Hi,
Try this:
ParametersMap odomParameters;
odomParameters.insert(ParametersPair(Parameters::kOdomAlignWithGround(), "true"));
// Overwrite some odometry parameters
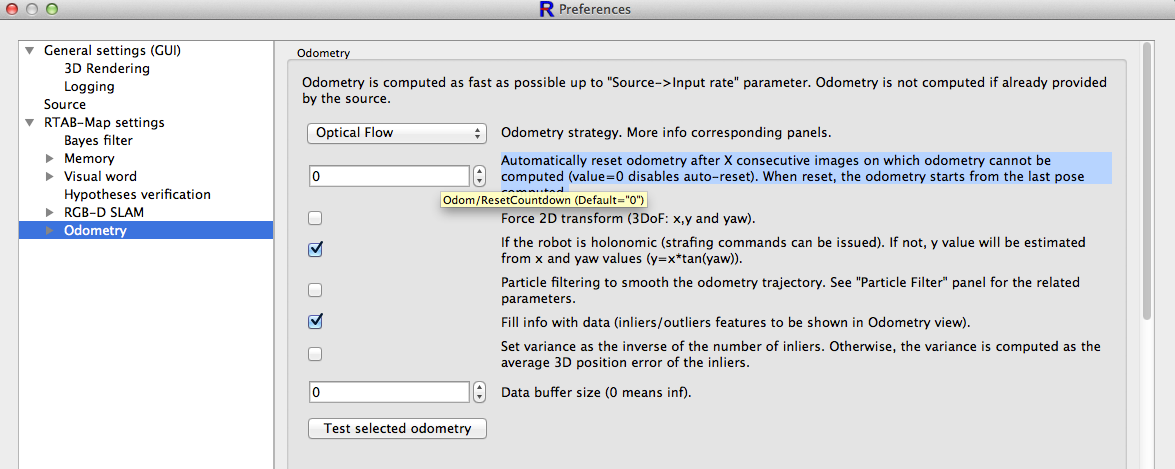
//odomParameters.insert(ParametersPair(Parameters::kOdomResetCountdown(), "1"));
Odometry * odom = Odometry::create(odomParameters);
ParametersMap parameters;
parameters.insert(ParametersPair(Parameters::kRGBDCreateOccupancyGrid(), "true"));
//Overwrite default Grid parameters:
//parameters.insert(ParametersPair(Parameters::kGrid3D(), Parameters::defaultGrid3D()));
//parameters.insert(ParametersPair(Parameters::kGridCellSize(), Parameters::defaultGridCellSize()));
//parameters.insert(ParametersPair(Parameters::kGridRangeMax(), Parameters::defaultGridRangeMax()));
Rtabmap rtabmap;
rtabmap.init(parameters, "output.db");
After mapping, open the database in rtabmap-databaseViewer:
$ rtabmap-databaseViewer output.db
In 3D View, select Grid and uncheck Cloud to better see the points used for the local grid. You can press "2" on keyboard to set colormap to red=obstacle and green=ground.
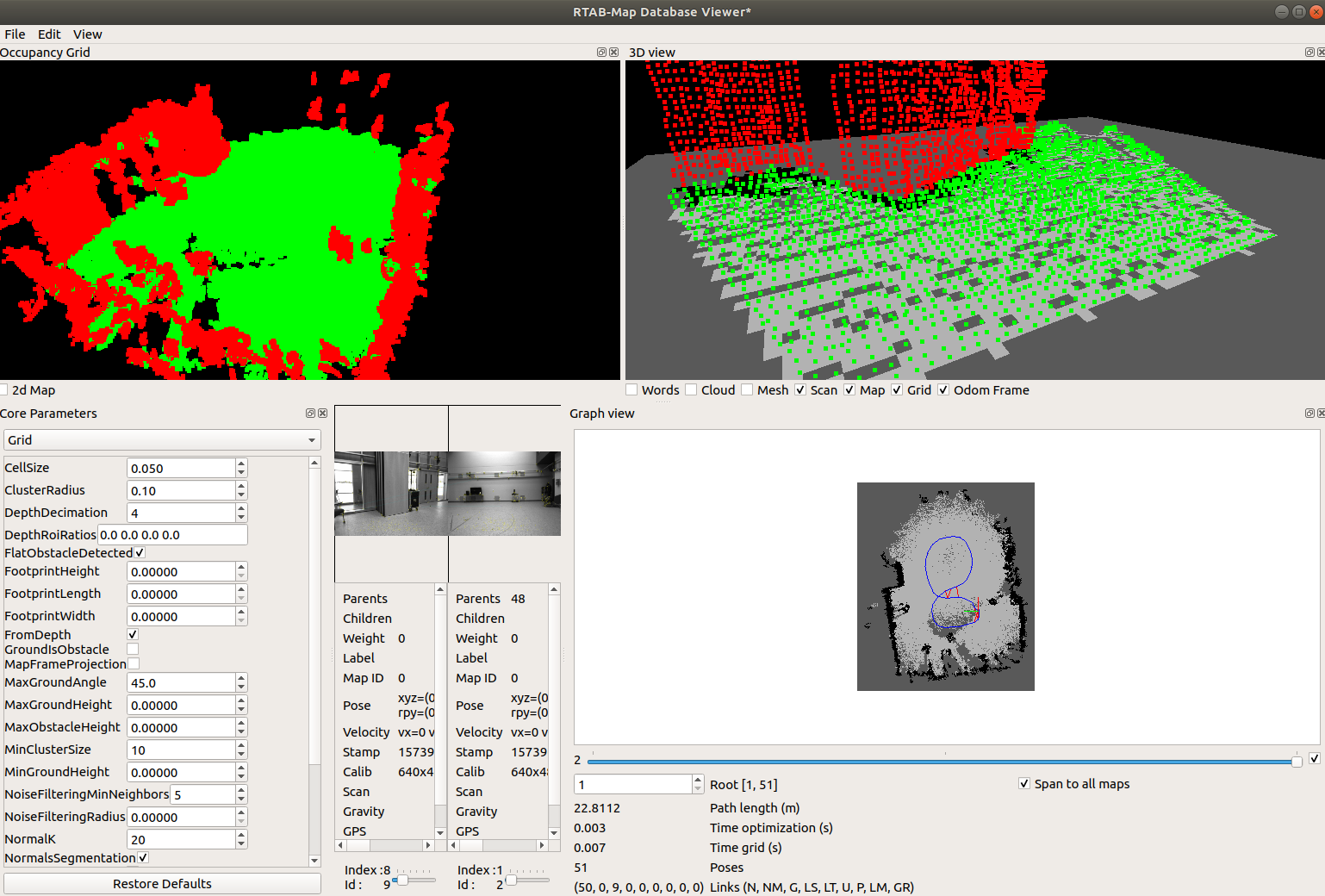
Under Grid sub panel in Core Parameters view, you can change Grid parameters to see what they do, then do Edit -> Regenerate local grid maps... to regenerate all the local grids.
cheers,
Mathieu