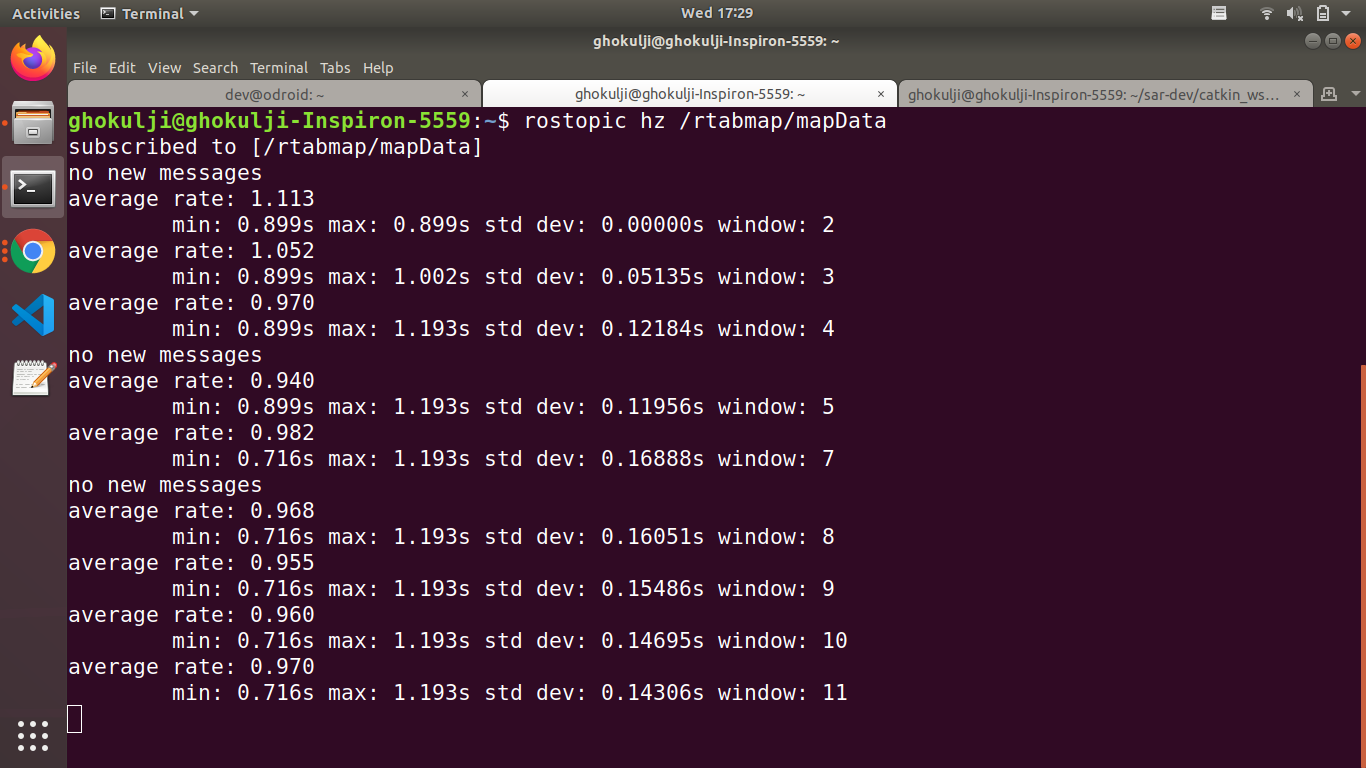
The odom topic is published, I verified using both rostopic hz and rostopic echo, but the rtabmap does not subscribe to the odom topic, I ran both the rostopic info /odom and also verified using the rqt_graph, but the odom topic is not subscribed by rtabmap.
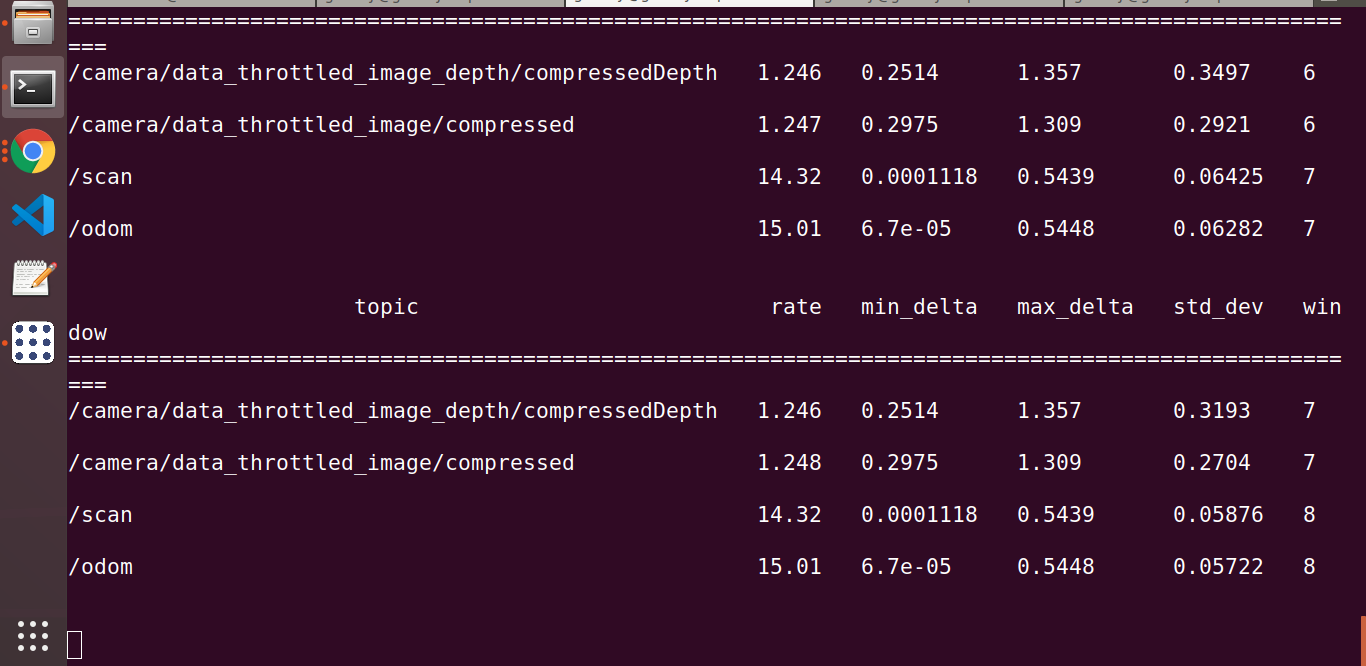
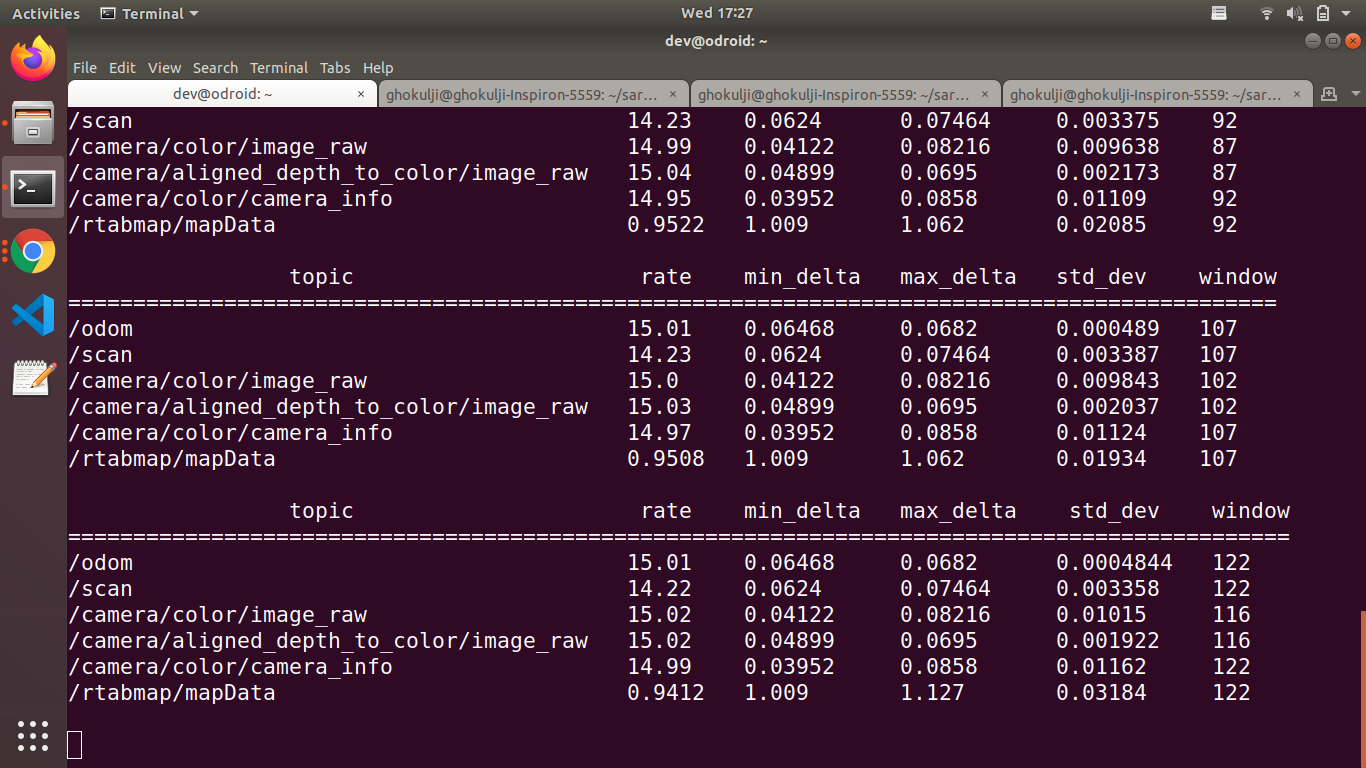
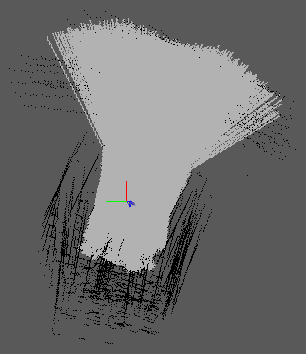
Here are some of the results:
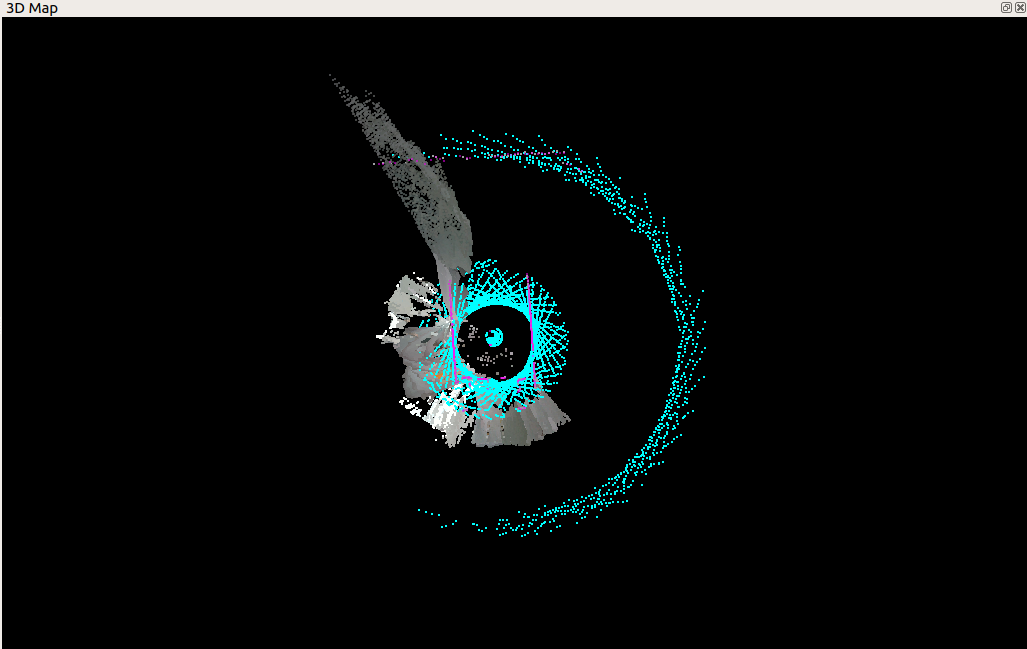
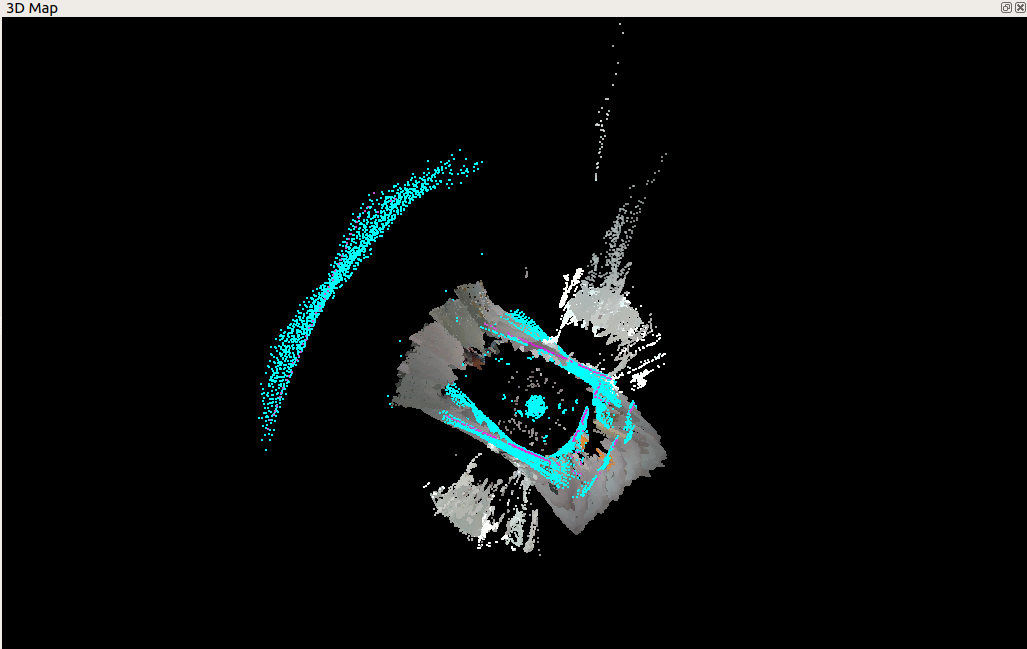
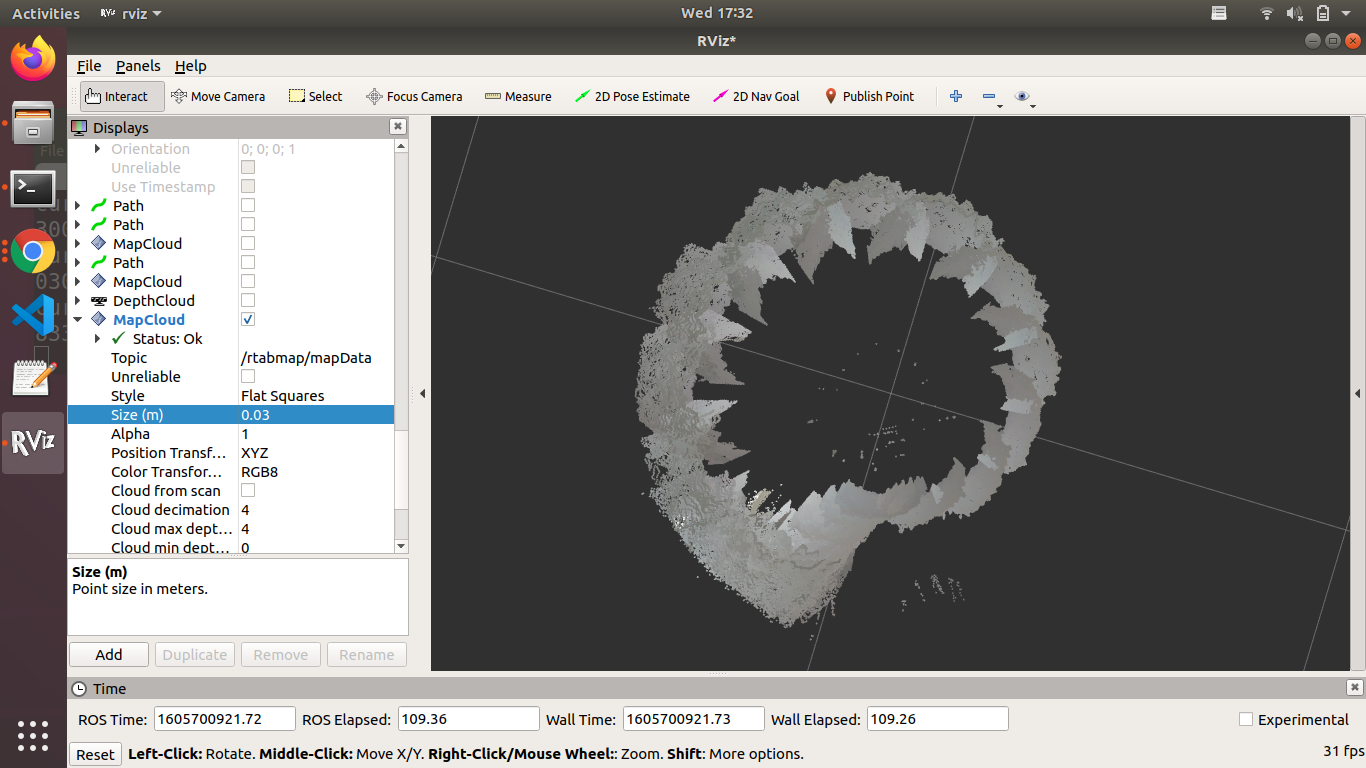
The above images are a result of rotating the robot in the same place.
I reviewed the db file and ensured the depth and color image are aligned.The 2d map shows the scan being scattered
In the remote mapping tutorial it was mentioned that the scan and odom should be passed through a relay node. Can this be the problem.
Can you suggest what may be the problem for the scan scattering and also the odom topic not subscribed by rtabmap?
Any suggestions will be helpful.